

10 BASE以太网与CAN-XL对比分析
描述
来源:汽车电子与软件
[本文选自《智能汽车:新一代技术与应用》.姜鸿雷.电子工业出版社——书中第三章部分内容]
前言
随着EEA-Zonal的架构概念不断发展,为了充分利用这种新架构的优势,显然需要将以太网连接扩展到终端传感器和驱动器。现有的传统连接技术(如FlexRay和CAN)通常要求在网关中实现协议转换,这可能导致成本、复杂性和延时增加。现有的汽车以太网技术(如100BASE-T1)需要使用点对点交换连接,无法满足支持终端连接应用向以太网过渡的系统成本要求。
10BASE-T1S提供缺失的链接,通过优化的以太网到边缘连接支持这种过渡。在这个部署过程中,仍然需要克服一些问题,例如以太网连接会增加模块实施方案的元件成本和复杂性。10BASE-T1S通过降低系统成本,以及提供多种支持不同类型的信号链分区的产品选择来解决这些问题。
一、10BASE-T1S 介绍
IEEE开发了以太网标准的一种新变体,它在单对物理层上提供10Mbit/s的带宽。这一规范被称为IEEE Std 802.3cg-2019,并于2020年初发布。它主要包括两个协议标准:10Base-T1L和10Base-T1S。
10Base-T1L是10Mbit/s的SPE(Single Pair Ethernet)的远距离变体,允许电缆长度达到1000米。这种点对点的变体可应用于卡车、火车和其他车辆技术,也可用于工业4.0。通过该协议,可以打破在工厂执行一线服务的基本操作设备(传感器、阀门、执行器和控制器)与实现新型智能工厂所需的智能企业数据、比特和字节库之间的障碍。然而,对于汽车应用而言,这种变体并不适用。
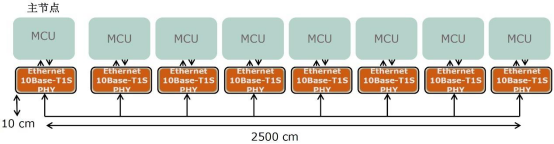
10Base-T1S提供端到端的短距离全双工传输,或者是半双工的多对多传输,适用于汽车应用。10BASE-T1S与其他汽车以太网技术的不同之处在于,它支持多点拓扑结构,所有节点都通过同一对非屏蔽双绞线连接。这种总线配置提供了一个优化的BOM(Bill of Materials),只需在每个节点上部署一个以太网PHY,而无需采用与其他以太网技术相关的交换机或星型拓扑。该标准规定必须支持至少8个节点(可以支持更多节点),总线长度必须达到25米。
10Baes-T1S 总线式以太网
在使用10BASE-T1S总线拓扑时,需要特别关注服务质量,因此采用了一种称为物理层冲突规避(PLCA)的轮询机制。PLCA的目的是避免共享网络上的冲突,不像FlexRay中使用固定调度会浪费未使用的传输时隙,相比CAN系列规范,PLCA使用了更高的带宽利用率。
PLCA是对CSMA/CD的扩展,其目标是改进以太网在多分叉(总线)拓扑结构上现有碰撞检测机制(CSMA/CD)在吞吐量、延迟和公平性方面的表现。这种仲裁纯粹在物理层进行,MAC在以下描述的过程中不承担任何作用。启动PLCA后,只有具有传输机会的物理层设备被允许发送数据。传输机会以循环方式分配。每个物理层设备可以在其传输机会期间发送信息帧。当主节点发送信标时,新的周期开始。
PLCA 循环示例
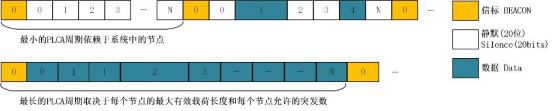
在PLCA系统中,每个物理层设备(PHY)都被分配一个独一无二的PHY ID,范围从0到255。PHY ID为0的设备是PLCA协调器。每个PHY设备都知道系统中PHY设备的数量。PLCA采用轮询方案,每个轮次由PLCA协调器发送一个信标(BEACON)来触发。在PLCA方案中,每个参与者(包括协调器)按照PHY ID的顺序,在信标之后都有一个发送机会。
如果一个节点没有待发送的数据,系统中的下一个PHY设备将在超时时间后获得机会。如果节点有待传输的数据,允许在其传输机会内开始传输帧。如果系统配置允许,节点还可以进行突发传输,即发送多个帧,每个消息的有效载荷长度可以不同。
这种调度方案避免了总线冲突和重传,降低了带宽的使用,并保证了系统内传输机会的公平性。实践中观察到两个节点之间的往返延迟小于半毫秒,在使用iperf3工具测量IP网络上的最大可实现带宽时,几乎可以达到10Mbit/s的全速。在这种PLCA机制的基础上,可以在MAC层启用CBS或TAS等功能。
目前,数据线传输功率(PoDL)的传输尚未完全标准化,但已有一些工作组在研究和制定相关标准。IEEE正在扩展802.3cg规范,其中包括添加PoDL功能。10BASE-T1S的物理层是交流耦合的,因此可以为远程设备提供电力。
10BASE-T1S主要具有以下五个特点:多点物理层、无冲突、高效的带宽利用、确定性和低延迟、安全机制。基于这些特点,10BASE-T1S非常适用于传统汽车网络中的各种应用场景。
二、10BASE-T1S 与CAN-XL 对比
降低系统复杂性和成本一直是合理的诉求。从长远来看,由于以太网完全覆盖了FlexRay和MOST的应用领域,因此FlexRay和MOST很可能被替换,只保留CAN和以太网。以太网适用于娱乐、ADAS、车联网等系统,工作速率在100~1000Mbit/s之间;而CAN/CAN-FD适用于发动机管理和车身控制等系统,工作速率在0.5~5Mbit/s之间。考虑到车载网络系统中大约90%的控制器节点的通信速率低于10Mbit/s,因此10Mbit/s的通信速率可以满足广泛的应用需求,无论是音频、雷达、超声波传感器还是底盘控制。因此,CAN-XL和以太网10BASE-T1S在这个领域存在竞争关系。
这两种协议的开发都是为了满足新的电子/电气架构要求,并在10Mbit/s的区域提供预期的性能。这两种协议都提供相同的数据速率,允许应用传输更长的有效载荷,并在总线上实现接近10Mbit/s的传输速度。然而,它们的介质访问方案不同。接下来将对它们的数据报效率和总线循环效率进行对比。
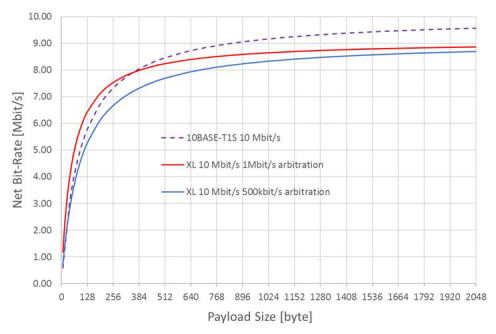
**2.1 **数据报的效率
两种协议在数据报中都有头部和尾部的开销,包括寻址、协议字段和CRC等。在CAN-XL中,仲裁阶段和数据阶段的填充位以及不同的总线速度会进一步影响效率。
通过将开销量与有效负载位上的时间开销相关联,可以绘制出数据报在有效负载上的效率曲线。CAN-XL的仲裁阶段较慢,报头较大,开销较高。以1Mbit/s而不是500kbit/s的速度运行仲裁阶段可以显著提高数据报的效率,特别对于较短的帧来说效果更为显著。
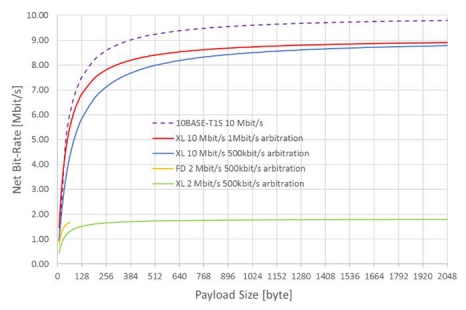
数据报的效率比较
**2.2 **总线循环效率
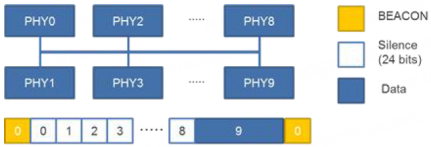
如果我们观察PLCA循环而不是单个数据报,情况将会有所改变。假设系统配置如图所示,并假设只有PHY9有待处理的传输。
PLCA 循环示例
在这种情况下,假设总线保持未使用状态的时间是静默时间(24位)的9倍。另外,考虑到BEACON所需的额外时间,数据传输的效率将会发生变化,具体情况如图所示。
总线循环效率示例
在CAN-XL中,等待任何传输机会不会降低总线效率,但我们仍需要考虑空闲时间和EOF序列。在典型工作条件下,具有512字节有效载荷的情况下,CAN-XL和10Base-T1S两种协议表现出相同的效率。然而,这两种协议的效率取决于具体的用例、系统配置以及是否使用扩展功能。
此外,我们还需要考虑到更高级别协议的可用性以及其他增强功能,例如安全性或电力传输。10Base-T1S和CAN-XL是两种不同的技术,在发布的标准中有一些区别,具体可以参考下表。
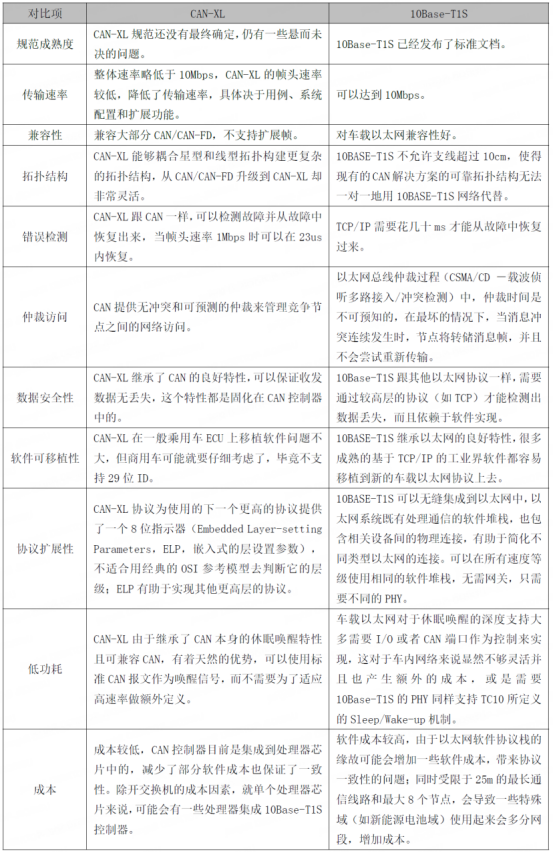
与10BASE-T1S相比,CAN-XL能够耦合星型和线型拓扑,从而构建更复杂的拓扑结构。由于10BASE-T1S不允许支线超过10cm的长度,这导致现有的CAN解决方案的可靠拓扑结构无法直接用10BASE-T1S网络来替代。然而,从CAN/CAN-FD升级到CAN-XL却非常灵活,这得益于在布线和线束方面投入了大量的专业知识和开发时间。正是这种平滑的升级过程,使得关注紧凑型和中型汽车的原始设备制造商(OEM)对采用CAN-XL产生了浓厚的兴趣。CAN-XL在现有车辆架构的基础上提供了一个理想的开发平台,无需重新设计线束、控制器和协议栈。与IP相比,CAN的协议栈更为简单,这使得可以使用体积更小、成本更低的微控制器。CAN-XL的目标之一就是继续保持这一传统优势。
而10BASE-T1可以替代CAN、CAN-FD、LIN、FlexRay或音频等连接,在以太网架构下,可以在任何地方使用相同的软件堆栈和通信机制。只需根据各网络段的特定速度等级更换PHY和线缆。例如,1000BASE-T1用于骨干网络,100BASE-T1用于诊断和软件下载,而10BASE-T1S用于车身和动力传动系统的通信。整个以太网架构无需任何网关,而CAN-XL则需要网关来实现协议转换,这可能会增加成本、复杂性和延迟。在Zonal架构中,10BASE-T1S能够完美匹配。
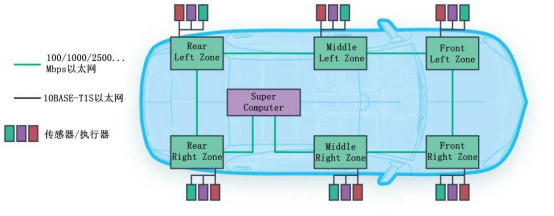
汽车Zonal 架构
10BASE-T1S和CAN-XL各有其优势。这两种协议都有可能在同一个车载网络的不同应用中使用。CAN-XL和10BASE-T1S可以共同提供连接,在基于信号的通信和面向服务的通信之间进行桥接。通过适当扩展协议层,可以为应用程序提供更多的可能性。
审核编辑:汤梓红
-
CAN 与以太网数据交换的研究与分析2009-04-07 472
-
以太网接口10-100Base-T引脚定义2007-12-04 8923
-
以太网10/100Base-T 接口 以太网 100Base2009-02-12 5594
-
布线技巧四:10Base—T/2/5/F/35—以太网2009-04-23 7550
-
力科推出100/10BASE-T以太网解码软件2013-03-13 1938
-
CAN与以太网区别2017-01-21 1251
-
车载以太网和CAN的区别2022-02-05 12071
-
为何10BASE-T1S是汽车通信中缺失的以太网链路2022-08-14 2251
-
以太网笔记:快速以太网100Base-TX接口及编码2023-02-20 13289
-
对垒以太网10BASE-T1S,CAN XL能后来居上么?--CAN XL技术解读2022-08-01 3065
-
单对以太网:如何实现10Base-T1L2023-08-16 2400
-
10 BASE 以太网与CAN-XL有哪些不同点呢?2023-08-09 2842
-
单对以太网:如何实现 10Base-T1L2023-12-06 1721
-
10BASE-T1S车载以太网简介及网络架构2023-12-25 6608
-
车载以太网10BASE-T1S通信解决方案2024-01-10 7326
全部0条评论

快来发表一下你的评论吧 !
