

FANUC机器人TCP三点法介绍
机器人
554人已加入
描述
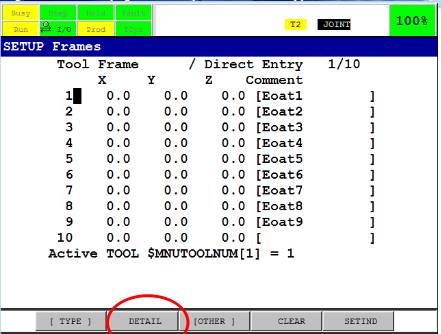
三点法设置方法
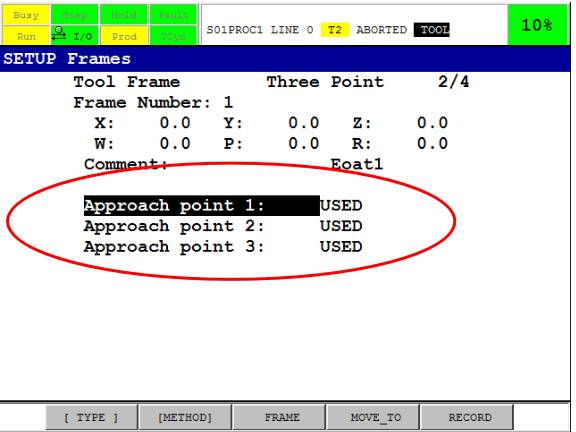
DETAIL–METHOD–回车进入三点法界面:
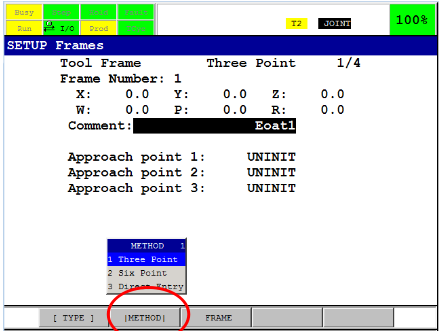
三点法操作步骤:
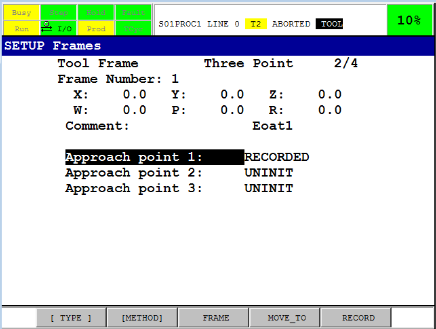
记录接近点1
a.移动光标到接近点1(Approachpoint1);
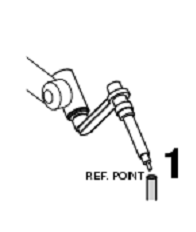
b.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
c.按【SHIFT】+F5【RECORD】(位置记录)记录
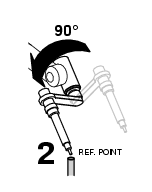
记录接近点2
a.移动光标到接近点2(Approachpoint2);
b.把示教坐标切换成关节坐标(JOINT),旋转J6轴(法兰面)至少90度,不要超过360度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,使工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
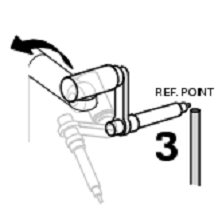
记录接近点3
a.移动光标到接近点3(Approachpoint3);
b.把示教坐标切换成关节坐标(JOINT),旋转J4轴和J5轴,不要超过90度;
c.把示教坐标切换成全局坐标(WORLD)后移动机器人,工具尖端接触到基准点;
d.按【SHIFT】+F5【RECORD】(位置记录)记录;
当三个点记录完成,新的工具坐标系被自动计算生成.Point1-3显示成USED,如下图所示:
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
FANUC 工业机器人编程与联网相关资料推荐2021-07-02 1721
-
FANUC机器人TCP三点法2021-01-04 8618
-
采用视觉一点法计算TCP2020-12-26 1216
-
轻松掌握FANUC机器人编程 维护与外围集成2020-06-10 3821
-
FANUC机器人的功能位列表的资料说明2020-04-29 1358
-
24个FANUC机器人的视觉功能详细介绍2020-04-12 10506
-
FANUC机器人的详细使用教程免费下载2018-12-13 2175
-
电阻测试:四点法与两点法的原理与差异(简单)2017-11-27 5971
-
工业机器人TCP的含义和TCP类型的介绍2017-09-19 10975
-
MPPT算法之三点跟踪法2017-01-10 12473
-
KUKA机器人TCP(工具中心点)设定2015-12-23 2288
-
简易DIY——太阳能卫星陀螺机器人2015-03-05 5071
-
先行分离直行运动误差的二次相移三点法2009-07-17 831
-
用三点法实现机器人三维位置测量的研究2009-07-06 527
全部0条评论

快来发表一下你的评论吧 !
