

什么是数字阵列雷达(DAR),数字阵列雷达的基本原理
RF/无线
1851人已加入
描述
数字阵列雷达(Digital Array Radar,DAR)是使用数字技术对传统阵列雷达进行现代化改造后的产物。它采用数字波束形成技术、数字接收和处理技术、大规模集成电路技术和微处理机技术,从而大大提高了雷达的性能和功能。数字阵列雷达的基本原理主要包括数字波束形成和数字接收处理: 数字波束形成:是指通过将每个阵元接收到的信号进行适当的时间延迟和加权后叠加,使得阵列在特定方向上的增益最大,从而实现了对信号源的定向接收。这个过程是通过数字方式实现的。
数字接收处理:是指通过对接收到的信号进行数字化处理,如滤波、检测、跟踪、识别等,以提高雷达的性能和功能。
DAR特点
1. 灵活性:数字阵列雷达可以根据需要随时改变波束的指向和形状,具有很大的灵活性。
2. 抗干扰能力强:通过数字方式处理信号,可以有效地抑制各种干扰,提高雷达的抗干扰能力。
3. 高精度:数字阵列雷达可以提供比传统阵列雷达更高的测量精度。
4. 多目标处理能力:通过数字方式处理信号,可以同时处理多个目标,具有很强的多目标处理能力。
5. 信息处理能力强:数字阵列雷达具有强大的信息处理能力,可以实现对目标的识别、分类和跟踪等。 在MATLAB中,数字波束形成可以通过以下几个步骤简单实现:
1. 定义阵列:首先,你需要定义你的阵列的参数,包括阵元的位置、数量、间距等。
2. 定义信号:例如信号的频率、波长、采样率等。
3. 定义波束的指向:通常用方位角和俯仰角来表示。
4. 波束形成:最后,使用上述参数进行波束形成。
N = 32; % 阵元数量
c = 3e8; % 光速
fc = 10e9; % 信号频率
lambda = c/fc;
d = lambda / 2; % 阵元间距(单位:波长)
ang = [0;0]; % 波束指向(方位角和俯仰角,单位:度)
array = phased.ULA('NumElements',N,'ElementSpacing',d);
% 波束形成
beamformer = phased.PhaseShiftBeamformer('SensorArray',array,...
'OperatingFrequency',fc,'Direction',ang,'WeightsOutputPort',true);
[w, ~] = step(beamformer, repmat(ones(N,1),1,N));
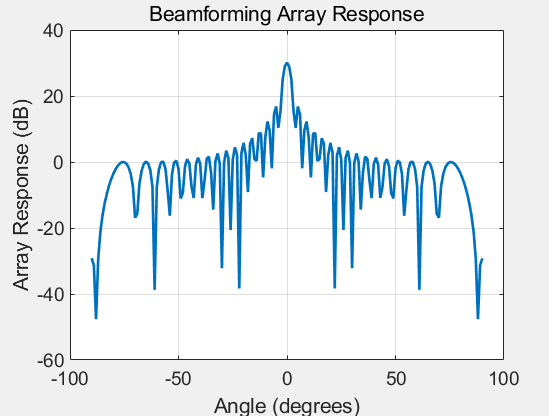
% 阵列响应
resp = phased.ArrayResponse('SensorArray', array,...
'WeightsInputPort', true);
angles = -9090; % 定义角度范围
P = step(resp, fc, [angles;zeros(size(angles))], w);
% 画图
figure
plot(angles, mag2db(abs(P)), 'LineWidth',2)
grid on
xlabel('Angle (degrees)', 'FontSize',14)
ylabel('Array Response (dB)', 'FontSize',14)
title('Beamforming Array Response', 'FontSize',16)
set(gca, 'FontSize',14)
以上代码是简单的阵列定义和波束形成过程,实际应用中可能需要考虑更多的参数和因素,如阵列的类型(线阵、面阵等)、波束的宽度、波束形成的各种方法等,以及信号的特性(是否包含噪声、是否为相干信号等)。
以上代码仅供参考。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
DC-DC电源模块在数字阵列雷达的应用方案2025-11-11 11143
-
磁盘阵列技术原理2011-02-26 1403
-
用于汽车防撞雷达的波束赋形阵列天线设计2017-12-14 12096
-
[9.2.1]--9.2数字阵列雷达组成与分类jf_75936199 2023-02-01
-
汽车雷达:阵列天线设计步骤2020-06-15 4290
-
数字阵列雷达:零中频接收机的优缺点2020-08-29 4868
-
深入了解主动电扫描阵列(AESA)雷达系统2021-05-24 4060
-
麦克风波束成形的基本原理和阵列配置是什么?2021-06-01 2696
-
求大神分享雷达导论PART-III.4电子扫描阵列设计2021-09-30 1264
-
电阻阵列DAC,电阻阵列DAC基本原理是什么?2010-03-24 6308
-
数字阵列雷达工程实现难点2018-03-01 1019
-
浅析有源电子扫描阵列雷达2023-04-07 5336
-
数字阵列雷达系统的基本框架和工作原理2023-09-05 8650
-
雷达测速的基本原理 雷达测速的优势有哪些2024-02-03 4468
-
阵列式雷达流量监测站-案例分享2025-09-11 1581
全部0条评论

快来发表一下你的评论吧 !
