

一文详解导航系统的惯性技术原理
MEMS/传感技术
描述
我们驾驶汽车,按着GPS或北斗导航的指示行驶在陌生道路上,当穿越隧道时导航系统依然可以为我们提供方向、速度、里程、时间等行驶数据,我们惊叹于脱离了卫星系统的信号接收,导航系统如何运行?这就是惯性技术为我们续航。
惯性技术
惯性技术是用来实现运动物体姿态和运动轨迹控制的一门技术,它是惯性仪表、惯性稳定、惯性系统、惯性制导和惯性测量等相关技术的总称。惯性技术涉及物理、数学、力学、光学、材料学、机密机械学、电子技术、计算机技术、控制技术、测量技术、仿真技术、加工制造及工艺技术等,是一门多学科交叉的技术,主要研究惯性仪表和惯性系统的理论、设计、制造、试验、应用、维护,广泛应用于航空、航天、陆地导航和大地测量、钻井开隧道、地质勘探、机器人、车辆、医疗设备等,以及照相机、手机、玩具等领域,总之,敏感物体的运动姿态和轨迹、定位和定向都少不了它。
惯性技术是现代精确导航、 制导与控制系统的核心信息源.。在构建陆海空天电 (磁) 五维一体信息化体系中,在实现军事装备机械化与信息化复合式发展的进程中, 惯性技术具有不可替代的关键支撑作用。
惯性技术原理
惯性导航技术是惯性技术的核心和发展标志,惯性导航系统 (Inertia navigation system,INS) 利用陀螺仪和加速度计 (统称为惯性仪表) 同时测量载体运动的角速度和线加速度,并通过计算机实时计算出载体的三维姿态、 速度、 位置等导航信息。
陀螺仪就是惯性制导的基础
惯性导航系统有平台式和捷联式两类实现方案:前者有跟踪导航坐标系的物理平台, 惯性仪表安装在平台上, 对加速度计信号进行积分可得到速度及位置信息, 姿态信息由平台环架上的姿态角传感器提供;惯导平台可隔离载体角运动, 因而能降低动态误差, 但存在体积大、 可靠性低、 成本高、 维护不便等不足。
捷联式惯导系统没有物理平台, 惯性仪表与载体直接固连, 惯性平台功能由计算机软件实现, 姿态角通过计算得到, 也称为 “数学平台”。
惯导系统的基本方程 (比力方程) 如式 (1) 所示:

式中, 为载体的地速矢量,
为载体的地速矢量, 是加速度计测量值(比力),
是加速度计测量值(比力), 为地球转速,
为地球转速, 为平台相对地球的转速,
为平台相对地球的转速, 为重力加速度,
为重力加速度, 为哥氏加速度项,
为哥氏加速度项, 为离心加速度项。
为离心加速度项。
由于捷联系统中惯性仪表要承受载体角运动的影响, 故要求其动态范围大、 频带宽、 环境适应性好等, 对导航计算机的速度与容量要求较高. 捷联系统具有结构紧凑、 可靠性高、 质量轻、 体积小、 功耗低、维护方便、 成本低等优点, 也便于与其他导航系统或设备进行集成化、 一体化设计, 已成为现代惯性系统技术发展的主流方案。
惯性导航技术的特点
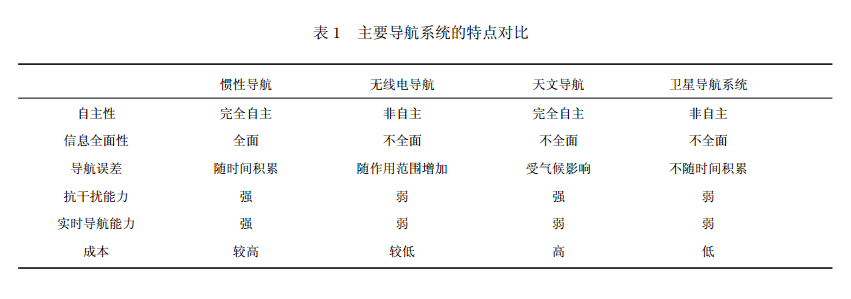
与其他导航系统相比, 惯导系统同时具有信息全面、 完全自主、 高度隐蔽、 信息实时与连续, 且不受时间、 地域的限制和人为因素干扰等重要特性 (见表 1), 可在空中、 水中、 地下等各种环境中正常工作。
在导弹、 火箭、 飞机等需要机动、 高速运行的运载体的导航、 制导与控制 (Guidance navigation and control, GNC) 系统中, 惯性系统因其测量频带宽且数据频率高 (可达数百赫兹以上)、 测量延时短 (可小于 1 ms), 易于实现数字化, 成为 GNC 系统实现快速、精确制导与控制的核心信息源, 其性能对制导精度起着关键作用, 例如, 纯惯性制导地地导弹命中精度的 70 % 以上取决于惯性系统的精度。
同时, 惯性技术还促进了最优滤波技术等先进控制理论在工程中实际应用. 作为发达国家严加封锁的国防关键技术, 惯性技术是现代各类运载体 GNC 系统功能实现的基础, 是制导武器或武器平台的支撑性关键技术。
除军用以外, 目前惯性技术在民用领域也有大量应用, 如大地测量、 石油钻井、 隧道工程、 地质勘探、 机器人、 智能交通、 医疗设备、 照相机、 手机、玩具等。因此凡是需要实时敏感或测量物体运动信息的场合, 惯性技术均可发挥重要作用。
惯性导航系统的主要不足是导航误差会随时间积累, 且成本相对较高. 随着其他导航技术尤其是卫星导航技术, 如 GPS 技术的成熟和广泛应用, 研究人员曾担心惯导技术未来的前景。
但是几次高技术局部战争中, 电子战、 导航战、 体系化作战模式的出现证明了几乎仅有惯性导航系统都能在强电磁干扰的极端恶劣环境下持续、 稳定地工作, 这进一步强化了惯性系统在武器装备中不可替代的地位。
惯性技术的发展历程
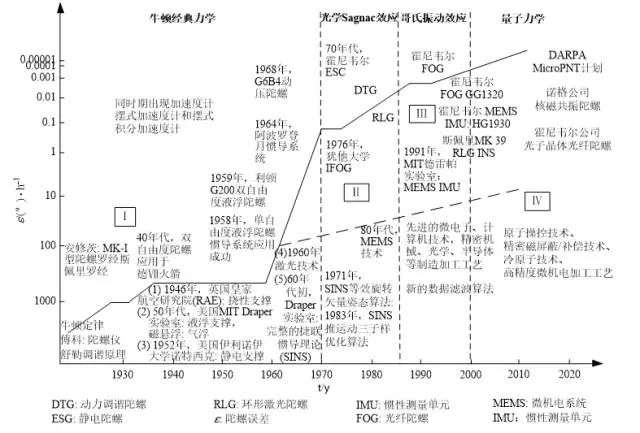
惯性技术已经历百余历史,其发展历程如图1所示。图中,折线下方为该阶段主要技术理论,上方为出现的惯性器件及其精度。且各技术发展阶段间并无完整界限。由图可见,按各类陀螺仪、理论和新型传感器先后,惯性技术发展通常分为四代。
惯性技术发展历程
第一代,基于牛顿经典力学原理。自1687年牛顿三大定律的建立,到1910年的舒勒调谐原理,第一代惯性技术奠定了整个惯性导航发展的基础。典型代表为三浮陀螺、静电陀螺以及动力调谐陀螺。特点是种类多、精度高、体积质量大、系统组成结构复杂、性能受机械结构复杂和极限精度制约,产品制造维护成本昂贵,典型产品有美国MX洲际导弹用三浮仪表平台系统。
第二代,基于萨格奈克(Sagnac)效应。典型代表是激光和光纤陀螺。其特点是反应时间短、动态范围大、可靠性高、环境适应性强、易维护、寿命长。典型产品是美国诺格斯佩里公司研制成功的Mk39系列和Mk49型激光陀螺捷联式舰船惯性导航系统、美国霍尼韦尔公司的激光捷联惯导系统。光学陀螺的出现有力推动了捷联惯性系统发展。
第三代,基于哥氏振动效应和微米/纳米技术。典型代表是MEMS陀螺、MEMS加速度计及相应系统。其特点是体积小、成本低、中低精度、环境适应性强、易于大批量生产和产业化。典型产品为美国霍尼韦尔公司HG1900、HG1930系列。MEMS惯性仪表的出现,使得惯性系统应用领域大为扩展,惯性技术已不仅仅用于军用装备,更是广泛用于各类民用应用中。
第四代,基于现代量子力学技术。典型代表为核磁共振陀螺、原子干涉陀螺。其目标是实现高精度、高可靠、小型化和更广泛应用领域的导航系统。其特点是高精度、高可靠性、微小型、环境适应性强。目前,DARPA研制的核磁共振陀螺精度能达到0.01(°/h) (1σ)的水平,斯坦福大学开发的原子陀螺精度可达6×10-5 (°/h)(1σ)水平。
惯性技术国内外发展状况
西方发达国家代表了惯性仪表技术的国际先进水平,以陀螺技术为例,其传统机械转子陀螺技术在经历了包括滚珠轴承支承、液浮支承、气浮支承、磁浮支承、挠性支承、静电支承在内的多种支承技术之后,已经达到非常成熟的地步;光学陀螺技术经过40余年的发展也已经达到了鼎盛时期;微机电陀螺技术以其产品在成本、尺寸和重量等方面的潜在优势正在经历高速发展期;新型陀螺技术也已得到重点关注和大力发展。我国在惯性技术领域与上述国际先进水平相比还存在一定的差距,主要原因在于理论研究的深度和广度不足,基础工业条件上的薄弱以及对惯性技术发展规律认识上欠缺。具体到技术上,体现在以下几个方面。
1、惯性仪表技术
我国的传统机械陀螺与国际先进水平之间的差距主要体现在仪表材料技术、超精密制造技术等基础工业方面,在技术的成熟度方面还有较大的发展空间。光学陀螺技术方面,国内在仪表精度、电子技术、仪表环境适应性技术、市场占有率等方面相对落后。国外的微机电惯性仪表技术进展迅速,批量生产的产品已经进入战术级应用领域,国内在这一精度领域的主导技术仍以动力调谐陀螺和光学陀螺为主,微机电惯性仪表在设计理论、制造工艺、集成电路技术、工程化技术等方面与国外相比还有相当大的差距;我国的微机电加速度计尚未开始广泛应用,机械加速度计在精度与稳定性方面也相对落后。惯性执行机构方面,国内在磁悬浮变速控制力矩陀螺技术、陀螺/飞轮一体化技术等方面与国外先进水平相比有一定差距。我国的半球谐振陀螺技术在仪表精度与稳定性、工艺技术等方面还落后于国际先进水平。在新型惯性仪表技术的基础研究上与国外相比也有差距。
2、惯性系统技术
我国的平台式惯性系统技术在制造工艺水平、元器件稳定性、材料技术等方面与国际先进水平相比有一定差距,在系统的长期稳定性方面也有待提高。捷联惯性系统技术方面,我国需要在惯性仪表精度、捷联算法的实际性能、系统成本与体积、功能及可靠性等方面进一步提高。在陀螺监控技术方面,国内的相关研究起步较晚,在一些重点技术环节上与国际先进水平相比还有差距,应用领域也有待拓展。
3、惯性基组合技术
我国惯性基组合技术与国际先进水平的差距主要体现在研究的原创性及工程应用方面,在各种辅助信息的测量获得、匹配理论、匹配算法等方面也落后于国际先进水平。目前,国内的惯性/卫星组合导航技术在系统的成熟度、新技术研究的验证和应用方面有待提高;在地磁导航的数据图精度、抗干扰补偿技术方面,在星光导航的星敏感器敏感芯片技术方面,在地形导航、视觉导航的应用技术方面,与国际先进水平相比均有一定的差距。
4、惯性领域测试技术与设备
惯性测试技术领域,我国在惯性仪表尤其是新型惯性仪表的测试方法和技术、误差来源与补偿等方面的研究上与国外先进水平相比还有差距;在惯性测量装置(IMU)与系统级的测试技术上,国内目前还主要集中在对分立标定方法的研究上,与国外的全参数一体化标定方法相比也有待提高。测试设备领域,我国在设备的角位置分辨率与测角精度、极限转速、大载荷高动态条件下的跟踪精度与结构刚性等方面落后于国际先进水平。
5、惯性应用技术
我国在惯性技术的应用方面与国际先进水平相比仍存在差距。在航天、航海、航空领域里,这种差距主要体现在惯性技术的应用范围、惯性仪表与系统的精度及可靠性、系统的体积与成本等方面;在陆用领域,国内在陆用惯性系统晃动及运动基座情况下的初始对准技术实用化方面,在系统的容错和故障诊断技术方面与国外相比有差距;在石油地质领域的高端惯性仪表技术方面有待提高;在机器人领域惯性系统的体积、长时间工作能力、精度和智能化等方面相对落后。
惯性导航技术的发展前景
1、惯性传感器的发展前景
就全球发展现状而言,现有的惯性传感器已经可以满足当前各种不同导航任务的精度指标要求。未来的主要目标是降低器件的成本、体积/重量和功耗等,具体包括以下几个方面:
① 材料和工艺:生产厂商采用低劳动密集型生产模式和批量处理技术,选用硅片、石英、或结合光电材料(如铌酸锂)等新型材料,制造惯性传感器。
② 成本:包括产品自身成本和操作维护费用。由于大规模的批量生产,惯性传感器成本在大幅下降。
③ 体积:惯性测量传感器在不断向轻量化、小型化、微型化方向发展;未来一些新型的惯性传感器将无法用肉眼识别,如:NEMS(Nano—Electro—Mechanical System)和光学NEMS 。
④ 研究热点:一方面集中在小型化MEMS惯性器件的性能提高和有效封装上,另一方面集中在光学传感器上,尤其是对采用集成光学的FOG的研究。
⑤ 期望:在各个精度级别上,均能获得尺寸小且价格低廉的惯性传感器。
惯性传感器的发展情况直接决定了惯性导航系统的开发和应用,惯性传感器自身的成本、体积和功耗影响了惯性导航系统的相应参数指标。因此,惯性测量传感器的发展须要权衡以下几个因素:精确性、连续性、可靠性、成本、体积/重量、功耗。
2、惯性导航技术的发展方向
惯性导航系统的设计和发展须要考虑权衡的主要因素有:①必须针对并满足应用的需求,其中导航性能(尤其是精度)和价格成本是首要的两个特性指标。价格成本包含系统自身成本、维护成本和使用寿命。因此对于很多导航应用,合理的价格仍然被置于应用要求的最前面。导航性能包括:导航的精确性、连续性、完整性、易用性,易用性是指系统易于使用和维护、系统的自主性等。②实际的应用环境是最大的挑战。系统的体积、功耗、可靠性和可用性会关系到惯性导航系统能否在具体的应用环境中被采用。③提高惯性导航系统的通用性,拓展应用领域。
惯性导航系统发展和技术进步呈现以下特点:
(1)在无法接收GNSS信号或需要高度导航可靠性的应用场合,高性能的自主INS仍具有不可替代的作用。
(2)GNSS技术的快速发展和进步,将取代部分传统的INS应用领域。例如:Raytheon Anschütz采用GPS和固态速率传感器研制的GPS罗经,可以实现0.5°(RMS)的航向精度。上海交通大学导航、制导与控制研究所研制GPS姿态测量仪,在1m基线的情况下可获得优于0.2°的2-D姿态测量精度。
(3)INS与其他多种导航手段组合,尤其是GNSS/INS组合导航系统 ,受到普遍关注。
(4)地面车辆导航等民用市场发展迅速,价格低廉的一体化、小型化、多模式组合导航设备成为市场发展的三个重要方向,这既是惯性导航系统发展的机遇,也是挑战。
(5)针对舰船导航系统的设计和发展:①首先从系统的性能和可靠性方面考虑,须要不断提高惯性导航系统自身的集成度;使其具备与其他导航手段协同工作的组合导航模式,并且提供与舰船的其他操作控制或导航设备灵活接口。② 其次从降低系统成本角度考虑,很多学者尝试采用中低精度的惯性测量传感器或MEMS器件,通过改进导航系统配置、与其他导航手段相结合来获得令人满意的精度指标H 矧。③ 须要指出的是:INS首先与GNSS组合,然后再结合声纳、图像等其他导航手段组成舰船一体化组合导航系统,是最受关注的研究热点和发展方向。
总之,在惯性器件研究方面,体积小且价格低廉的MEMS惯性传感器,和高精度、高性能FOG在未来一段时间仍将是受关注的焦点。受现代计算机技术快速发展的影响,平台式导航系统将被捷联式惯性导航系统所替代。
当前,惯性技术已经成为一国技术水平先进性的重要标志之一,其先进程度和应用水平关系到国家多个行业的信息化水平和自动化控制水平。目前惯性技术正朝着小型化、数字化、智能化、低成本、高可靠性、多领域应用的方向发展,新的应用与产品正加速涌现。随着国民经济和技术水平的进一步发展,未来惯性技术的应用领域也将持续扩展。
编辑:黄飞
-
组合导航系统中的惯性导航系统是什么?2025-06-18 1847
-
霍尼韦尔推出新一代惯性导航系统 HGuide-N3802025-06-04 1299
-
惯性导航系统的优缺点2023-07-06 7188
-
惯性定位导航系统赋能自动驾驶汽车2022-01-19 4120
-
求一款轮式小车惯性导航系统的设计方案2021-04-19 2383
-
详解GPS导航系统中的惯性技术2020-06-13 4428
-
惯性导航系统、加速度计、陀螺仪的原理2020-05-18 3600
-
惯性导航的工作原理及惯性导航系统分类2018-05-10 38550
-
INS惯性导航系统及 GPS/INS组合导航系统介绍2018-04-27 14389
-
基于FPGA的惯性导航系统设计2018-03-04 3832
-
导航系统中的惯性技术是怎样的?这篇文章讲得详细2018-01-06 17516
-
捷联式惯性导航系统2016-08-17 3343
-
基于加速度计的无陀螺惯性导航系统的研究2009-12-02 5887
-
VxWorks在惯性导航系统中的应用2009-03-29 675
全部0条评论

快来发表一下你的评论吧 !
