

图腾柱TCM之两相变频错相的两种方法
电子说
描述
这种TCM拓扑的变频错相跟LLC的那种开环变频错相是不一样的,首先环路只知道要发出来的Ton是多少,不知道实际周期Ts将会是多少,以及两个桥臂的相差将会是多少,而且每相的实际Ts都可能不一样,所以需要实时检测然后再实时修正的。
目前而言,TCM的错相方法有两种:开环180deg固定错相,以及闭环实时调节错相;在我们的代码中,我们同时采用了这两种方法。
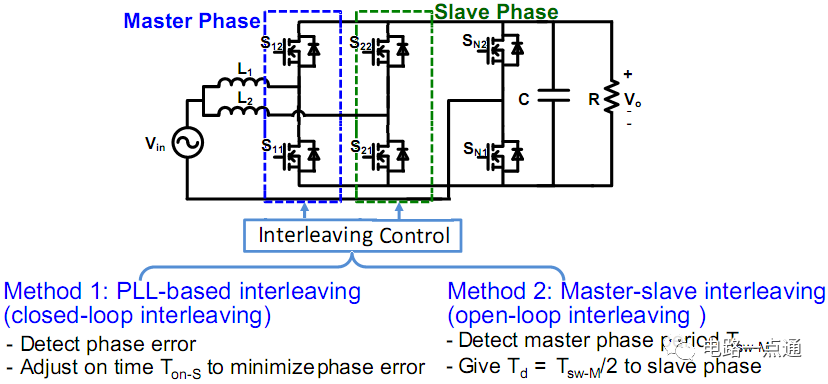
图12 两种错相方法 (1) 开环错相 在每次AC过零起步时设置了预制错相,就是第一次发波就可以实现两相180deg错相一步到位,但仅仅是在AC过零后恢复发波的第一拍才这样做,就是借鉴了开环错相的原理:让主相先发波,然后再强行更改从相的CTR让从相的PWM延迟主相Ts/2发波即可;
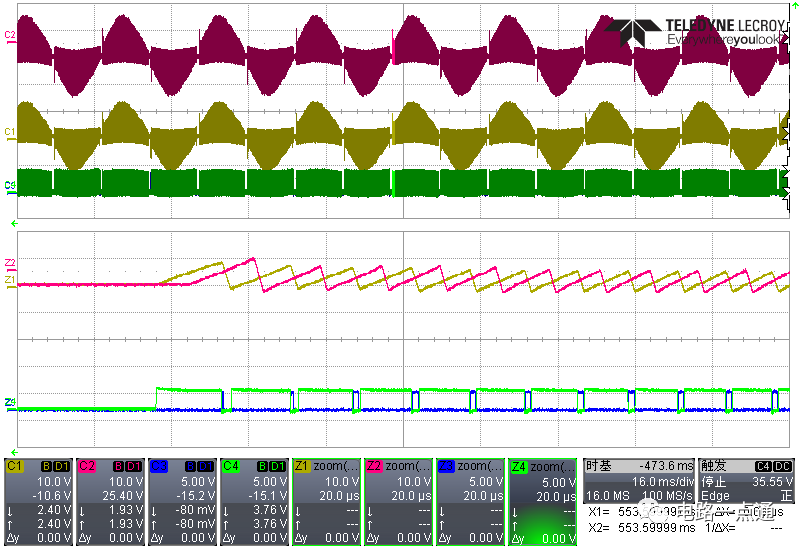
图13 预置错相效果 (2) 闭环错相 在正常工作以后,为了提高效率,我们要保证时时刻刻都能实现TCM ZVS控制,所以不适合采用开环固定错相的控制方法,最终我们采用了闭环错相策略; 主桥臂的Ton不变,然后通过实时调节错相臂的Ton来实现错相的,计算公式如下,Tshift就是错相角度;

理论上,如果完全错相好的话Tshift=0,两个桥臂的PWM相位刚好差别Ts/2的,所以我们错相环路的给定就是 ;然后就需要检测两个桥臂发出的PWM的真实相差是多少来作为错相环路的反馈,当然最直接最准确的方法就是直接用硬件检测发出来的两桥臂的Vgs上升沿或下降沿的时间差别,然后再通过硬件电路回送给DSP来作为错相环路的反馈。
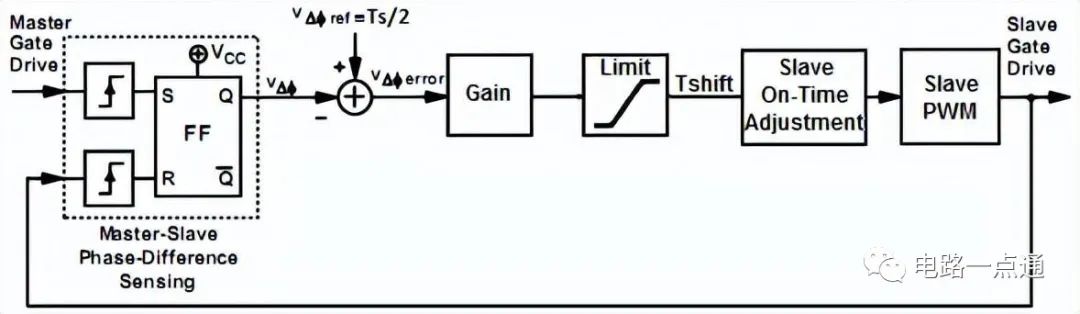
图14 错相环环路示意图 但是硬件采集相位差作为反馈(比如采用上图中示意的RS触发器去捕获两桥臂驱动的上升沿)需要增加额外的检测电路,所以我们采用软件的方式来作错相检测。众
编辑:黄飞
-
基于小华HC32F334的两路交错无桥图腾柱TCM PFC参考设计2025-03-26 6721
-
Linux端口的开启的两种方法需要掌握2022-11-28 1761
-
两相SVPWM原理及经典两相SVPWM算法2016-03-30 1119
-
交流电机两相变频软启动控制原理2016-04-25 834
-
提升家里网速的两种方法2020-02-19 17057
-
STM32操作矩阵键盘的两种方法——扫描和中断2021-11-26 2089
-
LDO在IoT中省电的两种方法2022-11-04 652
-
两相电机电容怎么接线方法2023-03-01 55112
-
图腾柱TCM控制方式的特性2023-03-22 4924
-
简述安装打印机驱动的两种方法2023-04-04 7446
-
交错TCM图腾柱无桥PFC仿真2023-06-23 7834
-
图腾柱和互补推挽有什么区别?为什么PWM驱动芯片用图腾柱?2023-12-07 6397
-
什么是两相电和三相电?三相电和两相电有什么区别?2023-12-25 11565
-
PMP40988:可变频率、ZVS、5kW、基于 GaN 的两相图腾柱PFC参考设计2025-02-24 1721
-
两路交错无桥图腾柱TCM_PFC 参考设计2025-06-24 587
全部0条评论

快来发表一下你的评论吧 !
