

N32L40XCL-STB开发板模块之UART评测
电子说
描述
1.本章内容
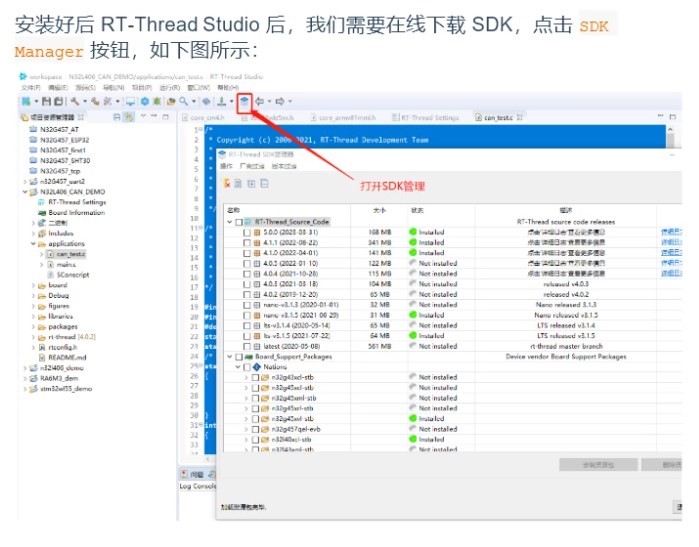
本章通过RT-Thread Studio配置片上外设UART的功能,实现开发板和PC进行通信。
2.模块介绍
通用同步异步收发器(USART)是一种全双工串行数据交换接口,支持同步或异步通信。可灵活配置,以便于与多种外部设备进行全双工数据交换。
N32L40XCL芯片共有5个板载串口,其中串口具备的功能如下:
支持全双工通信
支持单线半双工通信
波特率可配置,最高波特率可达 2Mbit/s
支持 8bit 或 9bit 数据帧
支持 1bit 或 2bit 停止位
支持硬件生成校验位及校验位检查
支持硬件流控: RTS、CTS
支持 DMA 收发
支持多处理器通信:如果地址不匹配,则进入静默模式, 可通过空闲总线检测或地址标识唤醒
支持同步模式,允许用户在主模式下控制双向同步串行通信
支持智能卡异步协议,符合 ISO7816-3 标准
支持串行红外协议(IrDA SIR)编码与解码,提供正常与低功耗两种运行模式
支持 LIN 模式
支持多钟错误检测:数据溢出错误、帧错误、噪声错误、检验错误
支持多个中断请求:发送数据寄存器为空、CTS 标志、发送完成、数据已接收、数据溢出、总线空闲、检验错误、LIN 模式断开帧检测、以及多缓冲区通信中的噪声标志/溢出错误/帧错误
3.开发软件
开发板:N32L40XCL-STB V1.0
开发环境:RT-Thread Studio V2.2.3
RT-Thread版本:V4.0.1
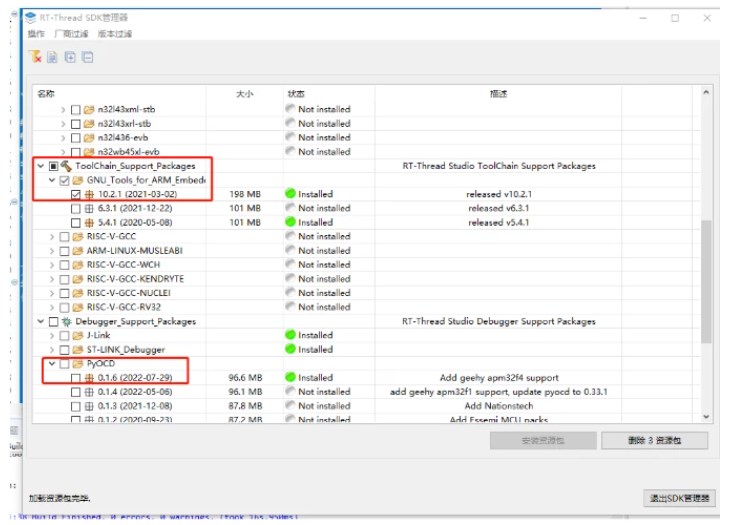
下载工具:DAP-LINK(pyocd V0.1.6)
4.步骤说明
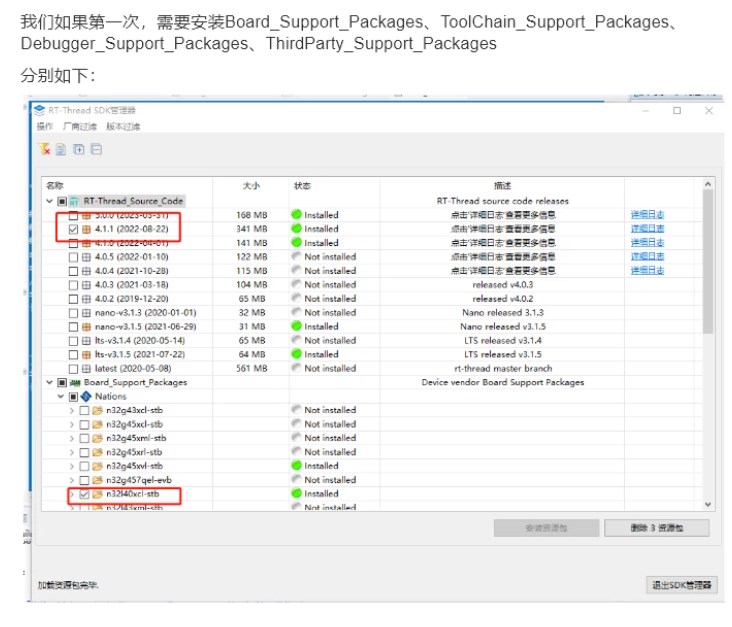
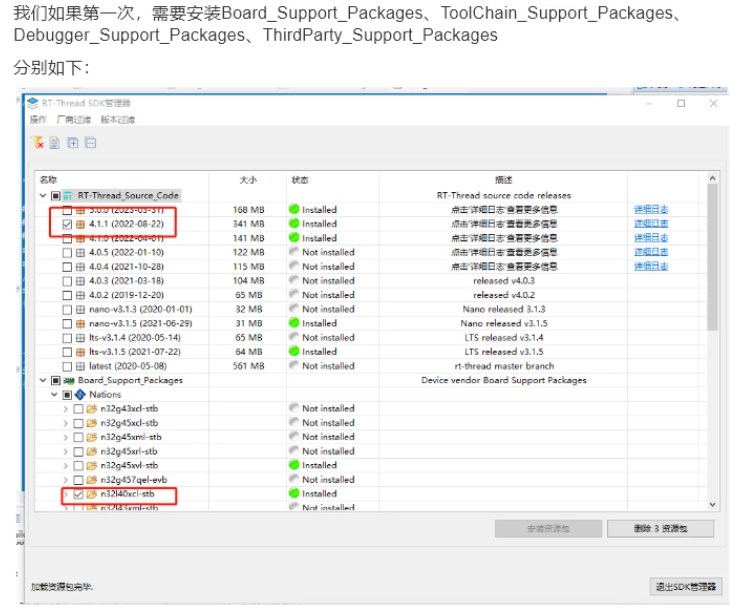
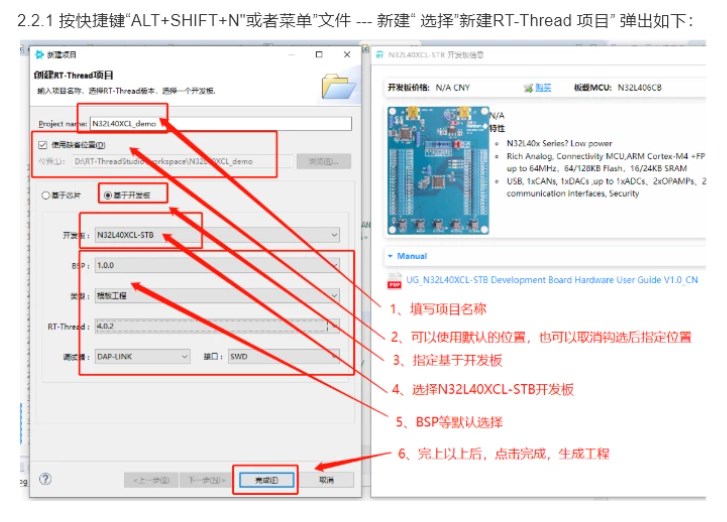
4.1新建工程

【注】N32L40XCL-STB这板开发板,如果用板载的DAP-LINK下载,会报pyocd会报找不到.pyack包的错误。
4.2编写测试程序
4.2.1建好工程后,双击“RTThread Settings”

4.2.2使能我们要使用的串口,由于串口1是用做RT-Thread的终端输出这里我们选择串口2(PA2-TX/PA3-RX)
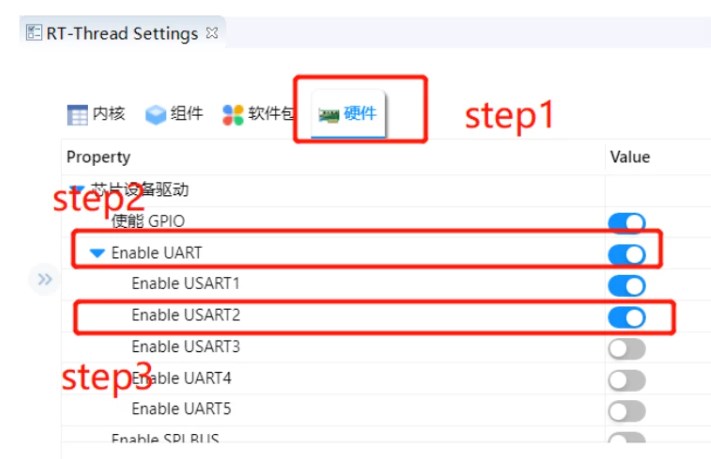
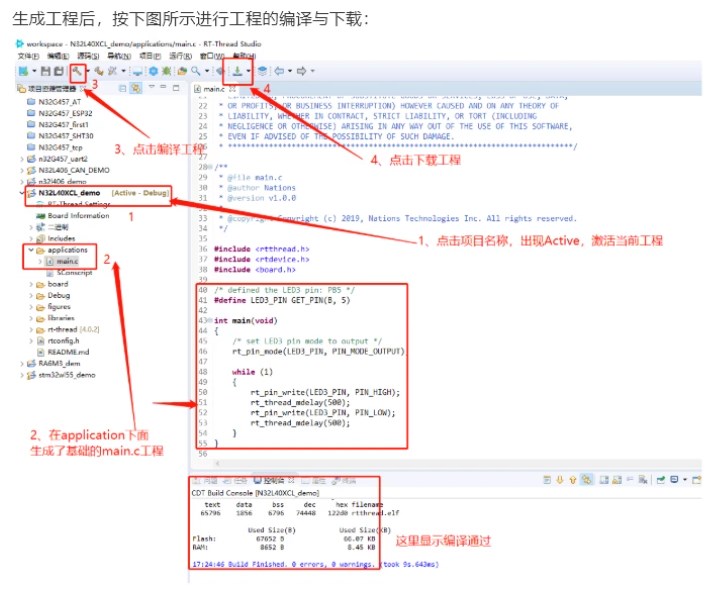
以上2步完成后,就是完成了最基本的配置,进行编译
进行编写代码测试
4.2.3 宏定义我们要用到的LED及串口
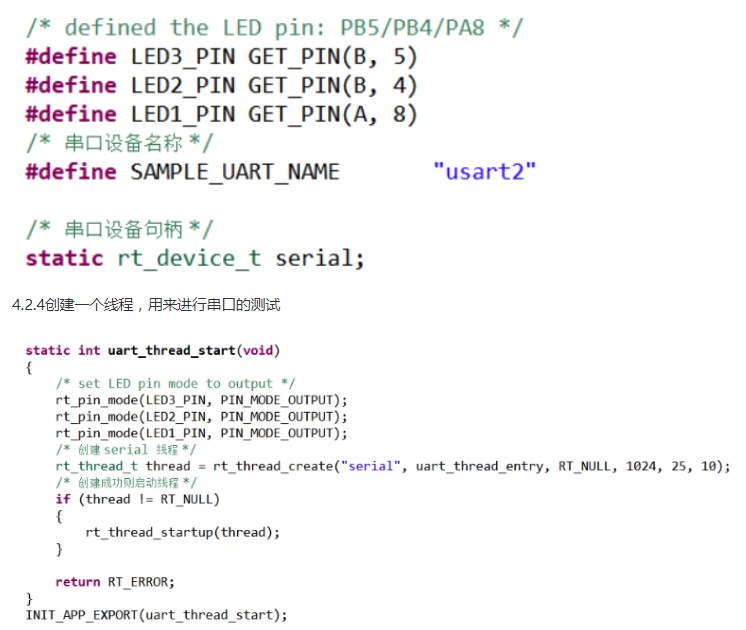
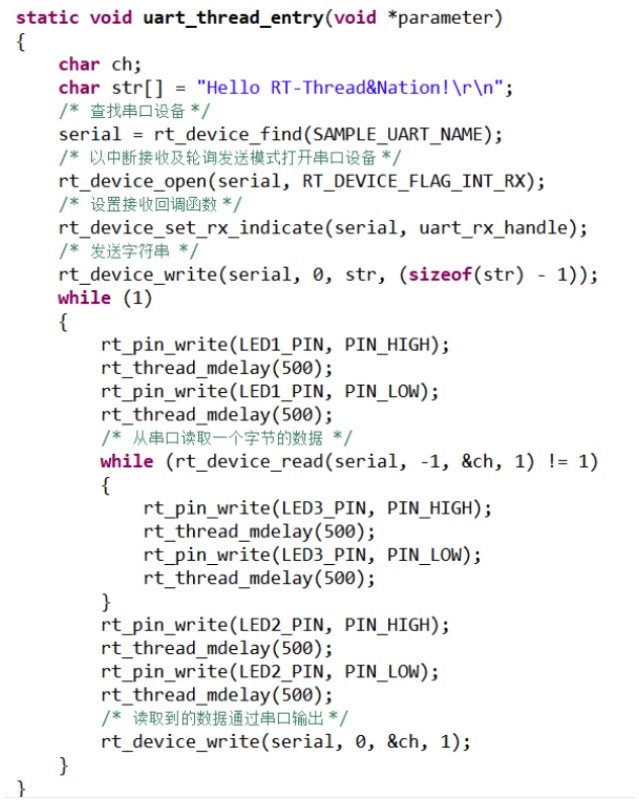
4.2.5进行串口测试代码的编写
.1初始化完成后,串口打印语句“Hello RT-Thread&Nation!”
.2等待读取数据时,LED3(绿灯)闪烁;
.3读取到数据时,LED2(蓝灯)闪烁;
.4数据发送完成时,LED1(红灯)闪烁
-
N32L40XCL-STB开发板模块评测任务大挑战-测试CAN2023-08-16 2397
-
N32L40XCL-STB开发板模块评测任务大挑战之UART2023-08-09 1918
-
N32L40XCL-STB 开发板模块评测任务大挑战2023-03-28 1870
-
N32G45XCL-STB (LQFP48) 开发板2022-11-10 525
-
国民技术N32G45XCL-STB开发板资料2022-11-07 664
-
N32L40XCL-STB开发板硬件使用手册2022-11-02 931
-
国民技术N32G45XCL-STB_(LQFP48)_开发板2022-10-18 560
全部0条评论

快来发表一下你的评论吧 !
