

雷达测速的基础知识
描述
雷达能测量目标相对于雷达的速度,它是距离的时间变化率。有时也可以用相对速度来代替距离变化率,这种情况下,速度是速度矢量的大小,通常称为径向速度。
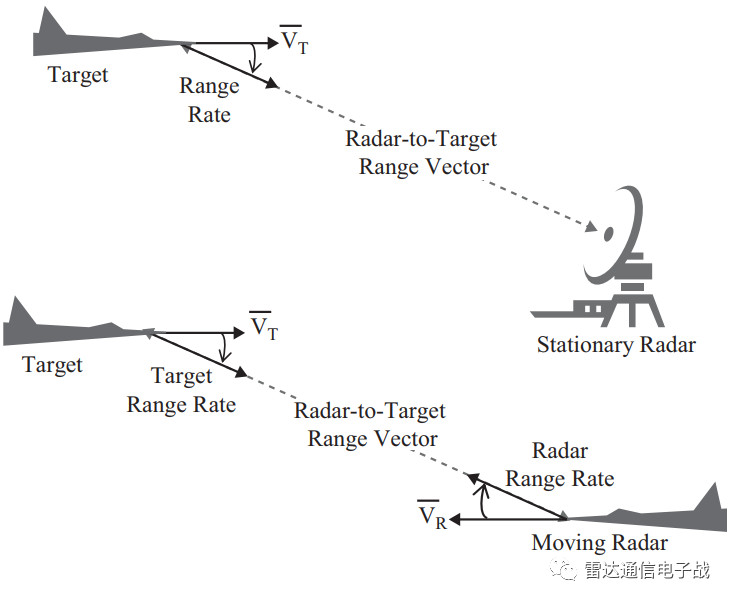
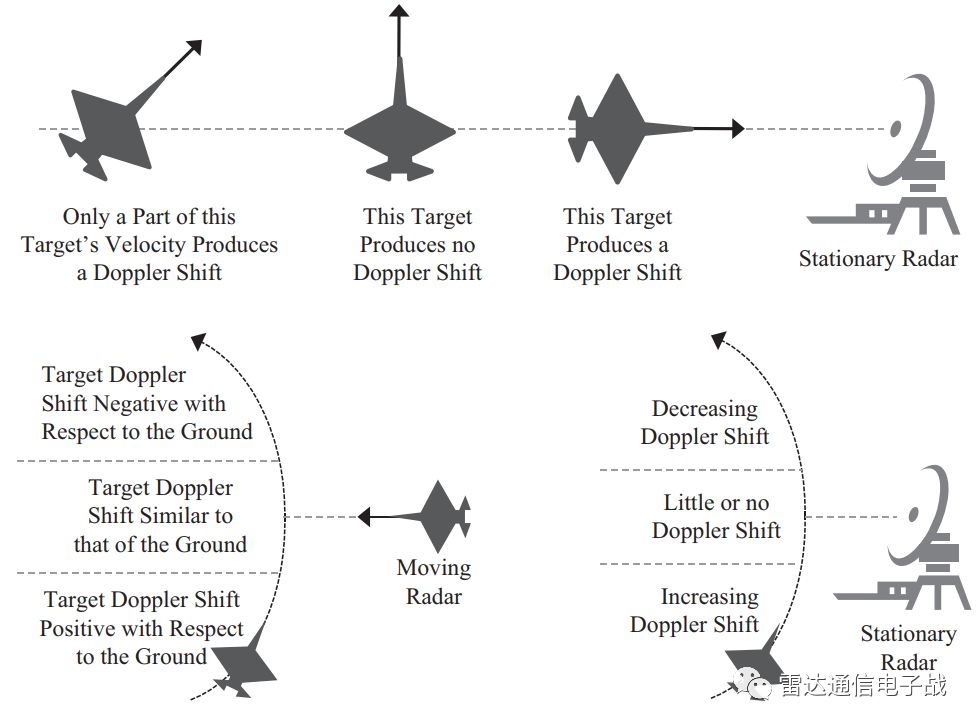
如上图所示,若雷达系统也是移动的,则在目标与雷达的距离矢量上,速度是目标速度矢量和雷达速度矢量的投影大小。
01脉冲多普勒频移测速法
雷达系统有多种测速方法,下面简单介绍脉冲多普勒频移测速法。通过测量接收目标信号的脉冲多普勒频移,雷达系统能计算目标的速度与雷达发射电磁波的相关性。
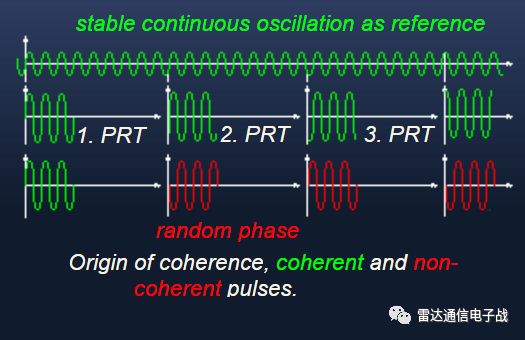
为了测量多普勒频移,雷达系统利用相干的脉冲串信号,通过对产生、发射和接收波形加入准确的载波和调制处理来保证相位。
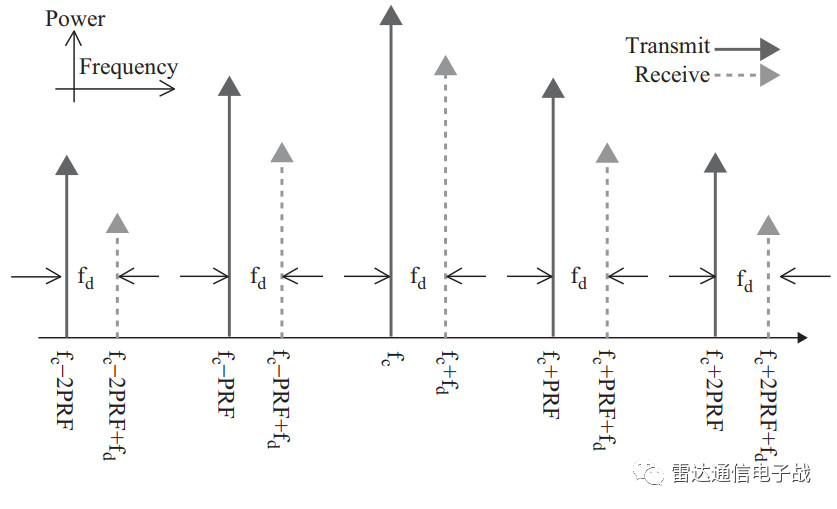
如上图所示,运动目标的回波信号的频谱发生了多普勒移动,测量出该频移量即可计算出目标相对于雷达的速度。从公式中我们可以看出,接近的目标压缩了雷达波,从而使回波频率变高;而远离的目标延伸了雷达波,从而使回波频率变低。负速度(靠近雷达)造成正的多普勒频移,而正速度(远离雷达)的多普勒频移是负数。
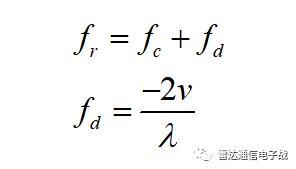
例如,目标的速度是150m/s,雷达波长为0.03m,多普勒频移为10kHz。速度在计算过程中取负值是因为目标在朝向雷达运动,它们之间的距离在缩短。下图所示为雷达载波频率函数在单位速度上的多普勒频移。
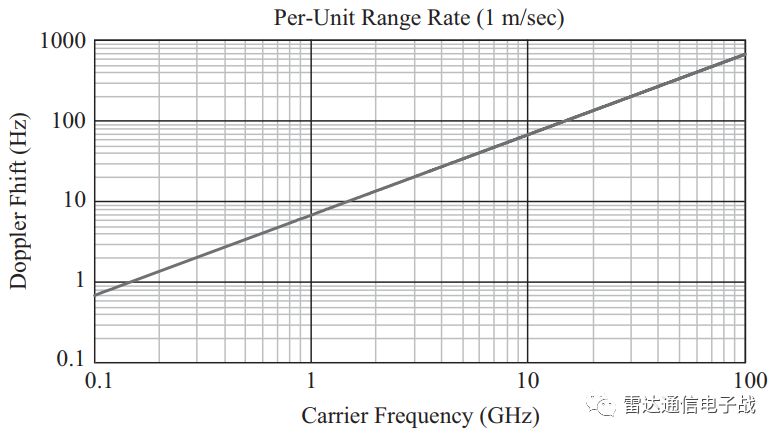
从图中我们可以看出,雷达波频率越高,多普勒频移的值越大。雷达设计者不能控制目标的速度,但可以控制雷达的频率,这就是为什么大部分多普勒雷达都有很高的频率,制造较大的频移以便测量。目标与雷达的相对几何位置以及运动方向对多普勒频移也有较大影响,如下图所示。
02多普勒滤波器组
多普勒频移可以利用连接的窄带匹配滤波器进行计算,包含目标多普勒频移的多普勒滤波器得到的信号具有有很高的信噪比,其他的多普勒滤波器包含的只有接收机噪声。在阈值检测阶段,会遍历每一个多普勒滤波器,从而得到速度的测量。
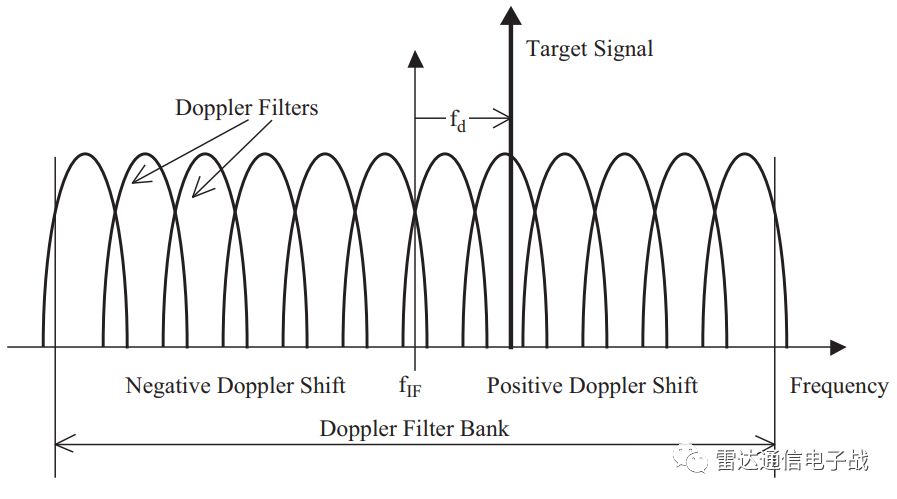
通常情况下,多普勒滤波器会重叠相邻滤波器大约半功率的带宽,连续相邻的多个多普勒滤波器称为多普勒滤波器组,它可以覆盖目标的整个多普勒频移带。对于目标监视雷达而言,所需要的多普勒滤波器数量会很多。
03速度分辨率
窄带滤波器是通过对某段时间输出信号的积分来实现选择,积分时间越长,多普勒滤波器带宽越小。这个积分时间称为脉冲串周期或者相干处理间隔(CPI)。速度分辨率是一个关于多普勒滤波器带宽的函数。
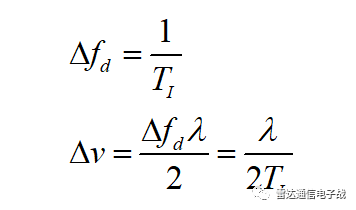
多普勒滤波器带宽与雷达积分时间的关系。速度分辨率本质上是基于最好的多普勒频移,这个频移等于多普勒滤波器带宽。例如,多普勒滤波器的带宽为200Hz,雷达发射信号波长为0.03m,那么,雷达的速度分辨率是3m/s。
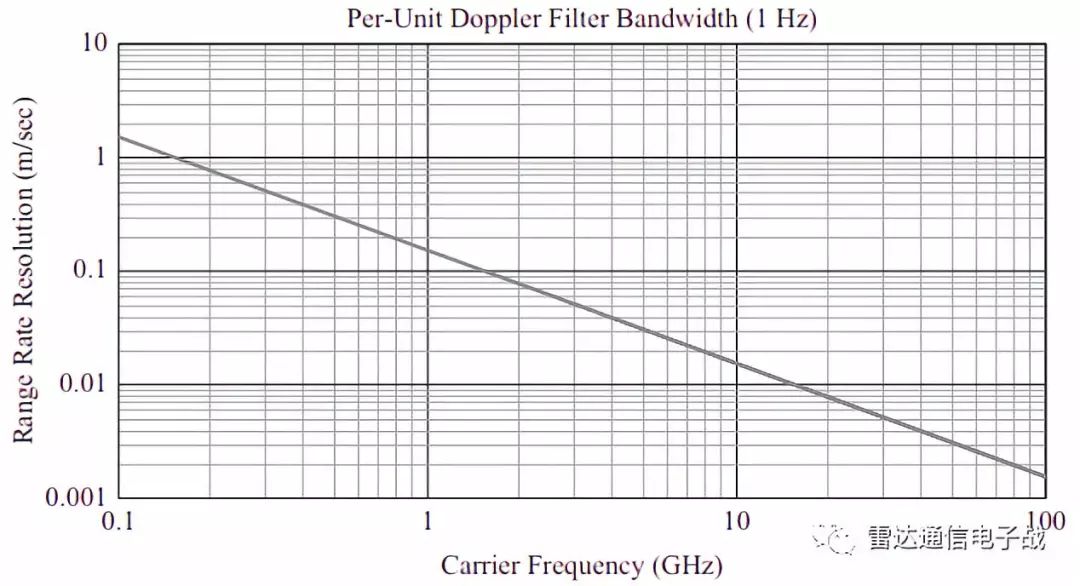
如图所示,每单位多普勒滤波器带宽的速度分辨率是关于雷达载波频率的函数。雷达载波频率越高,对于给定相同多普勒滤波器带宽条件下的速度分辨率越好,这也是为什么大多数多普勒雷达都是高频的原因,脉冲串波形可以允许任何好的多普勒分辨率,并且其周期可以根据需求而改变,所以说,雷达是一个大的系统工程问题。
04速度模糊
脉冲串波形存在频域模糊,雷达系统利用多普勒滤波器组来测量多普勒频移,多普勒滤波器组的频率范围一般就是脉冲重复频率(PRF),因此,当多普勒频移在±PRF/2的范围内,就不会产生速度模糊。
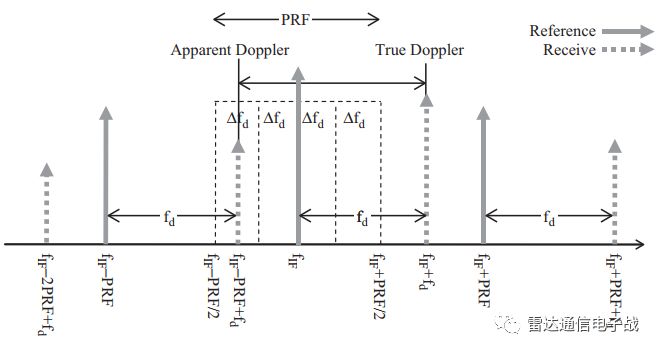
但当多普勒频移在±PRF/2的范围外,通过减去一个整数倍数的PRF就可以使其出现在-PRF/2〜+PRF/2。从频域转换到速度域带来不模糊速度,与多普勒频移为±PRF/2存在一定的关系。 一般来说,设计多PRF可以使回波在一个测量区域内模糊,而在另一个测量区域不模糊。另外,有一些雷达系统通 过使用连续PRF来解决距离或速度模糊问题,即距离PRF后紧跟速度PRF,反之亦然。
05速度跟踪
速度跟踪作为时间的函数表示对目标的速度进行跟随,即测算连续的速度变化量。“跟踪门”可以对周围指定速度的目标进行跟踪。雷达系统可以通过闭环控制系统自动跟踪目标,也可以通过操作者进行手动跟踪,或者两者结合起来使用。另外,可以选择性地对雷达系统多普勒滤波器组的输出进行监视查看。
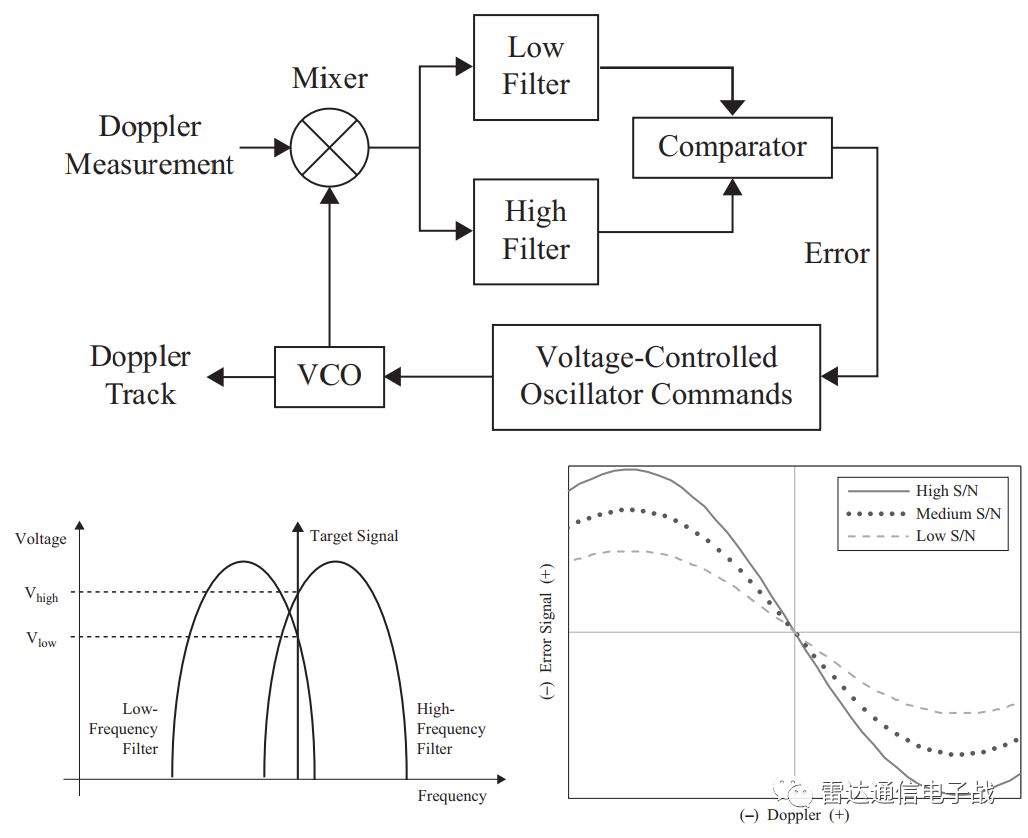
速度测量跟踪是通过在时域上跟随目标的多普勒移动来实现的。当单个目标被跟踪时,这个常用的速度跟踪技术就是“速度门”。这个技术可以在两个窄带多普勒滤波器之间区分接收目标。
审核编辑:汤梓红
-
 jf_87571596
2023-08-18
0 回复 举报有机会可以合作下 收起回复
jf_87571596
2023-08-18
0 回复 举报有机会可以合作下 收起回复
-
【TL6748 DSP申请】基于DSP的雷达测速监控系统2015-09-10 3698
-
国产测速雷达和进口比怎么样?2020-07-20 2786
-
基于ARM核心板AM335x设计高速公路广域雷达测速解决方案2020-09-29 1726
-
智慧交通广域雷达测速仪是什么2021-12-24 1201
-
通信基础知识教程2010-03-04 1006
-
基于DSP的车载雷达测速系统设计2010-11-08 976
-
雷达探测系统比较及雷达测速2011-04-11 1259
-
电源管理基础知识电源管理基础知识电源管理基础知识2017-09-15 1801
-
基于FSK的多车道测速雷达原理简述2021-09-26 1472
-
雷达移动式测速仪的特点是什么2022-01-11 1759
-
超速行驶如何扣分罚款?测速雷达又是如何工作的?2022-06-29 2214
-
测速雷达在固定、手持、移动与车载式雷达测速抓拍系统中的应用2022-07-08 2531
-
巍泰技术智能交通高速公路定点式测速仪雷达与移动测速仪雷达原理与应用2022-08-11 2975
-
巍泰技术卡口测速雷达解决方案2022-04-21 1448
-
雷达测速的基本原理 雷达测速的优势有哪些2024-02-03 4486
全部0条评论

快来发表一下你的评论吧 !
