

如何学习基于Tansformer的目标检测算法呢?
描述
说到纯视觉的自动驾驶方案,大家第一个想到的就是Tesla吧。的确,早在2021年,Tesla就已经实现了纯视觉的BEV检测方案,而且效果非常好。
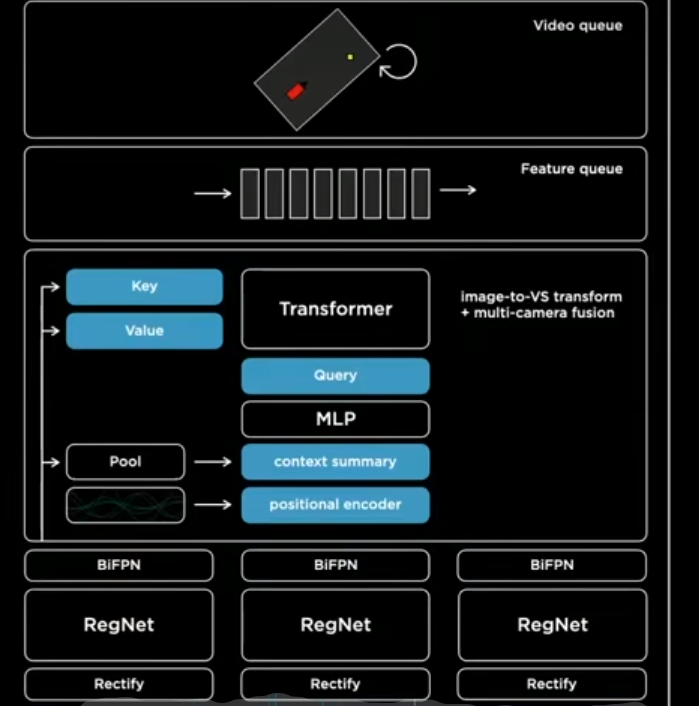
细心的同学可能发现了,这套BEV方案中将相机空间的图像转换到BEV空间的核心组件就是Transformer。
Transformer来源于自然语言处理领域,首先被应用于机器翻译。后来,大家发现它在计算机视觉领域效果也很不错,而且在各大排行榜上碾压CNN网络。
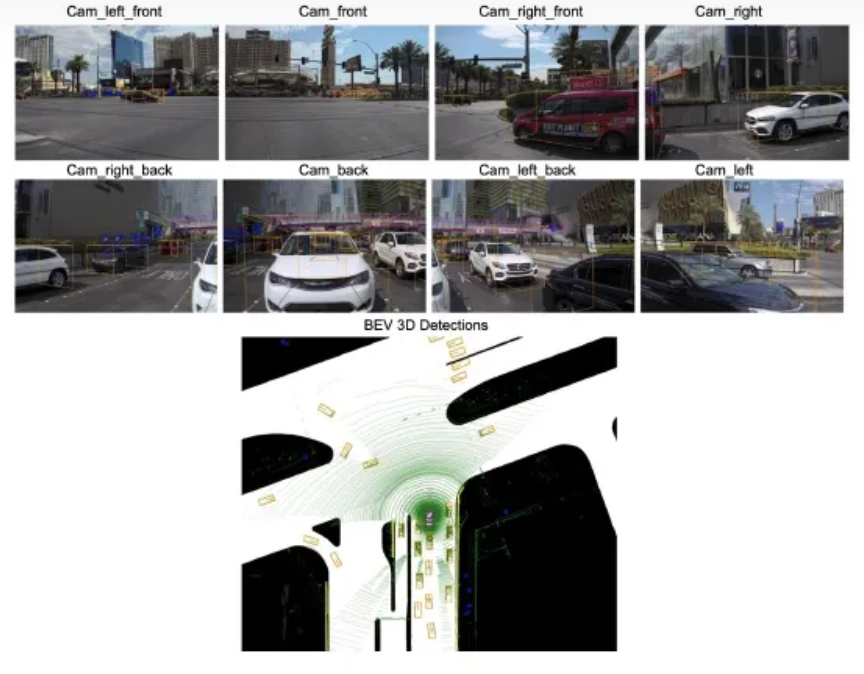
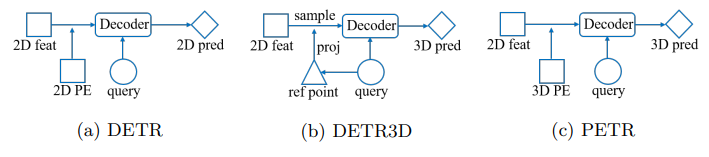
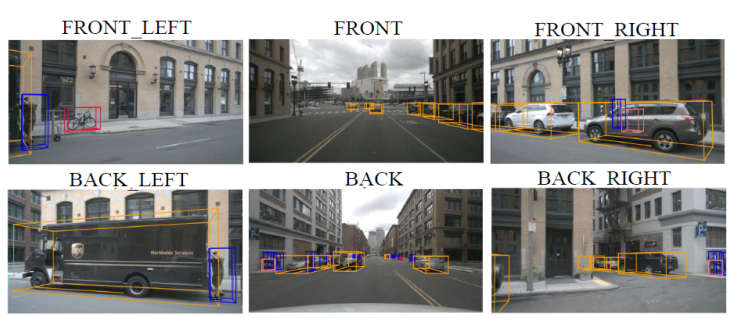
目标检测领域中,视觉Transformer不仅可以实现2D检测、3D检测,还可以实现多模态检测,BEV视角下的检测,性能也非常出色。
因此,掌握Transformer相关知识和工程基础成为了企业招聘算法工程师的一个技能要求点,也是简历上的一个很大的加分项。
然而,想要掌握基于Transformer的目标检测算法,有以下3个难点:
理解Transformer背后的理论基础,比如自注意力机制(self-attention), 位置编码(positional embedding),目标查询(object query)等等,网上的资料比较杂乱,不够系统,难以通过自学做到深入理解并融会贯通。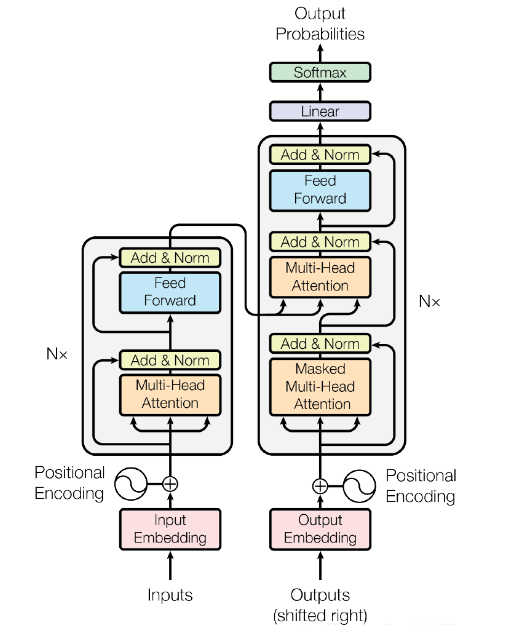
掌握基于Transformer的目标检测算法的思路和创新点,一些Transformer论文涉及的新概念比较多,话术没有那么通俗易懂,读完论文仍然不理解算法的细节部分。
 2
2
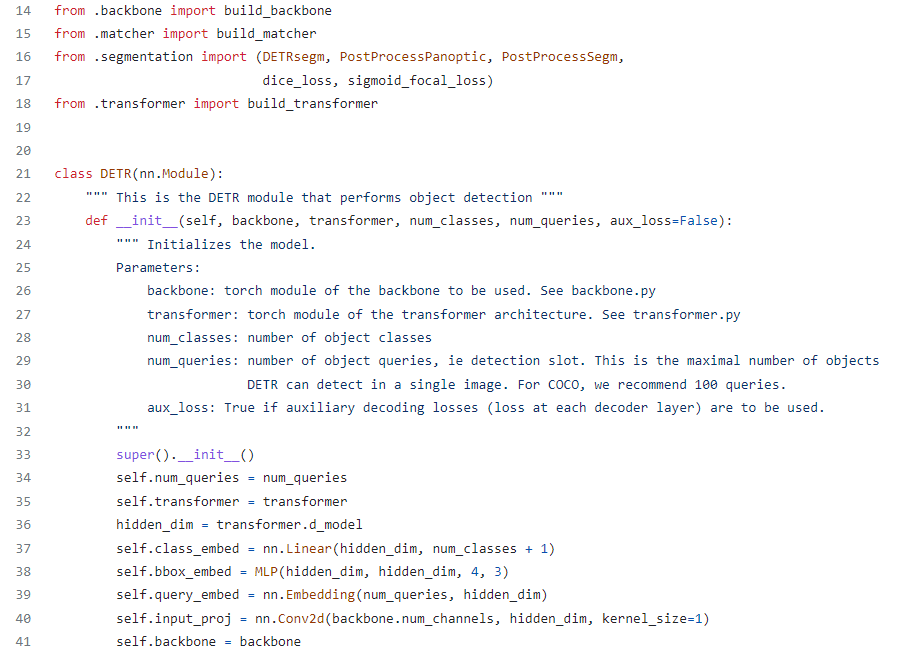
Transformer代码不易看懂,因为作用机制与CNN有不少差别,所以完全理解代码并实践应用需要花费很大功夫。
 3
3
那么如何学习基于Tansformer的目标检测算法呢?
实践部分
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 计算机视觉
- 自动驾驶
- Transformer
-
PowerPC小目标检测算法怎么实现?2019-08-09 2728
-
求一种基于机载单通道SAR数据的地面运动目标检测算法2021-06-03 1511
-
基于YOLOX目标检测算法的改进2023-03-06 1601
-
基于像素分类的运动目标检测算法2009-04-10 637
-
基于码本模型的运动目标检测算法2011-05-19 896
-
改进的ViBe运动目标检测算法_刘春2017-03-19 1446
-
基于深度学习的目标检测算法2021-04-30 11796
-
浅谈红外弱小目标检测算法2022-08-04 8551
-
基于深度学习的目标检测算法解析2023-01-09 2067
-
快速入门自动驾驶中目标检测算法2023-06-06 699
-
如何学习基于Tansformer的目标检测算法2023-06-25 1688
-
无Anchor的目标检测算法边框回归策略2023-07-17 2417
-
基于强化学习的目标检测算法案例2023-07-19 1200
-
基于Transformer的目标检测算法2023-08-16 1203
-
轩辕智驾红外目标检测算法在汽车领域的应用2025-03-27 1174
全部0条评论

快来发表一下你的评论吧 !
