

开发一种用于无创和无线监测系统的自感知AI微型机器人
机器人
描述
微型机器人由于其体积小巧、运动灵活以及各种原位治疗的潜力而受到了极大的关注。然而,除了精确的运动控制之外,微型机器人的功能改善对于其与环境的交互变得至关重要。
据麦姆斯咨询报道,近日,北京理工大学、香港城市大学的研究人员组成的团队在Microsystems & Nanoengineering期刊上发表了题为“Self-sensing intelligent microrobots for noninvasive and wireless monitoring systems”的论文,提出了一种基于电磁成像中局部磁场增强的无线自感知人工智能(AI)微型机器人,用于体内无创监测。提出的AI微型机器人由一个配备有可调谐射频(RF)线圈的传感器的头部和一个可由外部磁场驱动的磁性尾部组成,它可以与外部电磁成像设备配合,增强局部射频磁场,实现大穿透传感深度和高空间分辨率。其工作范围由传感器电路的结构决定,相应的增强效果可以通过周围环境的电导率和介电常数来调制,最高可达~560倍。在外部磁场的控制下,磁性尾部可以驱动微型机器人进行精确运动,有望实现对人体不同部位近乎无创的原位监测,尤其是潜在疾病周围,对疾病的早期发现和准确诊断具有重要意义。此外,兼容的制造工艺易于量产功能性微型机器人。这些研究结果凸显了自感知AI微型机器人根据传感信号进行原位诊断甚至治疗的可行性。
图1a展示了AI微型机器人在外界控制下在人体内部“巡查”的场景示意图。在现有的电磁成像方法中,磁共振成像(MRI)因其高穿透深度和空间分辨率而得到广泛应用。微型机器人头部的传感部分从成像设备的射频线圈产生的电磁场中获取能量,并调制局部射频磁场,从而改变图像中相应位置的信号。周围环境的介电特性,包括介电常数和电导率,决定了传感电路的电特性,进而影响对局部射频磁场的增强效果。疾病会改变微环境的介电特性,因此,当微型机器人到达病变附近时,增强信号会发生变化,从而提示可能发生疾病。图1b显示了衬底上的图案化的微型机器人和制造完成的微型机器人。所设计的器件是按照图1c所示的工艺一步一步地被制造的。
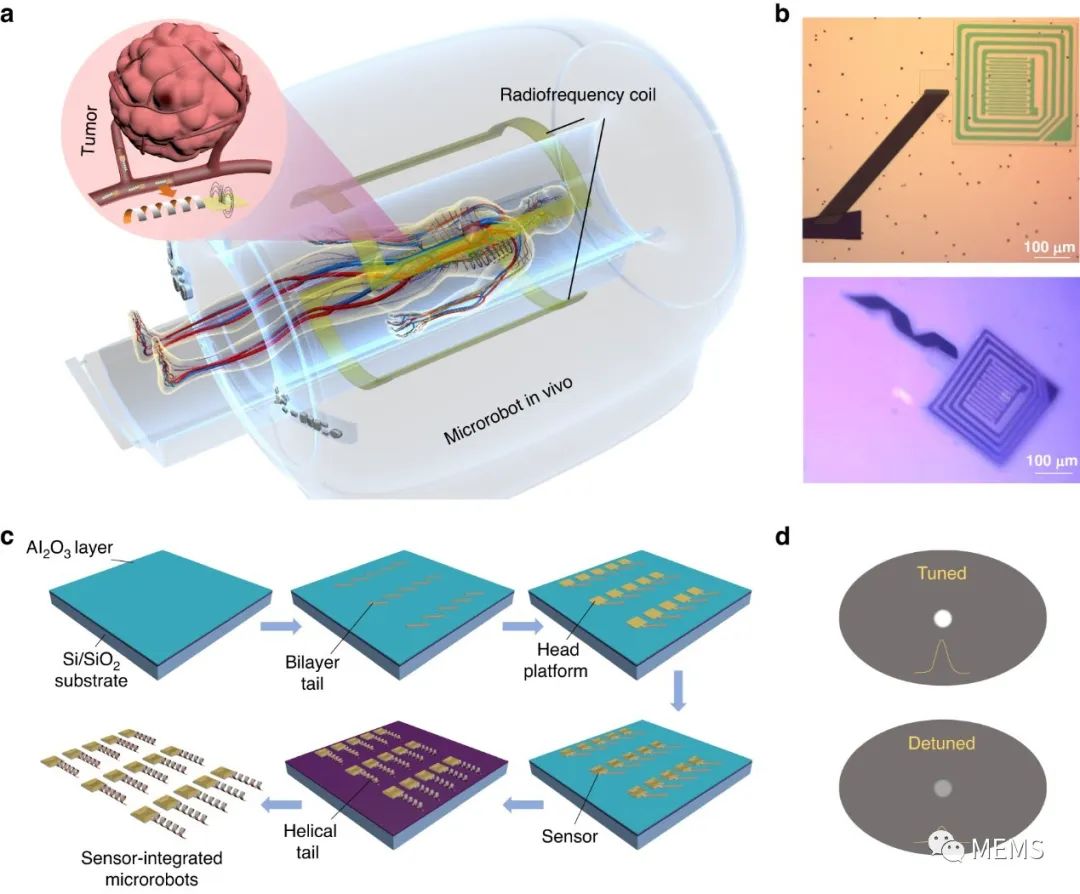
图1 AI微型机器人配合电磁成像设备进行疾病诊断
微型机器人的头部平台由100 nm SiO2制成,作为支撑传感器的衬底。传感器的三层结构依次被制备在微型机器人的头部之上。中间叉指电极(厚度<10 μm)约占头部面积的25%,并被环形电极包围,环形电极通过两个通孔与底部电极连接,形成闭合的电阻-电感-电容(RLC)回路,如图2a所示。射频线圈的尺寸范围为~500至~50 μm,叉指电极对的数量可以根据实际要求进行调整。最后,将芯片浸泡在NaOH溶液中蚀刻牺牲Al2O3层,释放SixNy层中的应力,使其卷成螺旋尾部。图2b展示了RLC无源传感器的原理图。
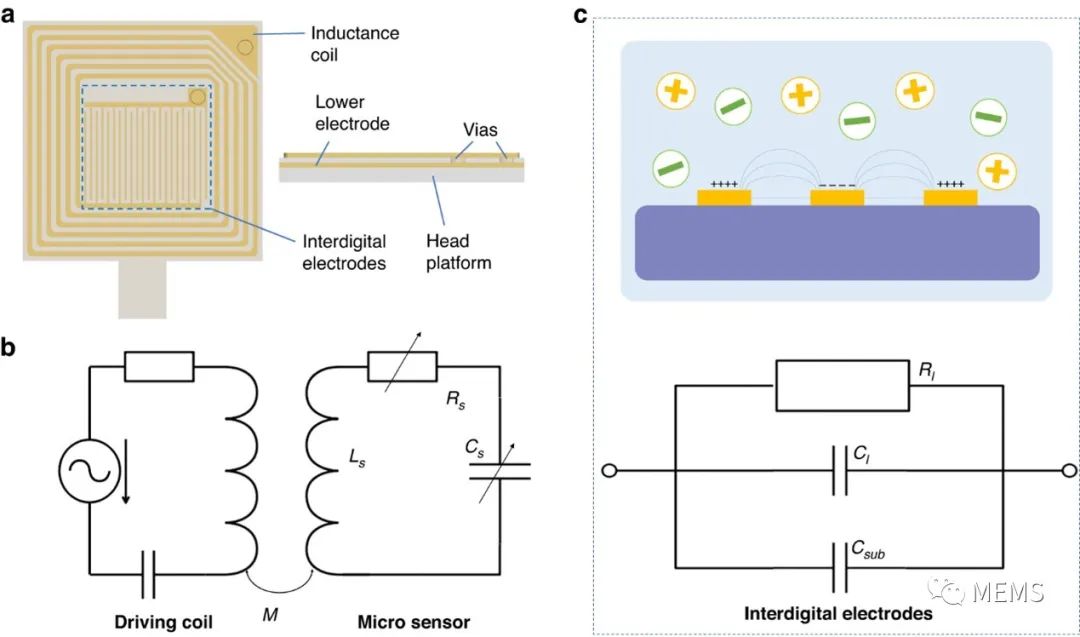
图2 无线传感器工作原理
周围环境可以通过改变介电常数或电导率来影响传感器的局部磁场增强性能。研究人员通过模拟研究了介电常数和电导率对器件性能的影响,如图3所示。
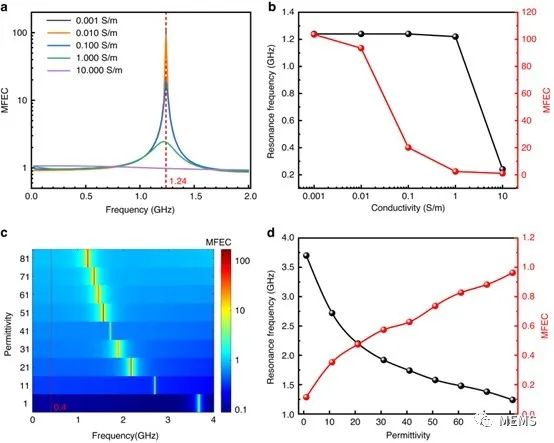
图3 器件性能模拟结果
根据理论结果,研究人员在微型机器人上制备了一个合适的结构传感器,并将其连接到准备好的外部测量设备上,如图4a所示。一个边长为1 mm的正方形线圈被用作外部读出线圈,其与环绕着感知叉指电极的线圈耦合。外接线圈通过一个SMA连接器连接到网络分析仪上进行扫频测试,测量电路被制备在印刷电路板(PCB)上。传感器的电磁特性的测量结果如图4c-4h所示。
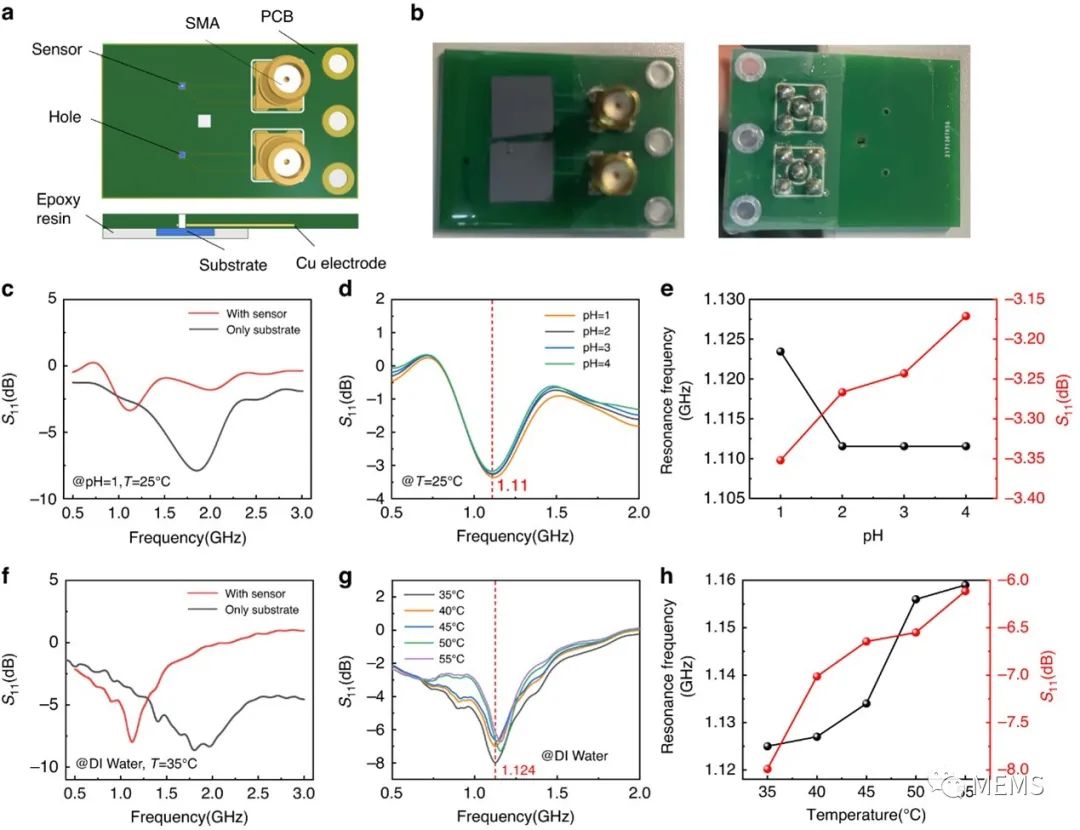
图4 使用网络分析仪测量传感器的电磁特性
研究人员对集成AI微型机器人进行运动控制和姿态调整,以获得其运动特性,如图5所示。驱动磁场由三对相互垂直的亥姆霍兹线圈产生,所产生的旋转磁场的强度和方向可以根据运动要求进行调整。尾部在外部旋转磁场的作用下旋转,通过螺旋结构将旋转转化为平移,从而使微型机器人能够根据磁场旋转方向前后移动。工作环境为去离子水。在整个驱动实验中,AI微型机器人分别实现了从0秒至7秒和从7秒至23秒的直线和圆周运动。
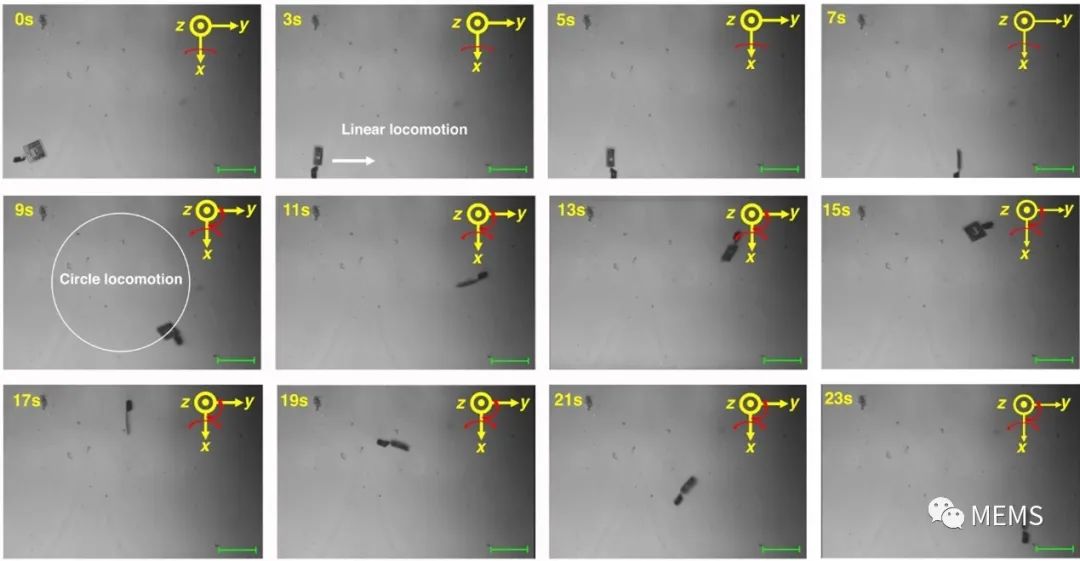
图5 集成AI微型机器人运动控制与姿态调整的时间分辨光学图像
综上所述,本研究提出了一种用于无创体内监测的无线AI微型机器人,以实现自感知功能。这种新型AI微型机器人由头部传感器和磁性螺旋尾部组成,能够根据电磁成像中的增强信号灵敏地感知环境变化,并能在外部驱动场的作用下实现精确驱动。传感器电路无需板载电源即可从射频磁场中收集能量,并根据周围环境的电导率和介电常数进行调谐或失谐。这决定了对局部射频磁场的增强效果,可将其增强至~560倍。介电常数的增加导致谐振频率相应降低,而电导率的增加减弱了增强效果。因此,受周围环境影响的阻抗信号可以实时反映微型机器人的工作状态。此外,磁性螺旋尾部在外部磁场的控制下可将微型机器人驱动至目标位置。AI微型机器人具有体积小、运动可控、自感知等特性,结合现有的电磁成像设备,在人体无创监测方面具有巨大潜力,尤其是那些传统设备难以到达的地方。无源传感器与微型机器人的集成凸显了无创无线原位传感的可行性,这对于多种治疗手段的开发具有重要意义。由于采用了兼容的制造工艺,批量生产和集群控制的微型机器人是可以预见的。此外,在AI微型机器人上集成各种功能涂层,可实现对各种生化成分和生物标志物的检测,有望在未来用于特定疾病的诊断。
审核编辑:刘清
-
穿肠过肚微型机器人:未来医疗的神奇法宝2015-06-03 4365
-
血管微型机器人无损伤体内驱动方法2009-06-28 2336
-
微型机器人关节使用超声波电机的优势2020-11-02 2824
-
选择微型机器人电机需要考虑什么?2021-01-22 2301
-
微型机器人由哪些部分组成2021-09-10 1754
-
血管微型机器人无损伤内驱动方法2009-09-08 730
-
一种微型机器人局域网的设计2011-09-08 1013
-
基于MSP430F2234微型机器人无线控制系统2016-02-17 848
-
我国设计出一种微型机器人,将有望在人体内运输细胞2018-07-02 2209
-
预测2026年微型机器人市场将达20亿美元2019-07-29 1516
-
微型机器人会给我们的生活带来什么影响2019-10-29 4055
-
详谈仿白细胞微型机器人的应用2020-08-06 1285
-
爬壁微型机器人的新型建造方法2021-03-29 2494
-
一种基于磁场驱动的软体微型机器人2022-06-09 3479
-
基于微流控和浸渍密封技术的微型机器人2023-01-03 1943
全部0条评论

快来发表一下你的评论吧 !
