

基于pid控制方法的操控遥控飞机实例
描述
做控制时,大家经常会有这样的感受“代码很丰满,现实很骨感”,这是因为将计算机指令转移到实际硬件时,由于物体的惯性以及各种非理想化的因素影响,往往会出现实际与预期不符合的情况。
这篇文章将以“操控遥控飞机从地面飞到10米高度并悬停”为例子,用最通俗易懂的方式,让你理解PID。在这个问题中,我们假设加速度是可以直接调控的(实际生活中往往也是这样),因此,我们输入的量为加速度的大小和方向(正负),而我们最终想要得到的结果就是高度稳定在10米。
首先我们来讲控制方法:
控制方法主要分为“开环控制”和“闭环控制”,这两种控制方法的简单理解为:
开环控制:计算出飞机从地面到10米高度所需要的加速度以及作用时间,然后将其编写为一条固定的指令,“一次执行,全过程受益”。
闭环控制:在飞机飞行的过程中,系统时刻关注飞机的状态,并做出相应的调整。而PID控制就是最常用的闭环控制。
PID原理
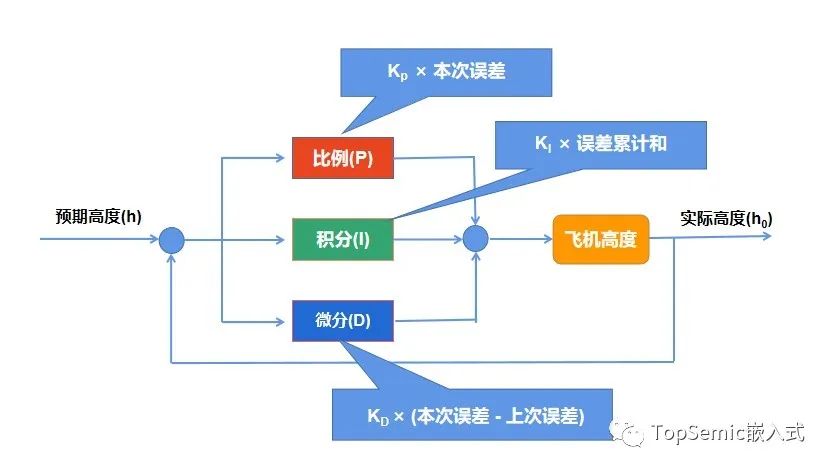
一讲到原理,很多人都会搬出PID公式,数学较好或者学过自控的人还好,要是遇见一个半路转行做控制的,看见“微分”和“积分”,头都大了。其实,由于生活中信号采样具有一定的间隔,因此我们经常遇见的都是离散信号的控制,只需要读懂下图即可:
实践出真知(python实现PID)
3.1 导入包
`import time` `import matplotlib.pyplot as plt`
3.2 PID实现
# 实现一个PID控制器 class PIDController: def __init__(self, kp, ki, kd): """ 初始化PID控制器 参数: kp (float): 比例系数 ki (float): 积分系数 kd (float): 微分系数 """ self.kp = kp # 比例系数 self.ki = ki # 积分系数 self.kd = kd # 微分系数 self.prev_error = 0 # 上一次的误差 self.integral = 0 # 误差积分值 def calculate(self, setpoint, current_value): """ 计算PID控制器的输出 参数: setpoint (float): 设定值(目标值) current_value (float): 当前值(被控制的系统当前状态) 返回: output (float): 控制器的输出 """ error = setpoint - current_value # 计算误差 self.integral += error # 更新误差积分 derivative = error - self.prev_error # 计算误差导数 output = self.kp * error + self.ki * self.integral + self.kd * derivative # 计算控制输出,包括比例、积分和微分部分 self.prev_error = error # 保存当前误差作为下一步的上一次误差 return output # 返回控制器的输出
3.3 飞行器模拟
#飞行器模拟 class AircraftSimulator: def __init__(self): self.height = 0 # 飞行器初始高度为0 self.velocity = 0 # 飞行器初始速度为0 def update(self, throttle, time_step): """ 更新飞行器状态:高度和速度 参数: throttle (float): 油门输入,控制引擎输出的力量 time_step (float): 时间步长,模拟器更新的时间间隔 """ acceleration = throttle - 0.1 * self.velocity # 根据简化的动力模型计算飞行器的加速度 # 加速度等于油门输入减去速度的一部分,这是简化的模型 self.velocity += acceleration * time_step # 根据加速度更新速度 # 新速度等于当前速度加上加速度乘以时间步长 self.height += self.velocity * time_step # 根据速度更新飞行器的高度 # 新高度等于当前高度加上速度乘以时间步长
3.4 主函数与绘图
# 主函数
def main():
# PID参数
kp = 5.0
ki = 0.1
kd = 10
# 初始化PID控制器和飞行器模拟
pid_controller = PIDController(kp, ki, kd)
aircraft_simulator = AircraftSimulator()
target_height = 10.0
time_step = 0.1
total_time = 20 # 总模拟时间增加到20秒
current_time = 0.0
# 存储时间和高度数据的列表
time_data = []
height_data = []
# 模拟循环
while current_time < total_time:
# 使用PID控制器计算控制信号
control_signal = pid_controller.calculate(target_height, aircraft_simulator.height)
# 添加扰动
disturbance = -1.5
control_signal += disturbance
# 使用控制信号和时间步长更新飞行器模拟
aircraft_simulator.update(control_signal, time_step)
# 存储时间和高度数据
time_data.append(current_time)
height_data.append(aircraft_simulator.height)
current_time += time_step
time.sleep(time_step) # 添加时间延迟以模拟实时行为
print("Simulation completed.")
# 绘图
plt.plot(time_data, height_data, label='Height')
plt.axhline(y=target_height, color='r', linestyle='--', label='Target Height')
plt.xlabel('Time (s)')
plt.ylabel('Height (m)')
plt.title('Aircraft Height Control with Random Disturbance')
plt.legend()
plt.grid(True)
plt.show()
if __name__ == "__main__":
main()
实验与参数理解
PID的控制经常会涉及到KP、KI、KD三个参数的调节,如果盲目调节则会花较长时间,接下来我们将用直观实验来理解以下几个参数的具体含义。
4.1 比例环节
计算公式为KP × 误差,具体的含义即为误差越大,值越大。这一点是非常直观的,误差越大则说明偏离预期值越远,我们要加大“油门”,快速调整!以下是当KI、KD为0,只有KP=5的测试结果:
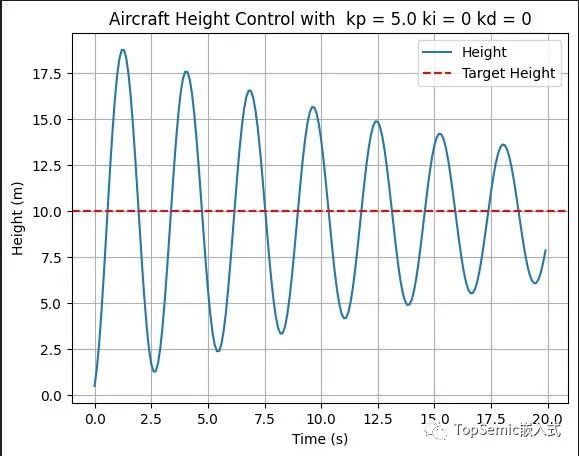
从图中我们可以看到虽然慢慢的想10收敛,但由于误差越大,其“油门”越大,就像是一个“莽夫”,尽管每次都在调整,但总是用力过猛!
4.2 微分环节
计算公式为KD × (本次误差 - 上次误差),对于这个公式,我们可以理解为用来中和“用力过猛”。以下是当KP=5、KD=10、KI=0的测试结果:
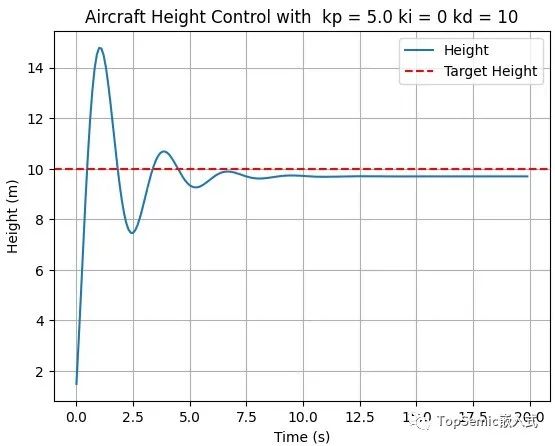
显然,这个结果要比上次好很多,但始终低于10,这是因为我们在模拟中加入了一个干扰条件:
# 添加扰动 disturbance = -1.5 control_signal += disturbance
因此,要想消除这个干扰,就需要积分环节的加入。
4.3 积分环节
积分环节的公式为KI × 误差累计和,用官方的语言来说,用来调整“稳态误差”,其实,所谓的稳态误差就可以理解为“一直存在的误差”,也就是在本次实验中加入的持续干扰!以下是当KP=5、KD=10、KI=0.1的测试结果:
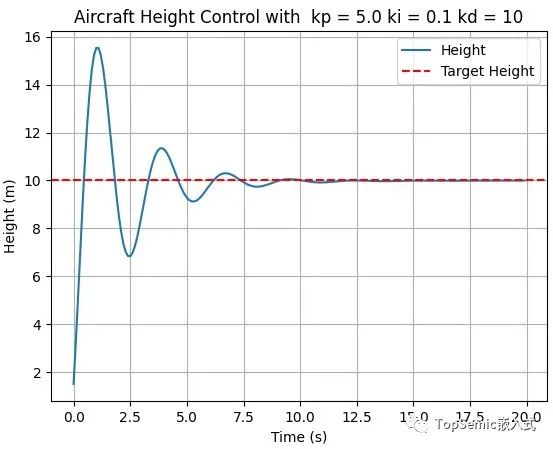
从这次的测试中,我们看出,得到了几乎完美的结果!
总结
对于PID参数调节,认准3个点:
P:大力出奇迹
I:消除持续存在的误差
D:“中和”用力过猛,减少波动
责任编辑:彭菁
-
怎样用一个遥控控制两个飞机2010-01-26 4128
-
新人求教无线遥控飞机2013-04-15 5736
-
基于SLH89F5162的鱼鹰遥控飞机设计2013-10-29 2040
-
PID温度控制实例2015-08-27 38950
-
遥控飞机是怎样控制平衡的2017-02-16 6963
-
PID控制方法有哪些2021-07-01 1602
-
基于Arduino控制器制作一个漂亮的遥控飞机2022-08-23 2740
-
基于模糊PID控制的飞机液压缸性能测试2009-08-28 602
-
智能PID控制方法综述2016-04-01 736
-
PID控制原理及编程方法2016-11-17 1089
-
控制温度PID实例2022-05-13 1084
-
PID控制最通俗的解释与PID参数的整定方法2017-01-04 2433
-
基于PID控制原理及编程方法2017-10-15 1445
-
PID操控的原理和特征说明2020-04-04 3679
-
2.4g芯片开发的玩具遥控飞机解决方案2023-08-03 3806
全部0条评论

快来发表一下你的评论吧 !
