

玩转先楫CANFD外设系列之一:轻松搞起CANFD
描述
一、概述
先楫的CANFD外设,有两个CANFD的IP,其中HPM6700系列,HPM6400系列、HPM6300系列使用的是CAN,包括了经典CAN和CANFD。而HPM6200系列则使用的MCAN系列,同样也包括了经典CAN和CANFD。两个CANFD有所差异,hpm_sdk也分为了两个驱动文件,但基本的操作接口保持一致。
本文阐述HPM6700系列,HPM6400系列、HPM6300系列的CAN,这里就统称为CAN。MCAN部分后续文章阐述。
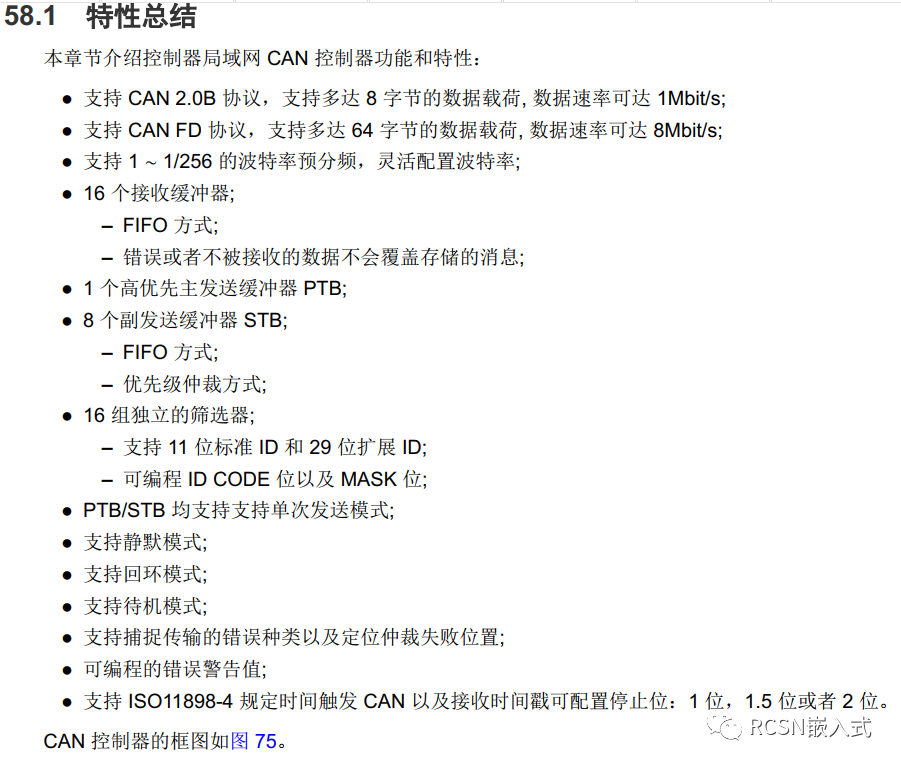
先楫的CAN外设功能比较丰富,比如涉及到各种CAN模式、CAN错误警告提示、时间戳等等。可以看看手册CAN特征描述。
本文主要介绍CAN的基础配置(引脚时钟初始化,波特率设置,正常模式下的收发流程),其他的功能可参考hpm_sdk,后续根据需要也会进行文章阐述。
本文以hpm_sdk的操作接口API为例子,进而介绍CAN的相关知识。
关于更多的CAN/CANFD知识可以访问CIA官网,spec文档可以参考ISO11898-1-2015。本文部分阐述都是基于CIA和ISO的描述参考。
二、实现流程
hpm_sdk中,关于can的例子在samples/drivers/can。使用的板子为hpm6750evk2.
(一)引脚初始化和功能时钟初始化
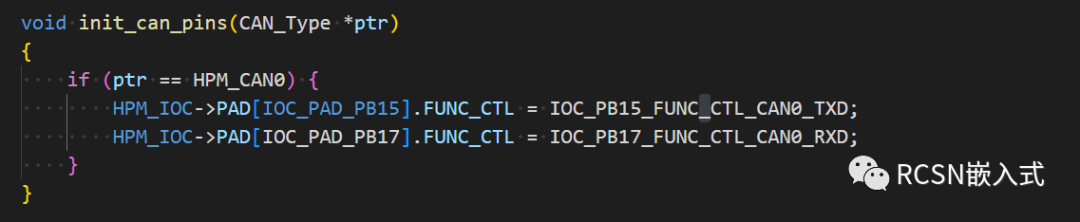
对于CAN的引脚初始化,极其简单,只需要把引脚复用为CAN功能即可。参考hpm6750evk2的board中的CAN初始化。参考board_init_can API
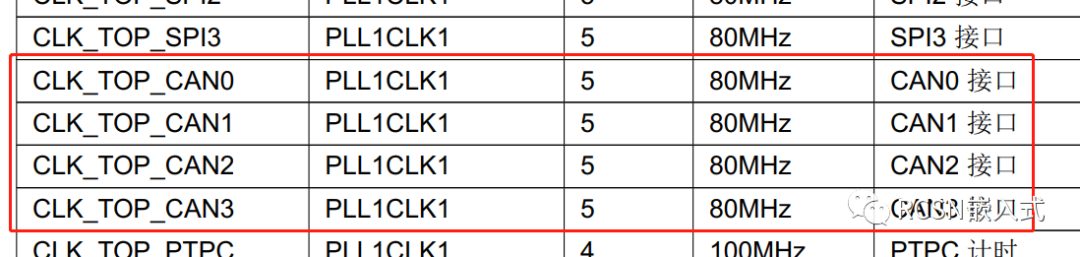
对于CAN功能时钟的开启,在hpm6750手册中,默认时钟由时钟源PLL1_CLK1F五分频得到,PLL1_CLK1为400M,那么CAN的功能时钟就为80M.
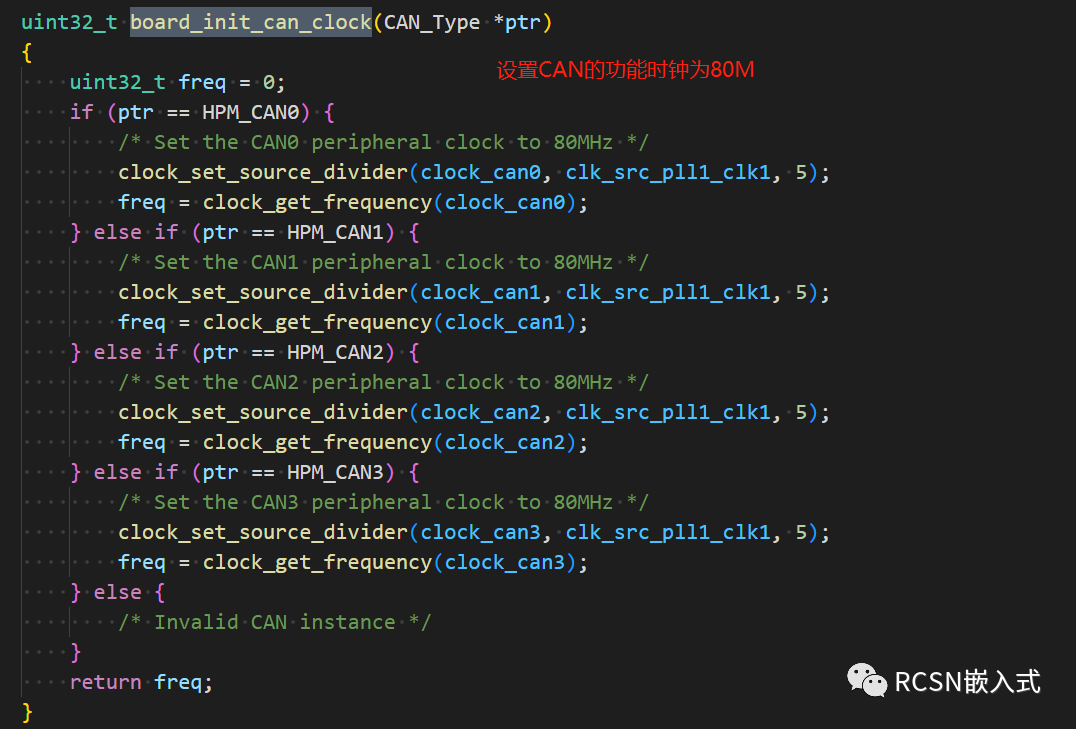
同样sdk当中也做了相关时钟初始化,参考board_init_can_clock API
(二)波特率设置
对于CAN差分信号,这里不做阐述,本文统称的高低电平均为逻辑0和1。
跟uart一样,都是需要每个位的的时间确定,保持双方采样的准确。在CAN的概念中,有一个比较重要的次,BitTime(CAN位时间),这个决定一个bit传输需要的时间,这也决定了波特率。比如一个位传输200ns,那么1S就可以传输100000000(ns)/200(ns) = 5000000bit,也就是5Mbps波特率。
在先楫官方HPM6700_HPM6400_UM手册当中,对于CAN位时间有这么一段描述。
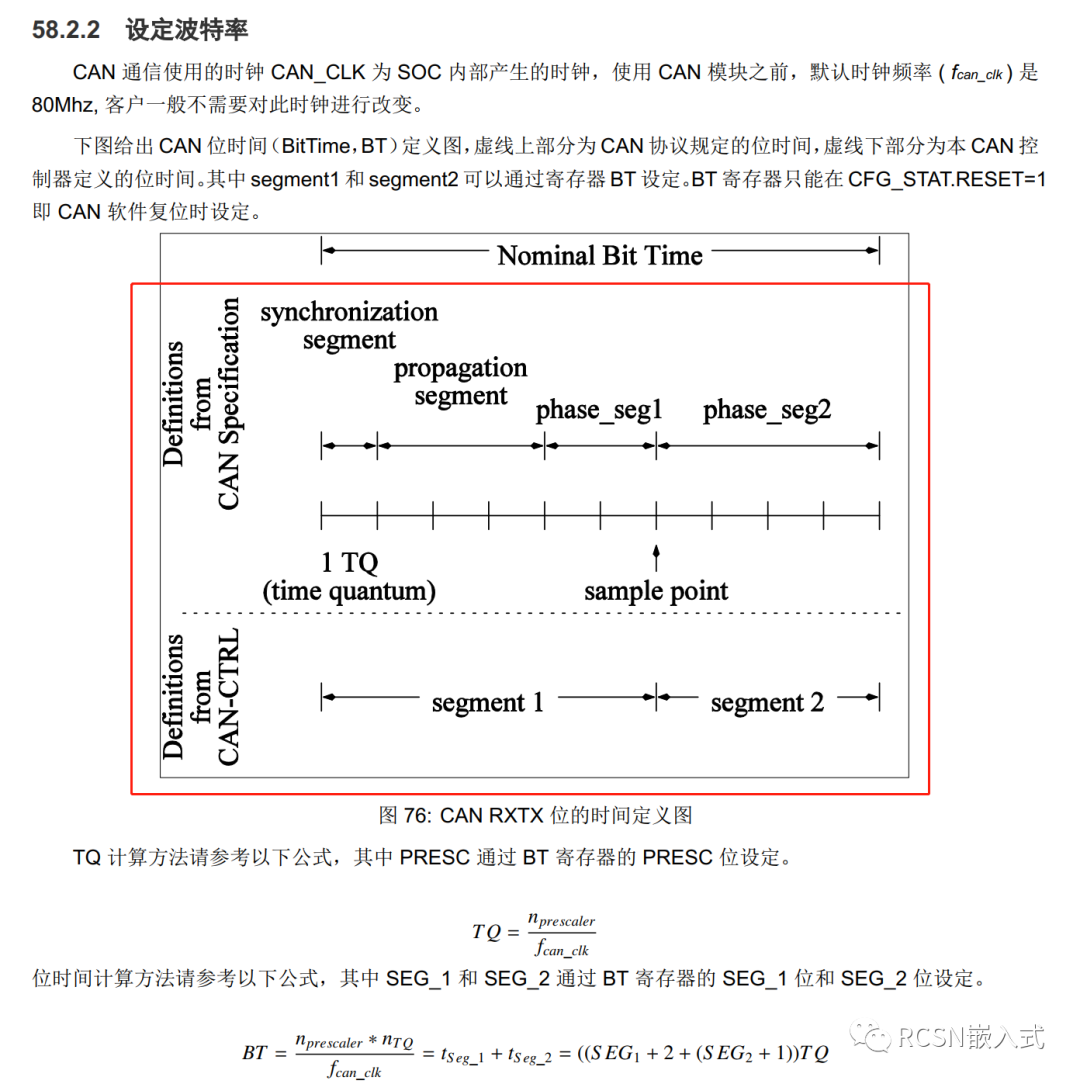
可以看到,一个位时序还包括了Sync_seg、Prop_Seg、Phase_Seg1, Phase_Seg2。Sample point指的是采样点,也就是这段电平保持时间中的采样位置点,比如200ns的位时间,采样点80%,那么就是在160ns中采样决定他是0或者是1。
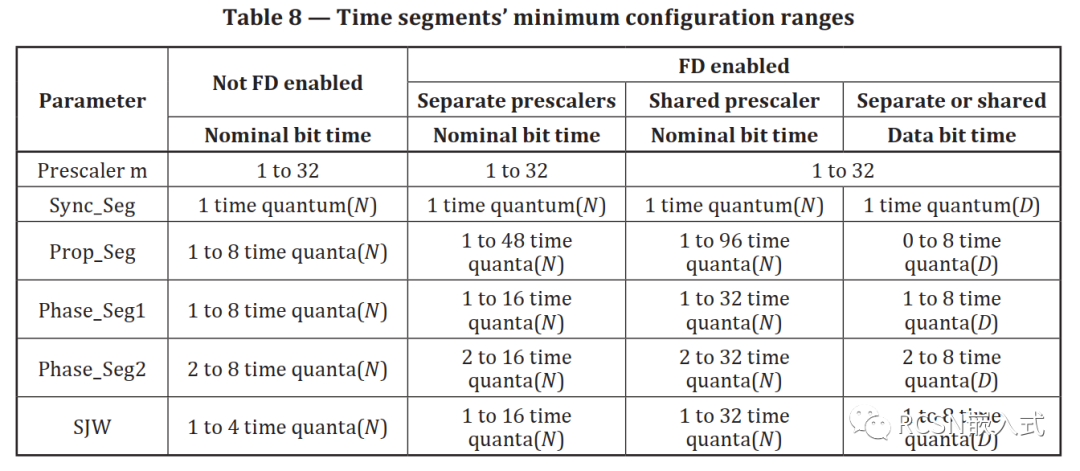
在ISO11898-1:2015中,文档也说明了这部分参数的定义。
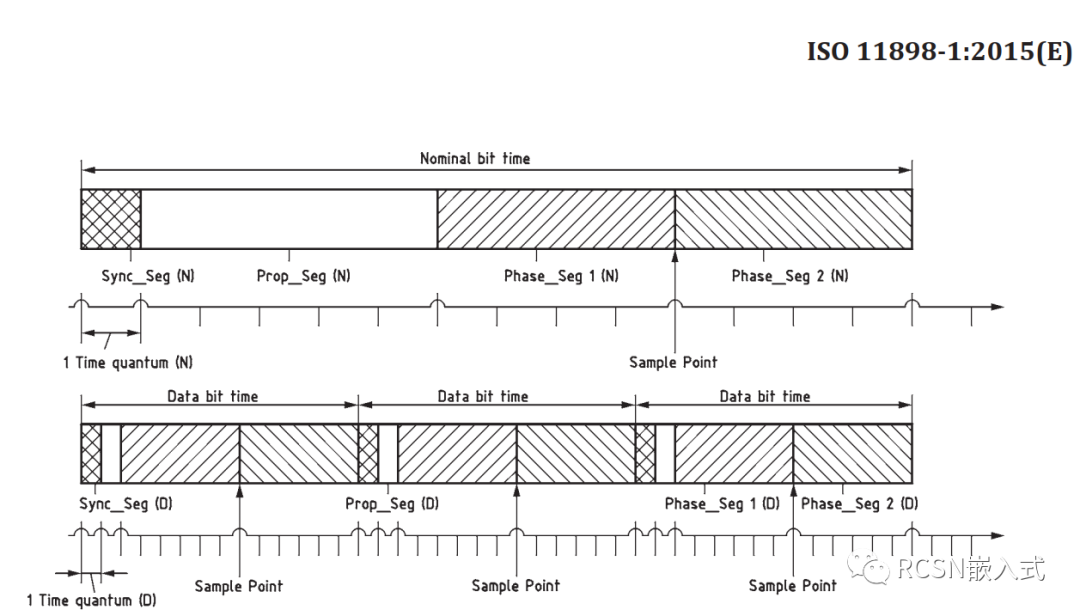
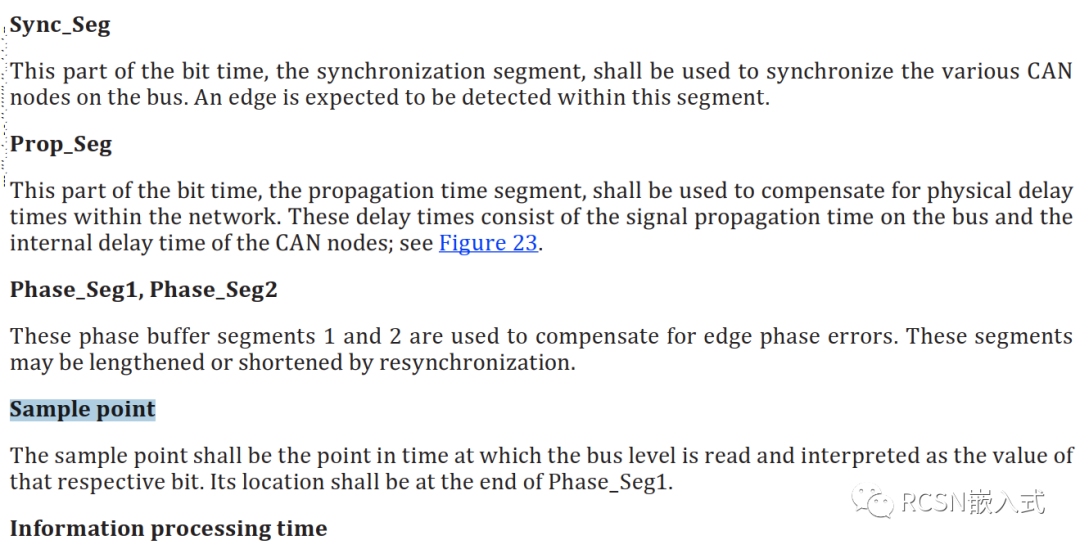
这里比较重要的是Sync_Seg,这部分的位时间指的是同步段,用来同步CAN总线的节点,若检测到的跳变沿被包含在此段的范围内,那么时序就是同步的,采样点sample_point采样到的电平就是该位的电平。上述可知道,该段的时间固定为1TQ,其他段时间均是相位的缓冲段,补偿边沿阶段的误差,保证位电平的稳定和重新同步。具体可看ISO文档解释。
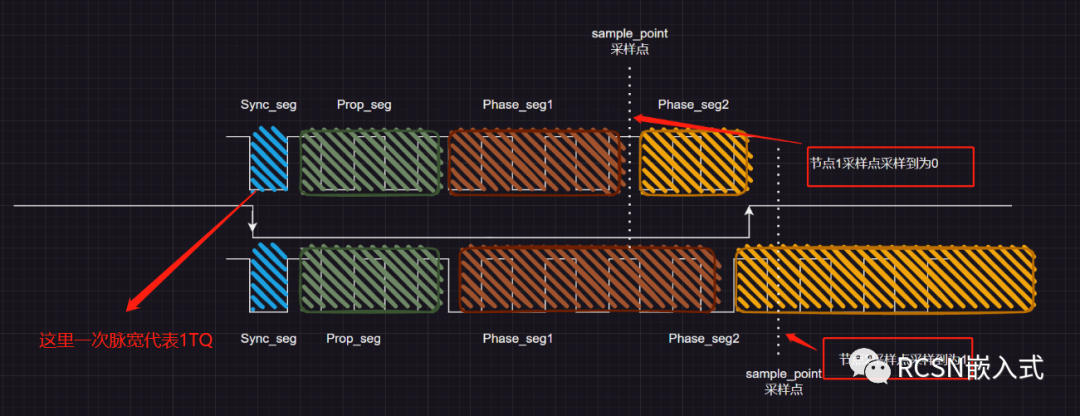
如果两个节点位时间不同(各个位段时间不同),也就如果波特率不一样或者差别到一定程度(CAN的波特率有一定的范围,只要能保证采样点的位置大致相同),那么采样到的数据也有可能不一样。所以对于位时间的各个段的参数需要保持一致,以便通信同步一致。
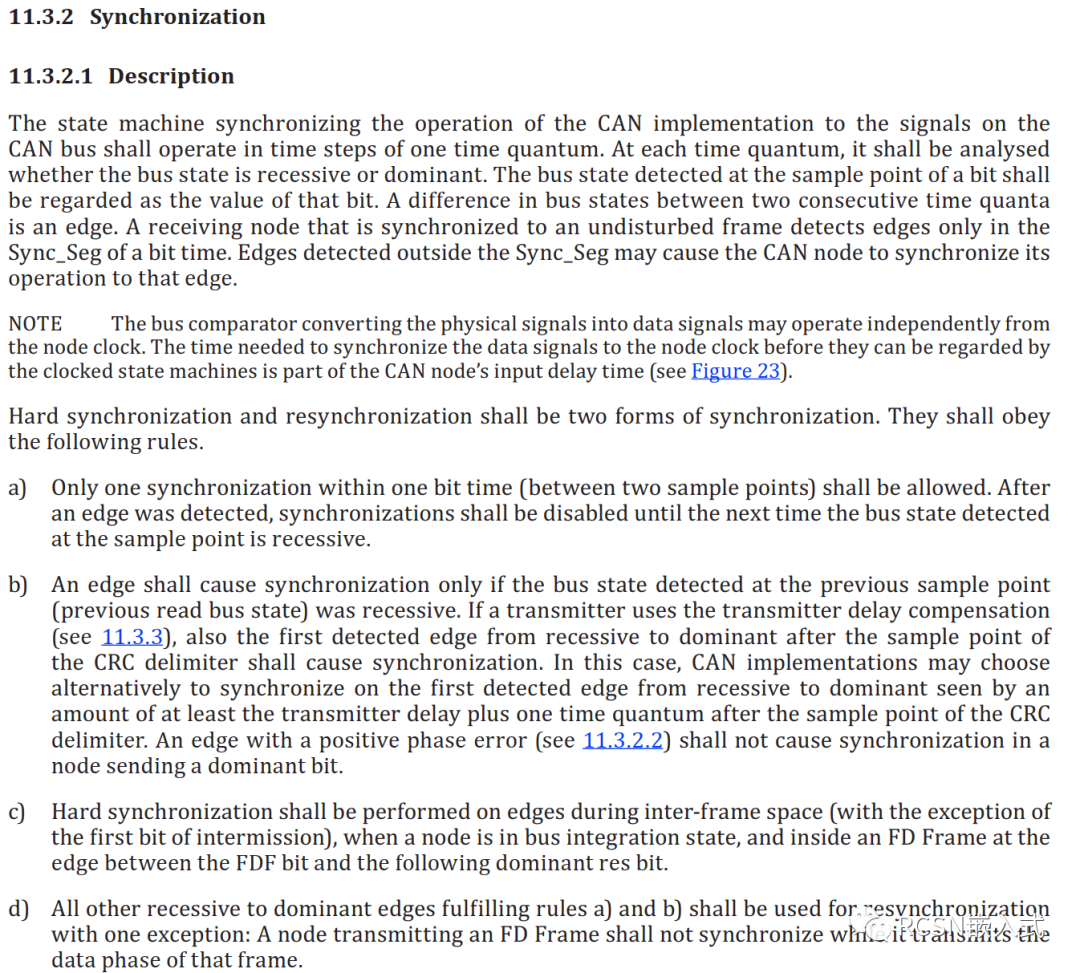
如果两个节点位时间相同,CAN控制器会自身保持同步,同步的方式有两种:硬同步和重新同步。
这两种方式都必须遵守以下规则:
(1)、一位时间内(两个采样点之间)只允许一次同步。检测到边沿后,应禁用同步,直到下一次在采样点检测到的总线状态为隐性。
(2)、仅当在前一个采样点检测到的总线状态(前一个读总线状态)为隐性时,边沿才应引起同步
(3)、当节点处于总线集成状态时,在帧间间隔期间(除了间歇的第一位),以及在 CANFD 帧内,应在边缘上执行硬同步。也就是在SOF上开始硬同步,其他bit都在重新同步。
(4)、满足规则 1 和 2 的所有其他隐性到显性边缘均应用于重新同步,但有一个例外:传输 CANFD 帧的节点在传输该帧的数据阶段时不应同步,而采取重新同步。
这里截取了ISO文档说明:
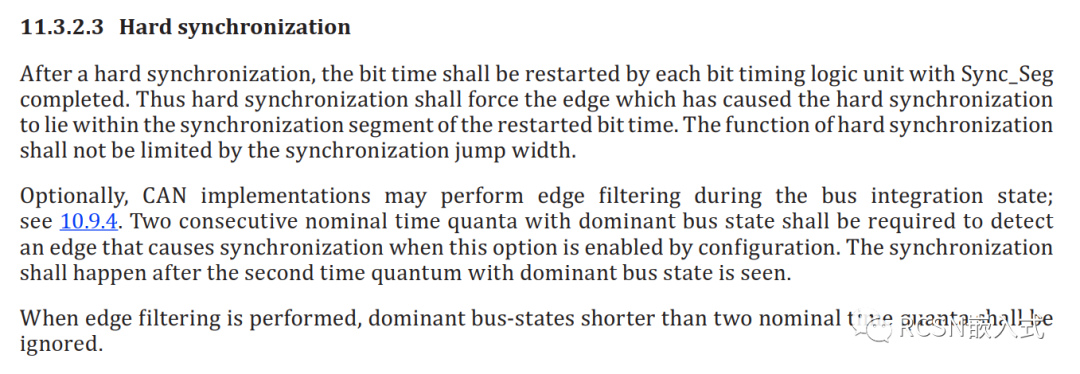
1、硬件同步
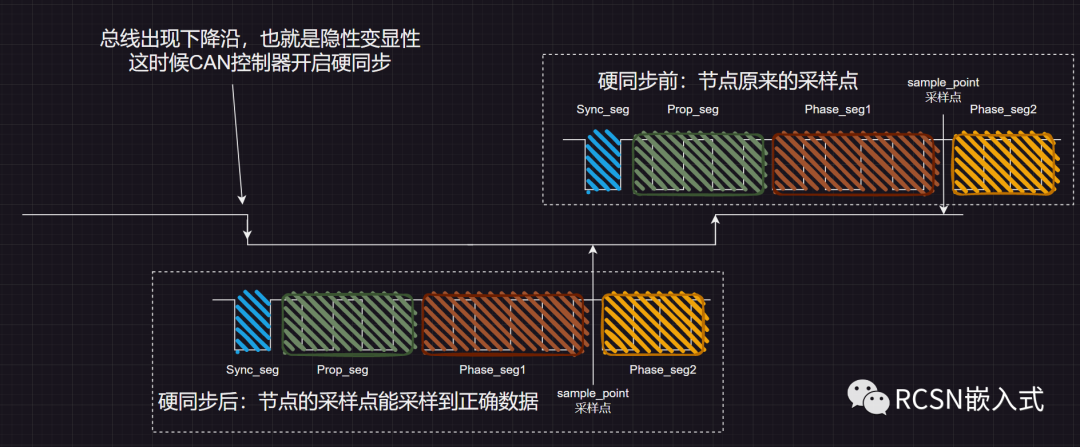
在以上规则中,我们可以通过检测SOF帧起始,SOF帧的开始就是在CAN总线空闲下(连续11个位的隐形电平,也就是逻辑1),一旦有显性电平出现,那就是有SOF帧开始,根据上述规则1和2,可以直接使用的是硬同步。硬同步会强制把位时间拉至边沿,保持同步。这个阶段不受同步跳转宽度SJW限制。
ISO文档同样也有说明:
比如:以下波形,当检测到SOF时候,CAN控制器需要满足ISO标准,执行硬同步。
2、重新同步
如果在仲裁段相当比较长的时间内,比如ID段,连续的传输会带来相位的左右偏移,这时候就需要重新同步了。这时候就需要SJW,对seg1和seg2适当进行延长或缩短一定的TQ。

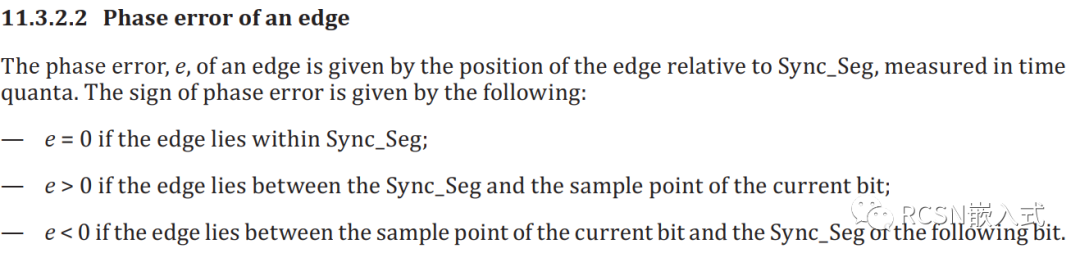
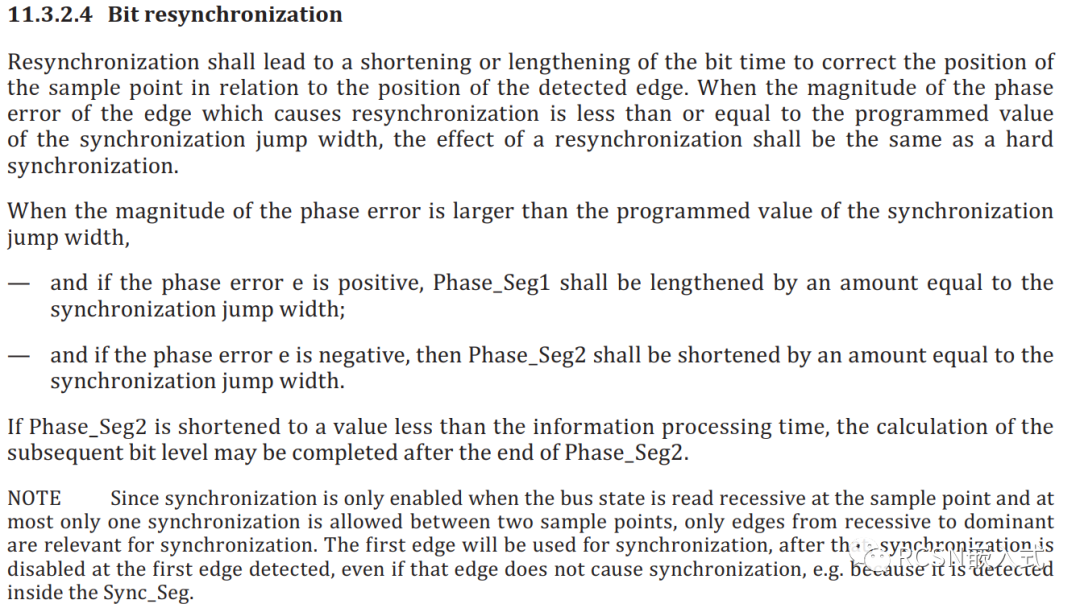
这看起来有点难理解,那么还是以时序图来说明,以相位超前超后例子。
相位超前,CAN控制器会根据sjw同步跳转宽度进行加入对应的TQ,使之sync_seg段能同步到下一个边沿。
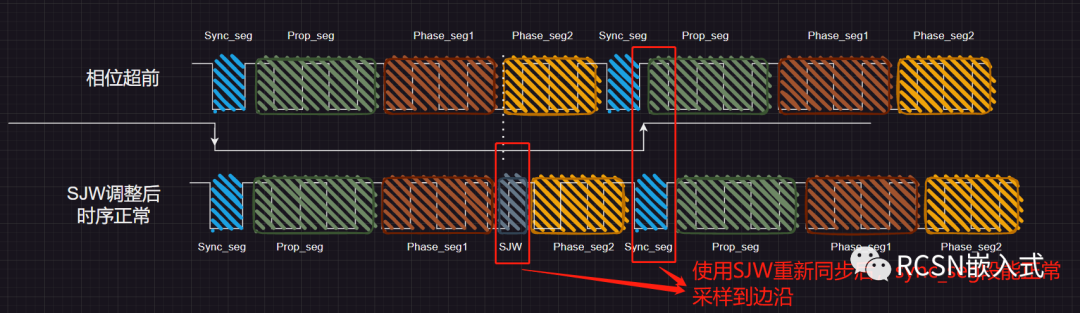
相位超后,CAN控制器会根据sjw同步跳转宽度进行减少对应的TQ,使之sync_seg段能同步到下一个边沿。
在上面的阐述中,采样点的取值范围尤为重要,对于同步上也是比较关键的参数,在ISO中并无此建议值,但是在hpm_sdk中有提及,建议是75%到87.5%。

从上面讲了一大堆,其实上面所阐述的一些同步均由CAN控制器实现,但是为了方便理解软件开发,是有必要了解。
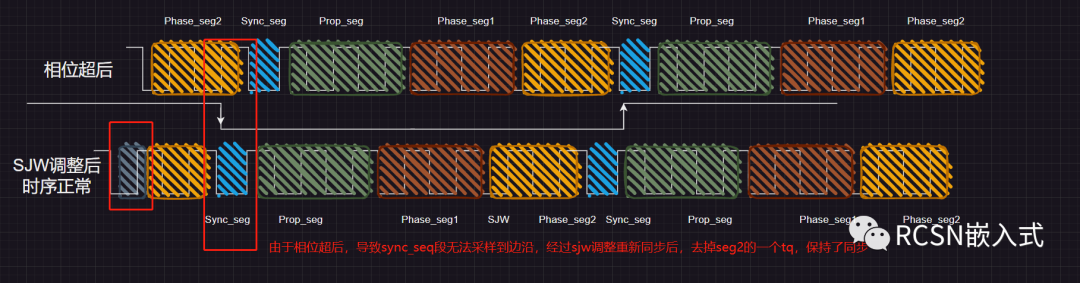
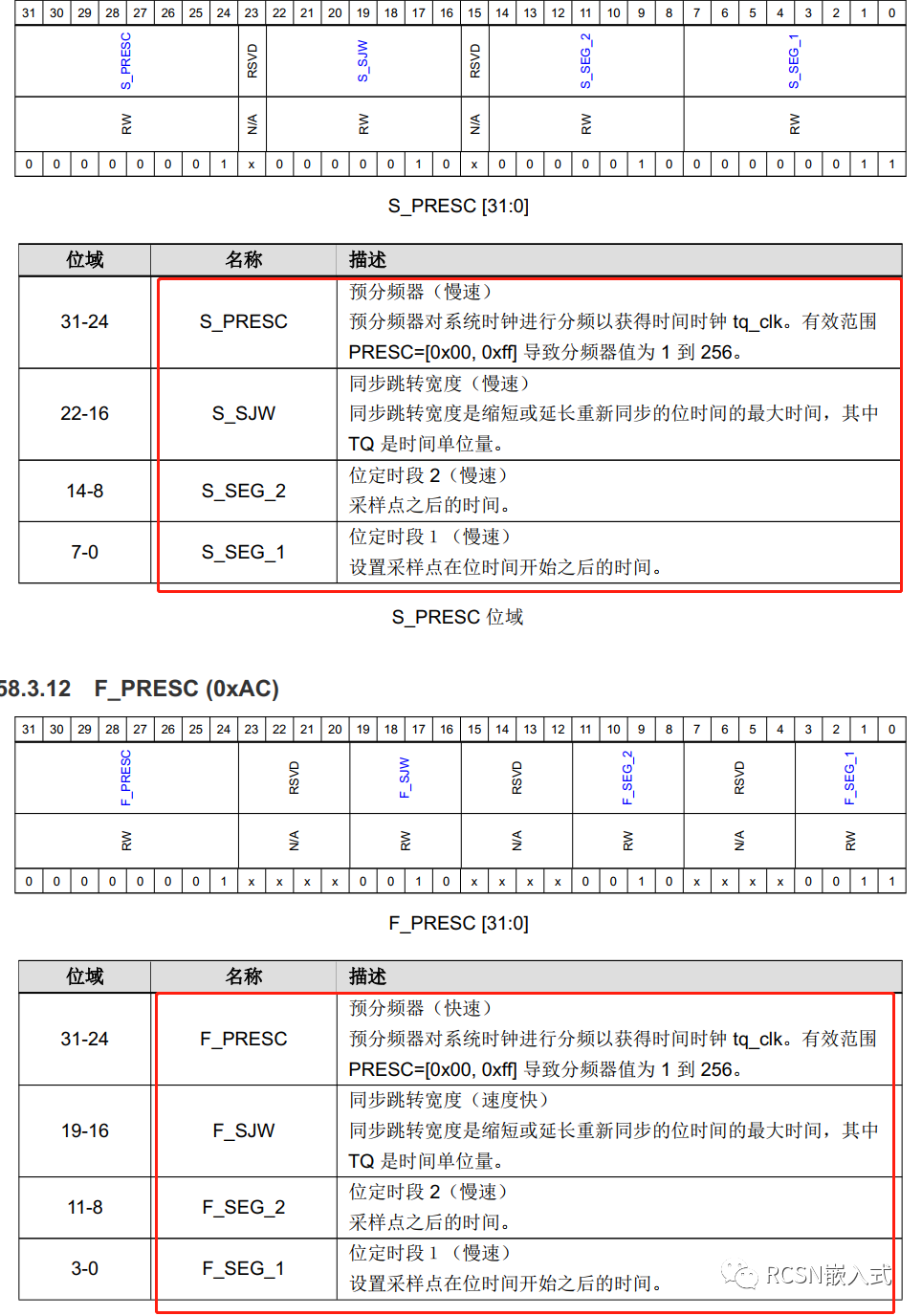
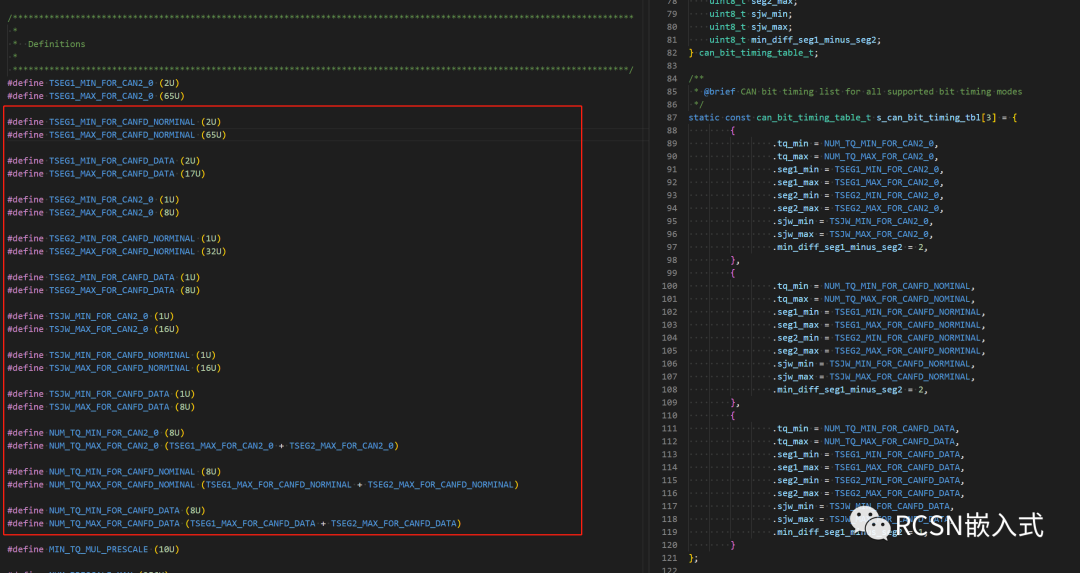
CAN的位时序涉及到CAN时基、sync_seq、sjw、seg1和seg2。在先楫当中也有涉及到这些寄存器,分为仲裁段(标称位)和数据段位。需要注意的是:
先楫的CAN的seq1包括了位时序的sync_seg+prog_seg+phase_seq1。
先楫的CAN的seq2是位时序的phase_seq2。
根据ISO规定,sjw不计入到位时序中。
3、hpm_sdk的波特率设置API
sdk的CAN驱动的波特率设置,写的比较贴心,提供了两种方式来设置。一种是直接代入实际的波特率,第二种是自己写入位时序参数。根据use_lowlevel_timing_setting这个变量来决定哪种方式。
如果需要使能CANFD,则需要开启enable_canfd,超过1M的数据段波特率,建议开启enable_tdc。
这些参数的成员说明可以查看SDK的can_config_t结构体,这里不做阐述。
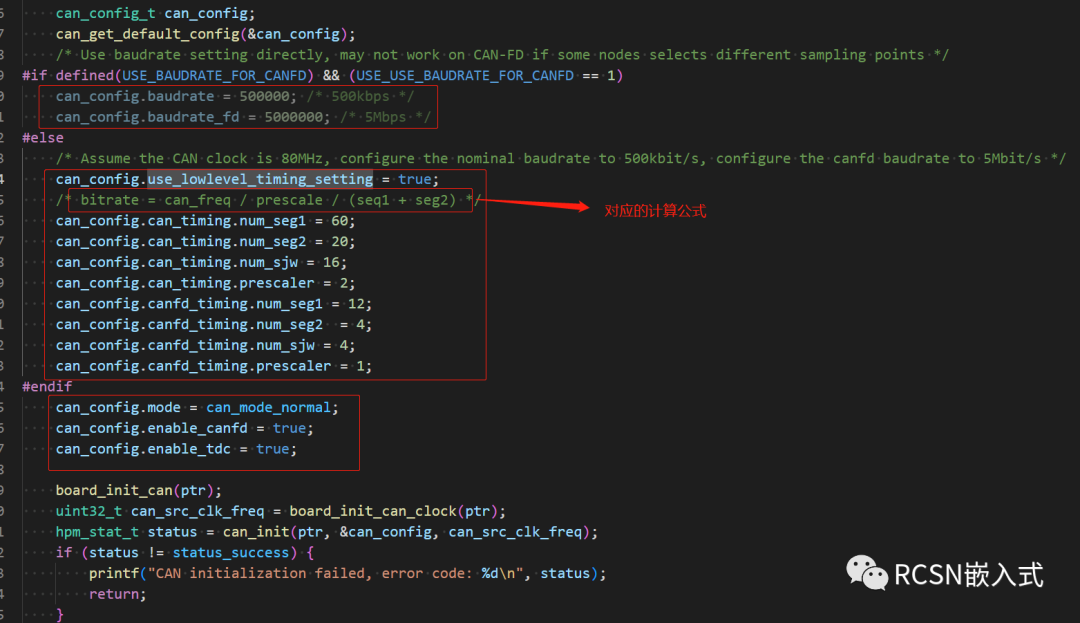
对于直接代入实际的波特率的方式,sdk使用ISO文档建议的位时序参数,适合通用的场合。
SDK中,根据波特率转换成对应的位时序参数。API接口是can_set_bit_timing。里面调用了can_calculate_bit_timing这个API得出位时序参数带入到CAN的对应寄存器中,完成波特率的设置。
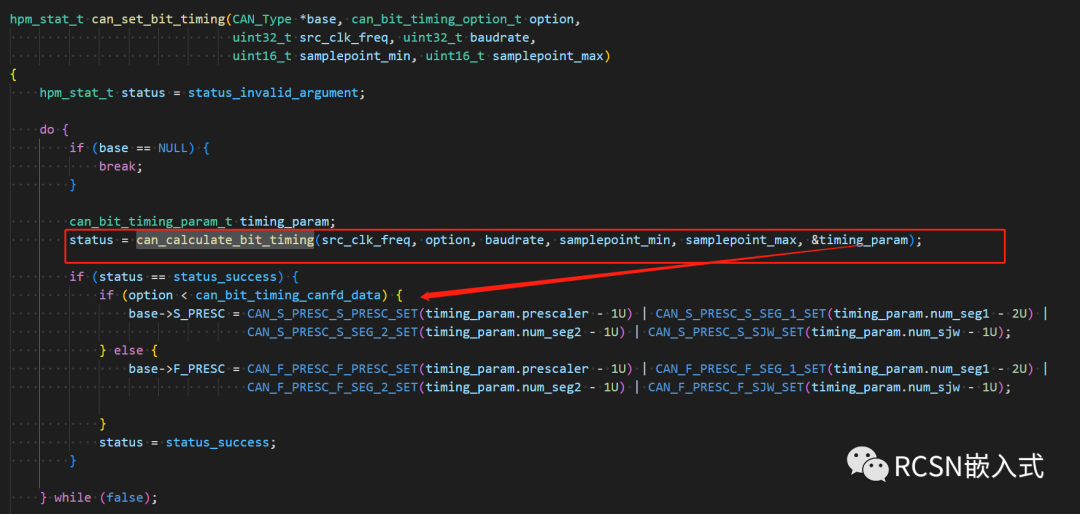
can_calculate_bit_timing根据波特率和CAN时钟先算出TQ和分频系数相乘值num_tq_mul_prescaler,然后依次代入分频系数直到算出tq和分频系数等于num_tq_mul_prescaler,得出一个位时序的TQ数量,再根据采样点范围算出SEQ1和SEQ2,但会再匹配ISO建议的位时序参数的对应最小和最大值,保证在此范围内。否则返回错误。
需要注意的是:
先楫的这个CAN外设的CANFD支持非ISO标准和ISO标准,也就是enable_can_fd_iso_mode,sdk默认是使用ISO标准,需要使用can_get_default_config这个API初始化参数。否则可能就是非ISO标准。
非ISO标准和ISO标准,对于经典CAN不受影响,但是CANFD会报CRC错误。
(三)收发数据流程
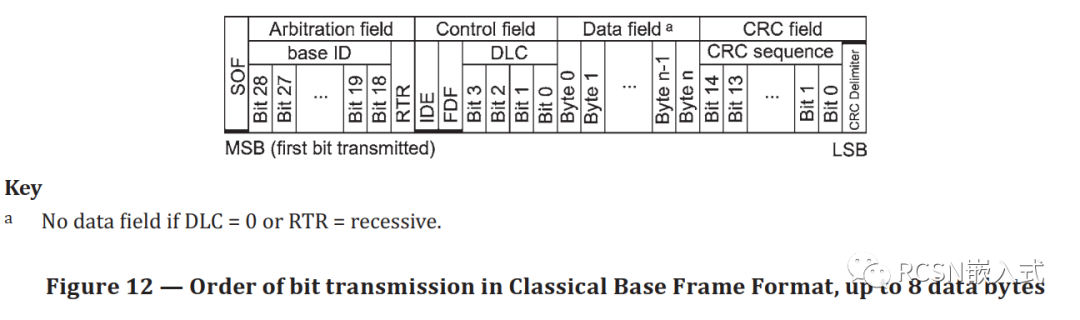
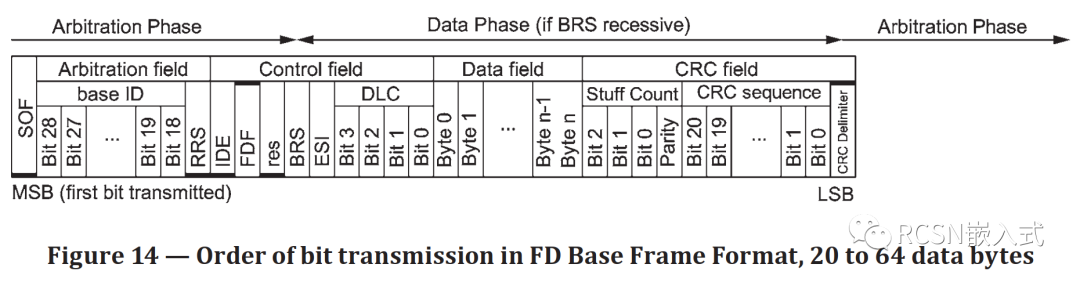
对于CAN帧结构,这里不做阐述。调用ISO文档的截图理解:
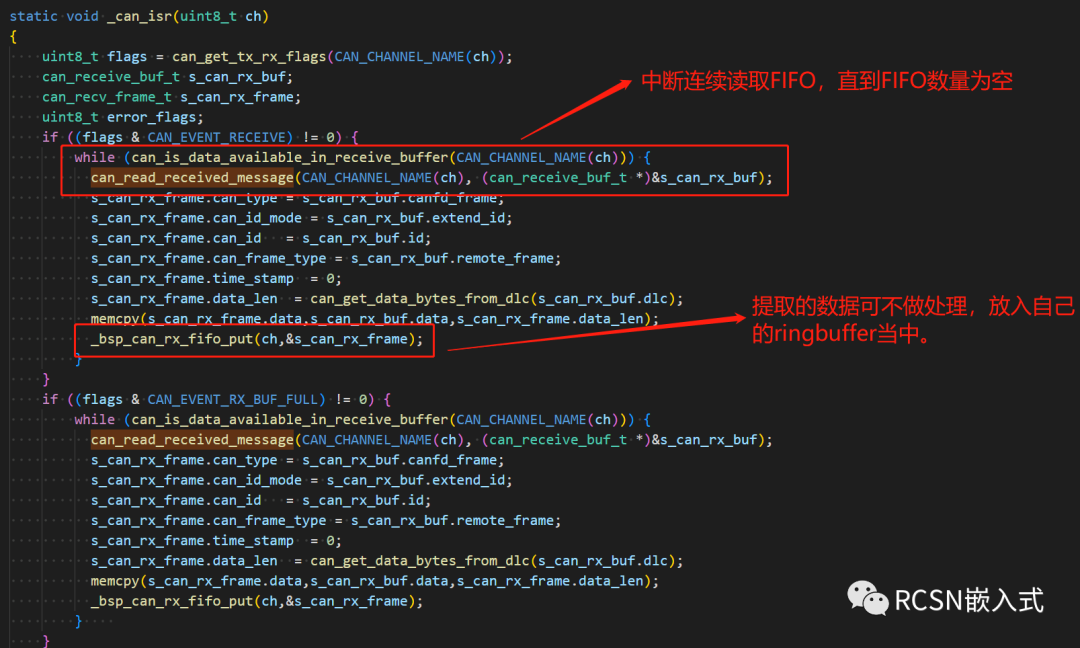
上述提到,对于接收来说,有16个FIFO;对于发送来说,有8个副发送缓冲器。这样对于收发来说是相当足够的。
在sdk当中,收发都提供了非阻塞和阻塞接口,分别对应的后缀是_noblocking或者blocking。
接收阻塞API:can_receive_message_blocking
接收非阻塞API:can_read_received_message
建议使用非阻塞API,开启接收中断以及满FIFO中断。在中断读取FIFO数量,最大性能提取数据,然后依次调用can_read_received_message。比如:
对于发送:
阻塞接口:can_send_message_blocking
非阻塞接口:can_send_message_nonblocking
建议使用非阻塞接口,每次调用前判断发送缓冲器是否满,然后依次调用can_send_message_nonblocking塞入数据。比如:

(四)实现效果
HPM6750的四路CANFD,在500K仲裁段5M数据段的波特率下,可以几乎跑满载。
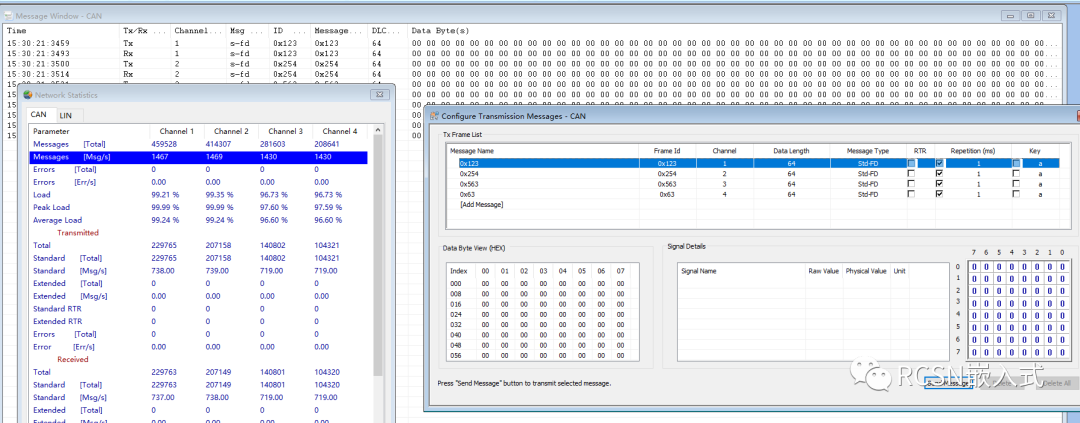
实验平台:hpm6750evkmini+stephen大佬开发的CANFD适配扩展板。
三、总结
对于CAN的,本文主要阐述波特率设置、数据收发流程。其他的比如过滤器组设置、总线错误等后续再阐述。
先楫HPM_SDK对于CAN驱动,相关API接口以及结构体定义比较清晰,容易入手使用。
先楫的CANFD的收发自带FIFO缓存器,开发者可以根据需求使用,可以提高收发性能,达到满载测试性能。
-
将 CANFD 0 通道 2 上收到的所有消息传递到 CANFD 1 通道 0,是否可以使用 DAM 通道?2025-07-14 1188
-
一帧CANFD报文由多少个位组成?2024-04-27 10297
-
TC275D系列的芯片支持标准CANFD能配置成非标准CANFD的吗?2024-02-06 2769
-
求助,关于M467系列CANFD的BSP例程疑问2024-01-16 726
-
CAN与CANFD的区别 CAN与CANFD如何转换2023-11-22 8690
-
hpm5361在rtthread轻松搞起USB转换器2023-11-21 4485
-
玩转先楫CANFD外设系列之二:CAN外设的接收过滤器详解2023-08-24 3872
-
基于先楫半导体RISC-V的四路CANFD转USB接口卡2023-08-07 2005
-
开发者分享:轻松搞起CANFD2023-08-01 5483
-
基于Tricore的CANFD入门工程2023-07-12 2149
-
CANFD的发送模式解析2022-03-21 7983
-
配置CANFD模块的注意事项有哪些2021-11-25 964
-
哪些STM32有CANFD2021-08-12 3392
-
CANFD节点如何与经典CAN总线正常通信呢?2021-06-16 3100
全部0条评论

快来发表一下你的评论吧 !
