

为什么dsp非常适合物联网设备使用 为什么DSP与RTOS很匹配?
物联网
描述
随着基础网络的全面覆盖,物联网(IOT)得到了快速的发展,而物联网终端设备也越来越多。
本文就来聊聊搭载RTOS的新一代混合型DSP技术,是物联网的最佳选择。
DSP技术演进
DSP被用来转换和处理现实世界中的模拟信号,这种处理操作是通过复杂的信号处理算法来完成的。作为上世纪80年代就出现的技术,DSP在硬件功能和软件开发工具以及基础设施方面,已取得很大发展。早年的算法是用汇编语言编程到DSP上的。随着DSP市场的扩大以及算法变得越来越复杂,其架构也在不断发展,并促进了高级语言编译器的开发。
带嵌入式DSP内核的芯片,一般都集成有片内存储器,其大小通常足以容纳执行专用任务所需的整套程序。新一代DSP应用范围涵盖了音频/语音处理、图像处理、电信信号处理、传感器数据处理和系统控制等。而如今的物联网市场,则几乎覆盖了之前众多用例的各种组合。行业分析公司Markets and Markets预计,到2027年,全球物联网技术市场规模将增长到5664亿美元。面对如此庞大的物联网市场,新一代的DSP技术至关重要。
为什么DSP非常适合物联网设备?
物联网通过使用不同类型的传感器收集数据,实现现实世界中万物间的通信和连接。DSP对来自传感器的连续变化信号进行分析和处理。如今,已出现传感器hub DSP(如CEVA-SensPro2),就是用来处理和融合多个传感器信息的,并用于上下文感知的神经网络推理。DSP设计用于分析和处理音视频、温度、压力或湿度等现实世界中的各类信号,其任务涉及精确和准确的实时重复数字计算。随着物联网市场的增长,越来越多的传感器得到部署,收集到的所有数据都需要得到高效的实时处理。如今越来越清晰的迹象表明,数据处理需要在物联网设备上直接进行,而不是将其发送到云端进行处理。
目前正在发生的另一个事关物联网设备的趋势是,越来越多地使用基于人工智能(AI)的算法完成数据的本地化处理。人工智能算法基于神经网络模型,需要高水平的并行能力才能有效执行。并行计算能力是DSP优于通用中央处理器(CPU)的一个关键优势。为了满足这一要求,现代DSP架构倾向于使用宽向量和单指令多数据(SIMD)功能。
简而言之,基于DSP的强大解决方案,可以同时满足现代物联网设备的高性能计算和低功耗需求。
为什么DSP与RTOS很匹配?
正如DSP是一种专用处理器一样,RTOS也是一种专用操作系统。DSP致力于极其快速和可靠地处理现实世界的数据,而RTOS则致力于可靠地满足响应/反应时间方面的特定时序要求。DSP与通用CPU相比更紧凑,RTOS与常规操作系统相比也是如此。这些特性完全符合物联网设备的需求,因而使得DSP和RTOS成为物联网应用的理想之选。
从历史上看,嵌入式设备一般会利用一个专门用途、通常为8位或16位的微控制器,可以在没有RTOS的情况下工作。但如今的物联网设备更加复杂,需要一个32位CPU与带有RTOS的DSP相结合,来管理控制功能,并运行复杂的信号处理。
但问题是,新一代DSP是否足以同时完成物联网设备的信号处理和控制功能?答案是肯定的。一种能够提供面向DSP功能和面向控制器功能的混合DSP架构,正在迅速被物联网和其他嵌入式设备所采用。这种混合DSP具有支持超低指令字(VLIW)架构实现、单指令多数据(SIMD)操作、单精度浮点运算、紧凑的代码规模、全RTOS、超快速上下文切换、动态分支预测等特点,从而设备上不再需要额外的处理器来运行RTOS。
面向DSP的RTOS
基于DSP的RTOS旨在充分利用DSP的高性能特性。它是一个先占式、基于优先级的多任务操作系统,可提供非常低的中断延迟。这类RTOS附带驱动程序、应用程序编程接口(API)、以及为DSP芯片定制的DSP功能运行芯片支持库(CSL)。所有片上外设都可以被控制,比如高速缓存、直接内存访问(DMA)、定时器、中断单元等。因此,物联网应用程序开发人员能够轻松地配置RTOS,从而高效处理资源请求和管理系统。
RT-Thread是一款专为物联网设备优化的开源RTOS,资源占用率极低、可靠性高、可扩展性强。RT-Thread得到物联网设备所需丰富的中间件、硬件以及软件生态系统的广泛支持。
RT-Thread支持GCC、Keil、IAR等所有主流编译工具,支持POSIX、CMSIS、C++应用环境、以及Micropython、Javascript等多种标准接口。
RT-Thread还为所有主流CPU和DSP架构提供强大的支持。通过RTOS消息传递线程间的通信和同步、信号旗语等业务可得到始终如一的高效处理。
目前,RT-Thread有两个版本。一个是用于资源丰富的物联网设备的标准版,而另一个则为Nano版,用于资源受限的系统。
DSP与RT-Thread的完美结合
某些DSP(如CEVA DSP)架构设计,原生就支持RTOS功能和超快速上下文切换,因此使用CEVA DSP和RT-Thread RTOS实现的物联网设备,可以不中断RTOS,同时处理不同资源之间的多种通信任务。例如,多核通信接口(MCCI)机制支持内核之间的命令通信和消息传递。内核之间的通信是通过使用AXI从端口直接访问专用命令寄存器来实现的。DSP有专门的控制和指令,可以通过MCCI跟踪通信的状态。
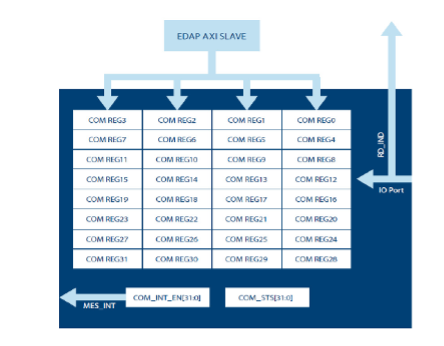
图1:多核通信接口架构。(来源:CEVA)
通过使用均为32位的MCCI_NUM专用命令寄存器来执行内核之间的消息传递。32位COM_REGx寄存器由外部内核通过AXI从端口写入,内核只能读取。对于128位AXI总线,命令生成内核可以同时写入的寄存器多达四个,而对于256位AXI总线,该数目则增至八个。
当生成命令的内核将命令输出到COM_REGx时,寻址寄存器将会被更新,COM_STS寄存器中的相关状态位也会被更新。此外,中断(MES_INT)将被确认以通知接收内核。
当接收内核读取其中一个COM_REGx寄存器后,会向发起方发送一个读取指示信号。读取指示信号由接收内核使用专用的RD_IND(读取指示)MCCI_NUM位总线接口发送。RD_IND总线的每一位分别表示来自其中一个COM_REGx寄存器的读取操作。利用IO接口,接收内核一次只能读取一个COM_REGx寄存器。这样不仅使不同内核间同步变得更简单,而且使同一内核中不同任务间的同步也变得更为容易。
编辑:黄飞
-
运行RTOS的高级DSP是物联网更理想的选择2022-07-14 2302
-
为您的物联网设计选择适合的无线连接技术2014-08-21 5443
-
【WRTnode2R申请】物联网设备联机控制2015-09-10 2158
-
架构到RTOS 详解DSP和MCU的区别和联系2017-02-20 3006
-
自恢复保险丝在物联网传感器的保护应用2017-04-20 2502
-
物联网卡适合哪些行业使用?哪些行业需要物联网卡?2018-02-12 5667
-
在DSP上使用RTOS,怎么添加.cmd文件2018-06-21 2215
-
基于深度学习的物联网前端设备2019-07-19 2311
-
嵌入式Linux和RTOS哪一个更适合物联网呢2021-11-04 1753
-
DSP入门资料(精华)2016-07-13 485
-
基于DSP平台的景象匹配算法评估环境2017-10-19 1001
-
RTOS:物联网设备的基础和第一道防线2022-08-24 1167
-
为什么 DSP 非常适合物联网设备2022-09-15 1167
-
为什么dsp非常适合物联网设备呢2023-08-05 1300
-
dsp是什么意思 dsp怎么调音质最好2024-01-31 17810
全部0条评论

快来发表一下你的评论吧 !
