

开发一种高集成度、低成本的活鱼可穿戴电子系统
电子说
描述
★ 研究背景
有水运输途中水质的变化以及机械损害可能导致鱼类的长期健康问题。低温无水运输作为一种清洁而新颖的运输策略逐渐受到关注。然而,运输过程不可避免的各类胁迫因素会造成活鱼的生理参数波动以及应激反应。应激水平的合理评估成为了制定动态调控策略以及提高存活率的前提。近年来,可穿戴电子,尤其是可拉伸电子由于在健康监测、电子皮肤、以及可穿戴显示领域的潜在应用而备受关注。软器件可以可靠且无损地共形于各类物体表面,例如皮肤、植物、和食品,用于实时质量检测或监测。同样,可以将其黏附于活体动物体表,以原位获取养殖或运输期间的环境和生理参数。
中国农业大学张小栓教授团队开发并应用了一种高集成度、低成本的活鱼可穿戴电子系统(LFWES)。系统由PDMS基的气动直写可拉伸电路(SC)连接fPCB构成。良好的结构设计保证了小体积、柔软的优势,同时在拉伸循环后仍能实现温湿度、欧拉角的多模无线传输。我们首次提出将SC穿戴于活鱼鳃部用于无损监测呼吸运动状态以及微环境参数。在10 h的模拟运输过程中鲟鱼应激状态可以划分为急性应激、应激适应、和应激累积阶段,结果与标准血糖数据相匹配。同时,模糊神经网络(FNN)被用于针对环境和生理数据融合建模,应激等级评估精度达到了88.1%。此研究对于将可穿戴电子技术与活体动物的运输过程相结合,提升运输效益与管理水平具有指导意义。
★ 文章解析
在活鱼的低温无水运输过程中,鱼鳃的呼吸运动欧拉角是应激参数的关键表征指标。鱼鳃的张闭运动对应角度的周期性波动,进而对个体应激强弱进行特征提取,如图1a所示。同时,活鱼充氧运输袋中的微环境参数变化对于个体累积应激的影响不容忽视。据此,我们设计并开发了LFWES,由 PDMS基SC经软排线连接fPCB组成。SC和fPCB分别具有33 × 26 mm2 和42 × 38 mm2的较小尺寸,而软排线可根据鱼体长度进行灵活调整。系统示意图以及概念框架如图1b,c所示。SC搭载了高精度数字式温湿度传感器SHT30以及六轴姿态传感器MPU6050。后者自带的数字运动处理器(DMP)能够实现欧拉角的解算,进而对活鱼的呼吸深度(RD)和呼吸强度(RI)进行特征提取。元器件之间通过可拉伸导电银浆进行电气连接。两传感元件均作为I2C从机设备进行实时数据传输。微控制单元(MCU)进一步连接外部蓝牙模块将数据无线透传至终端,全系统由可充电5V,900 mAh的锂离子聚合物电池供电。如图1d所示为组装完成的柔性感知系统实物图,在保证稳定工作的前提下具有紧凑的布局,能够满足活体动物可穿戴的应用场景需求。
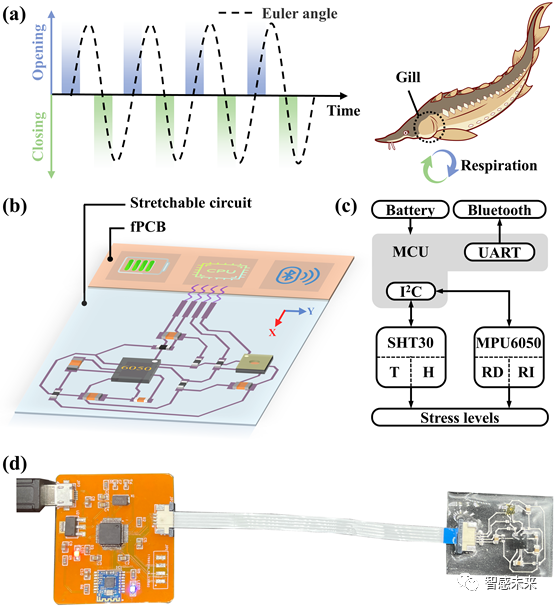
图1: LFWES的主要设计思想
旋涂制备300μm厚的PDMS膜并进行氧等离子处理作为可拉伸基底。使用多功能打印机(Prtronic,DB100)的气动直写模式在薄膜表面打印预先设计的电路。工作参数如下:气压80 kPa,速度 5 mm/s,Z轴间距0.2mm。上述参数可微调以灵活控制线宽。接着,将电阻器、电容器以及传感芯片植入电路相应位置,利用银浆的较强黏附力使其与引脚良好接触。电路被置于100 ℃环境退火1 h实现银浆的固化,确保元器件不损坏的条件下加固焊接。最后,使用Kapton胶带进行温湿度感知芯片的表面封装以提高其工作可靠性,并浇注PDMS前体并在80摄氏度下退火3 h完成整体电路封装。得益于可拉伸导电银浆的优良基底附着力与断裂伸长率,SC展现出了良好的拉伸、弯曲、和扭转特性(图2b–d)。同时,所设计的SC厚度小于2mm,质量约1.5 g,在最小化活鱼穿戴过程外部刺激的引入方面具备优势。
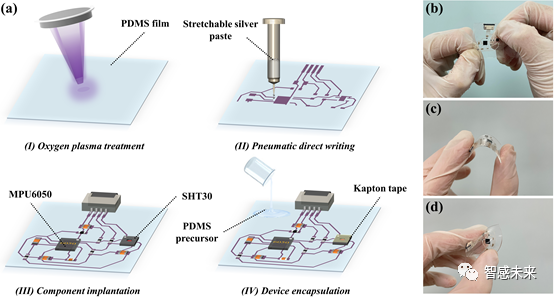
图 2:SC的制备
无水活体运输前需要对鱼进行禁食暂养和梯度降温休眠处理。小心地擦拭鲟鱼鳃盖表面的积水与黏液后使用医用等级快干胶水(PR100, 3M)将SC共形于鳃盖表面,随后立即放入自制缓冲板并充氧包装(图3)。充氧运输袋被置于4℃低温培养箱10 h以模拟无水活体运输过程。
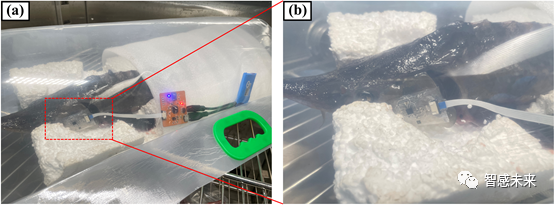
图 3:低温无水活鱼运输多参数监测
为了清晰地描述鲟鱼无水运输过程应激等级评估模型,搭建了图4a所示的评估框架,主要包含目标层、规则层、和等级层。其中RD和RI分别提取自角度波形的幅值和频率。每个因子下鲟鱼的应激等级被划分为了5个等级。考虑到环境和生理因子与应激等级之间存在模糊而复杂的非线性关系,选择模糊神经网络(FNN)进行多因子的数据处理与建模。如图4b所示,FNN包括输入层,模糊化层,模糊规则层,和输出层。模型训练过程训练集与验证集的比例设为7:1。按照时间轴等距抽样的方式选取了来自十条鱼的151组数据代入模型进行测试。为保证模型的泛化能力和预测精度,通过多次训练和验证确定了以下关键的模型参数:迭代次数=100,隶属度函数个数=10,神经网络系数=0.3,误差容限=0.01。
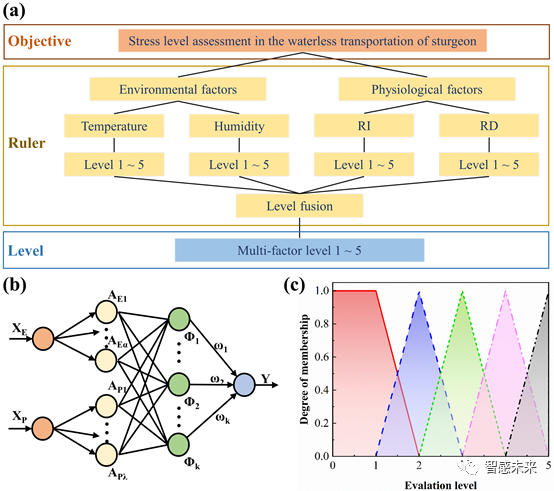
图 4:鲟鱼无水运输过程应激水平评估模型构建
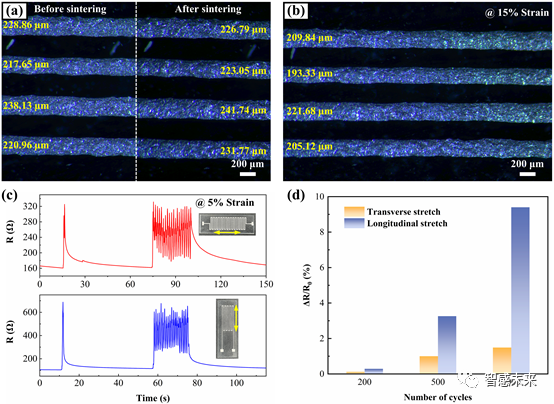
图 5:SC的机械性能探究
在PDMS基底上气动直写可拉伸导电银浆制备了两种蛇形导电图案以分别测试横向和纵向拉伸性能。通过协调直写参数,可以实现线宽和线间距小于250 μm的导电银线的制备,验证了精密电路制造的可行性。图5探究了银浆在基底上的流动性、黏附性、以及拉伸过程的机电性能。对SC施加10%的拉伸应变1000个循环后探究其电气性能,如图6所示。
使用制备的LFWES对充氧运输袋中的微环境以及鲟鱼生理参数进行长达10 h的贴附式无损监测。可以得到如下的鲟鱼无水运输过程应激状态变化规律:
Stage Ⅰ: (~ 0–1 h) Acute stress.个体进入无水低温运输新环境而产生较为剧烈的应激反应。鳃盖张闭角度以及频率快速上升,RD和RI均处于较高水平。
Stage Ⅱ: (~ 1–8 h) Stress adaptation.随着时间推移,运输袋微环境参数趋于稳定,个体逐渐开始适应运输新环境,呼吸角度及频率停止升高,RD和RI降低至中等水平后开始出现较大幅度的波动。
Stage Ⅲ: (~ 8–10 h) Stress accumulation.在外部应激源的持续影响下,个体应激已达到较高水平,RD和RI逐渐在较低的水平趋向稳定,伴随着明显下降的波动幅度。
如图7d所示,血糖浓度在前7h内逐渐下降,而后回升。鲟鱼在Stage Ⅰ–Ⅱ 面对新环境的胁迫不断调节生理代谢活动,此过程血糖作为直接能量来源。随着适应期的结束,体内血糖调节导致浓度出现相反的变化趋势。该结果有效佐证了上述规律,表明角度测量间接反应应激状态的可行性。
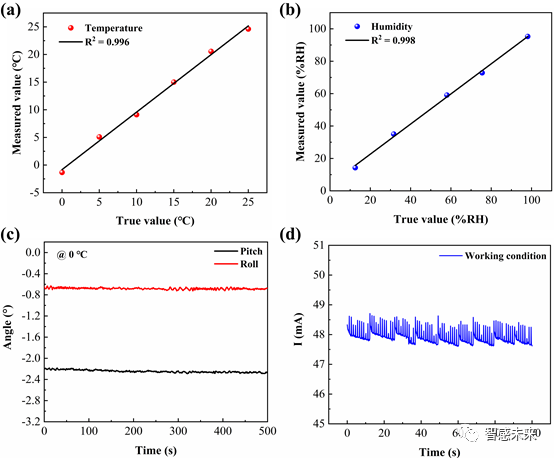
图 6:SC的电气性能
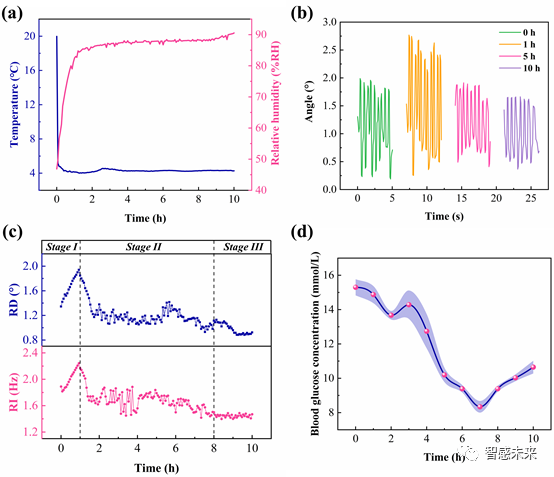
图 7:无水活体运输环境生理参数评估
如图7所示,在使用SVM模型预测牡蛎的应力水平之前,对模型因子进行交叉验证优化。交叉验证结果表明,gamma值为6的多项式核函数(poly)最适合SVM模型。在右-右-壳、左-右-壳和左-左-壳测量位置的准确度分别为93.94%、93.94%和90.91%。与更厚、更不均匀的左壳相比,电极与右壳表面的粘附更紧密,电流路径更稳定。在右-右壳和左-右壳测量位置预测精度较高。
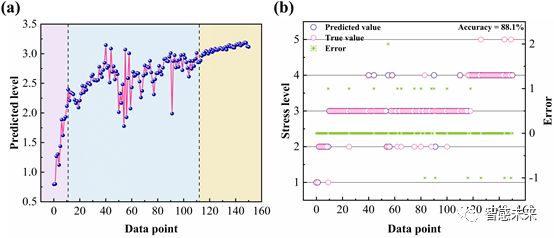
图 8:无水活体运输过程鲟鱼的应激水平评估
基于LFWES所收集的10 h内的真实数据,我们对鲟鱼的应激水平进行了合理的评估。如图8a所示,很显然测试集预测结果呈现出了快速上升,大幅度波动上升,和缓慢稳定上升三个阶段。阶段之间的分界时间节点分别为0.73 h和7.47 h,这较好地匹配了图7c所描述的三个应激阶段。将预测值映射至定义的应激等级1–5,并与真实值对比,结果如图8b所示。很显然预测值与真实值大部分相同,误差多分布于0值以上,表明该模型对应激等级的评价较为严格。模型预测精度达到88.1%,为无水活体运输过程的应激评估提供了参考。
审核编辑:刘清
-
一种电子系统测试性模型的研究2010-04-22 1825
-
高集成度蓝牙4.0模块2016-06-06 2983
-
MCU在可穿戴电子产品中的作用2016-06-29 4806
-
可穿戴电子产品该如何选择MCU?2017-01-17 3436
-
电子系统过热保护新型温度传感器2018-11-19 2723
-
详解数字集成电路分类是怎么分的?2019-02-26 4980
-
宇宙射线对汽车电子系统有什么影响2019-06-21 3439
-
FPGA在车载电子系统的应用2019-07-25 3394
-
友恩半导体持续开发高功率、低功耗、高集成度等产品2020-10-30 2578
-
分享一款不错的基于FPGA实现的短波发射机自动调谐系统设计2021-04-08 1386
-
电子系统设计开发的一般过程是什么2021-04-26 1163
-
分享一种高集成度的车载AM/FM接收器方案2021-05-17 2360
-
TI 推出高集成度、低成本射频增距器2010-03-06 779
-
一种单电源高集成度蔡氏振荡器_高同强2017-01-08 1237
-
低成本高集成度PWM功率开关LN2449简介2022-06-16 2492
全部0条评论

快来发表一下你的评论吧 !
