

怎么制动电机?BLDC到底有哪些快速制动方法呢?具体怎么操作呢?
工业控制
描述
前言:
学会了启动电机,加减速电机,怎么制动电机?制动,又名刹车,也可称为刹车制动。制动的作用就是让高速旋转的电机停止。毫无疑问,这是做BLDC驱动必不可少的环节。通常新手同学会认为这很简单,把6个功率管关闭不就停机了?没错,关闭6个功率管后,电机最终肯定会停下来。但是,问题是对于中高速电机,这样停下来需要多长时间?看着慢慢悠悠停下来的电机,你心急不?遇到要求快速制动的产品,你怎么办?因此,仅关闭6个功率管的制动方法是不能满足产品开发需求的。那么问题来了,BLDC到底有哪些快速制动方法呢?具体怎么操作呢?本文就针对此做一梳理。
1. BLDC制动分类
BLDC制动分为两类:机械制动和电气制动。
机械制动,需要使用专用的电磁制动器,俗称"电磁抱闸"。一般用于要求制动非常快的场景。本文不做分析。 电气制动,则是使用逆变电路改变电磁条件,产生制动力矩,达到快速制动的目的。BLDC常见电气制动包括:回馈制动、反接制动和短接制动。
2. 回馈制动
同样先看逆变电路图,如下图1。
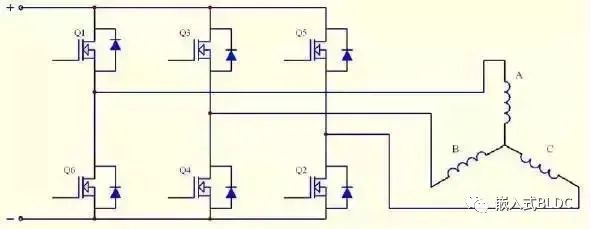
图1 如上图3,上管分别是Q1、Q3、Q5,下管分别是Q6、Q4、Q2。电机线圈ABC。
回馈制动就是使用互补输出的PWM驱动电机。在制动的时候,首先降低PWM占空比,然后,等电机减速到低速的时候,再关闭PWM输出。那么,回馈制动是怎么达到制动效果的?分析如下。
假设AB导通(A上管Q1和B下管Q4导通),且A上下管PWM互补输出,即如A上管Q1导通,那么A下管Q6则关闭;如A上管Q1关闭,那么A下管Q6则导通。此情况下,在一个PWM周期内,逆变电路的电流流向分别如下图2和图3。
A上管Q1导通,A下管Q6关闭,逆变电路电流方向如下图2。
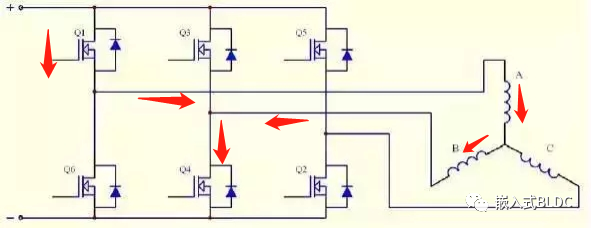
图2 A上管Q1关闭,A下管Q6导通,刚开始因电机线圈电感作用,电流会保持图2方向。但是,随着时间推移,因线圈反电动势的存在,所以电流会慢慢反向。最终逆变电路电流方向下如图3。
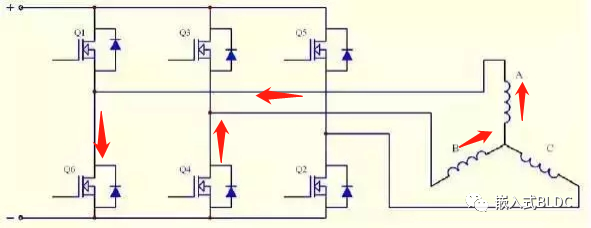
图3 对比图2和图3,可知线圈AB中电流反向了。电流反向,则磁场反向;磁场反向,则电磁力矩反向,此时,电动力矩变为制动力矩,电机进入制动状态。注意此时,制动的能力源于电机线圈存储的电能,即使用电机线圈存储的电能用于制动。
综上,在回馈制动中,只要PWM不是满占空比输出,那么在每一个PWM周期中,都存在驱动和制动两个阶段。加速阶段,PWM占空比逐渐增大,制动时间越来越短;减速阶段,PWM占空比逐渐减小,制动时间越来越长。
3. 反接制动
反接制动就是根据线圈当前电流方向,突然施加反向电压,形成反向电流,使电磁转矩反向,从而达到快速制动的目的。
同样,以假设AB导通(A上管Q1和B下管Q4导通)为例说明反馈制动的原理。AB导通时电流方向如上图2。如果要让电流突然反向怎么办?毫无疑问,是让BA(B上管Q3和A下管Q6导通)导通。此情况下电流方向如下图4。
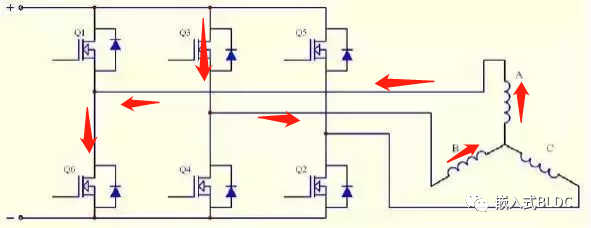
图4 导通BA电流反向,电磁转矩反向,一定会起到制动效果。但是,导通BA多长时间?一方面,如果时间太长,那么电机就会反转;一方面,有资料显示,反接制动时电流会翻倍(本文不做计算),虽然能达到快速制动,但是也存在烧毁电机(超过额定电流2.5倍)的风险。
因此,反接制动时,电机转速不能太高,且需要控制制动时间。因此,实际使用反接制动的时候,首先需要降低电机转速,然后,在某个中低转速区间,再做制动时间调整。制动时间,需要根据转速反复试验,确保不会反转。
4. 短接制动
短接制动就是将逆变电路上管(或者下管)全部导通,下管(或者上管)全部关闭,使电机三组线圈短接。因电机在惯性转动过程中,三线圈处于发电状态,所以短接三线圈,等效于电源短路。又因线圈内阻通常很小,因此,短路电流会很大。很大的短路电流,就会产生很大制动转矩,从而达到快速制动的目的。
短接制动时,逆变电路中电流方向变化较为复杂。本文就不再画图说明。
短接制动过程中,可以通过不同PWM占空比调节短路电流大小,以避免短接过程中出现太大短路电流。当电机处在中高速时,PWM占空比可以控制在30%以内;当电机转速在中低速时,可满PWM占空比短接。小PWM占空比和满占空比短接时间可根实际情况调整。
下图5是逆变电路三下管短接制动的波形。通道1、2和3是相电压波形,因短接都为0。通道4为其中一相电流波形。
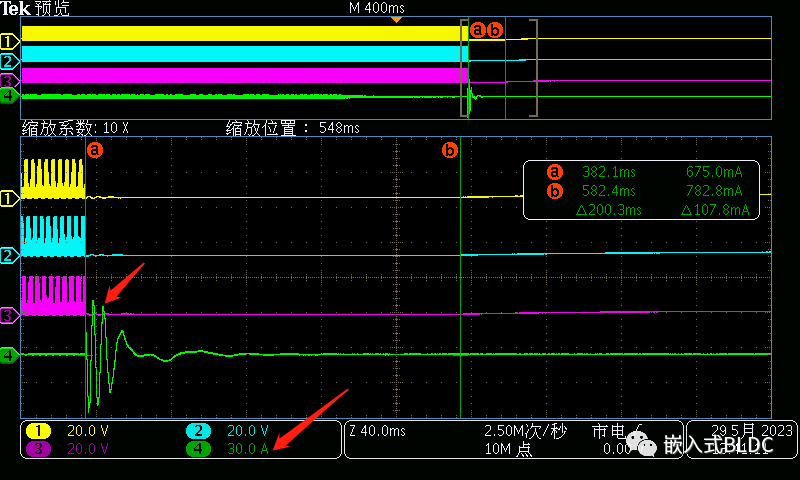
图5 由图5可知,短接制动过程中,短路电流是很大的。如果短路电流太大,那么一方面可能烧毁功率管;另一方面,电机线圈发热也会很严重。因此,一定要严格按照先使用小PWM使电机减速到中低转速,然后再使用满PWM占空比短接。
小结:
(1)回馈制动最省心。PWM互补输出即可。
(2)反接制动需要要防止反转。需要先减速,再反接。减速和反接时间,根据实际情况调整。
(3)短接制动要防止大电流。需要先使用小PWM占空比减速,再使用满PWM占空比短接。减速和短接时间,根据实际情况调整。
审核编辑:刘清
-
伺服电机的三种制动方式有什么区别?2025-09-19 2782
-
电机试验电源制动单元工程化计算及应用2025-04-27 305
-
电源反接制动和倒拉反接制动有何异同点2024-09-19 3226
-
其利天下技术·BLDC制动有哪些方法?无刷电机电机驱动方案2024-05-29 65046
-
为什么直流电机无法进行动态制动呢?2024-02-02 1675
-
请问电机的制动方式有哪些?2023-12-11 635
-
直流电机的制动方式有哪些?2023-03-13 1944
-
伺服电机的再生制动和电磁制动介绍2023-03-07 2015
-
刹车电机和制动电机结构原理2021-09-03 4261
-
制动电机的工作原理_制动电机的应用2019-12-18 12135
-
如何实现直流有刷电机断电时候开始制动?2019-10-30 7704
-
什么是直流无刷电机的机械制动?2019-09-17 9339
-
SDK制动电机有多少控制权2018-10-08 2033
-
电机测试如何选择负载制动器2015-10-21 2340
全部0条评论

快来发表一下你的评论吧 !
