

RGBD相机的标定和图像配准
描述
1
kinect2相机简介
1、三种主要相机类型

2、常见的RGB-D相机

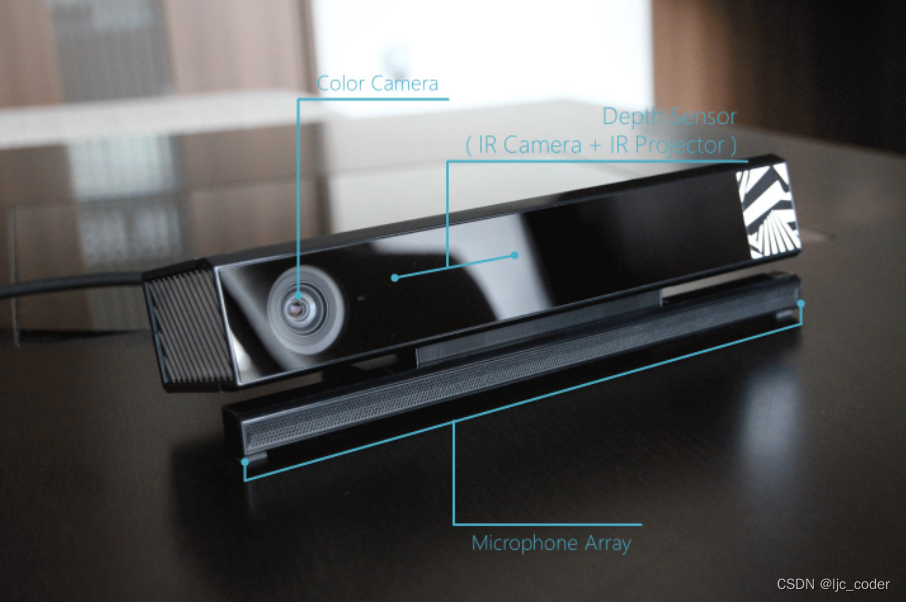
3、kinect2 相机
从左到右依次是:彩色摄像头;红外摄像头(深度摄像头),但这个要和再右边的IR Project(红外投射器)一起工作的;底下的长条是麦克风,可以感受到说话人的方向
3.1使用RGB-D相机的好处
可以直接通过拍摄的深度图得到物体的空间位置
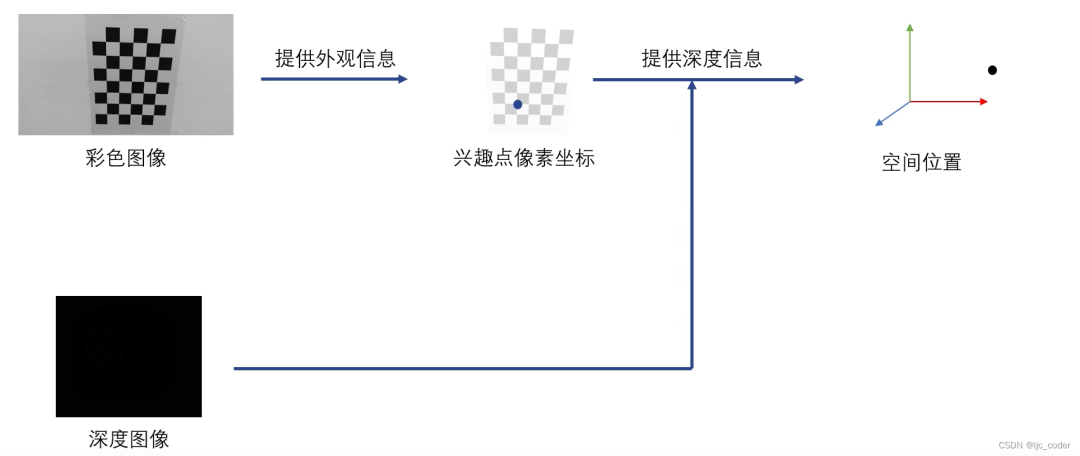
3.2问题
keinect相机 彩色图像是1920x1080的,但深度图是512x414的,因此需要深度校准
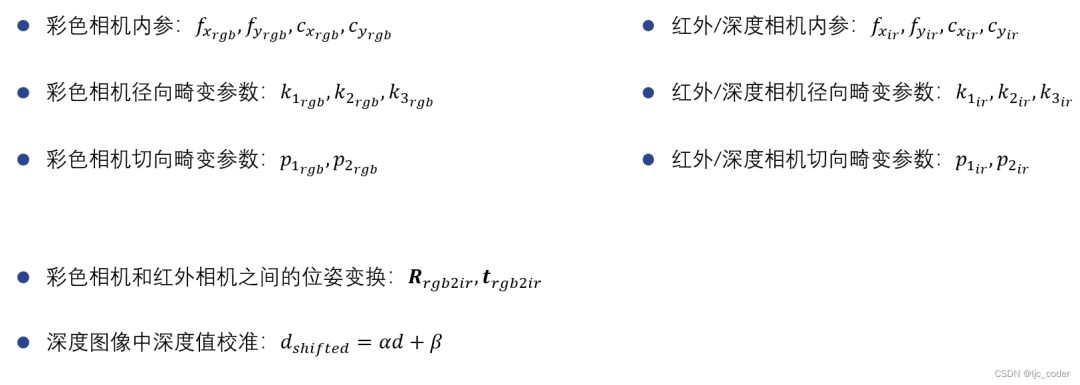
3.3实际标定得到的数据
2
内外参标定
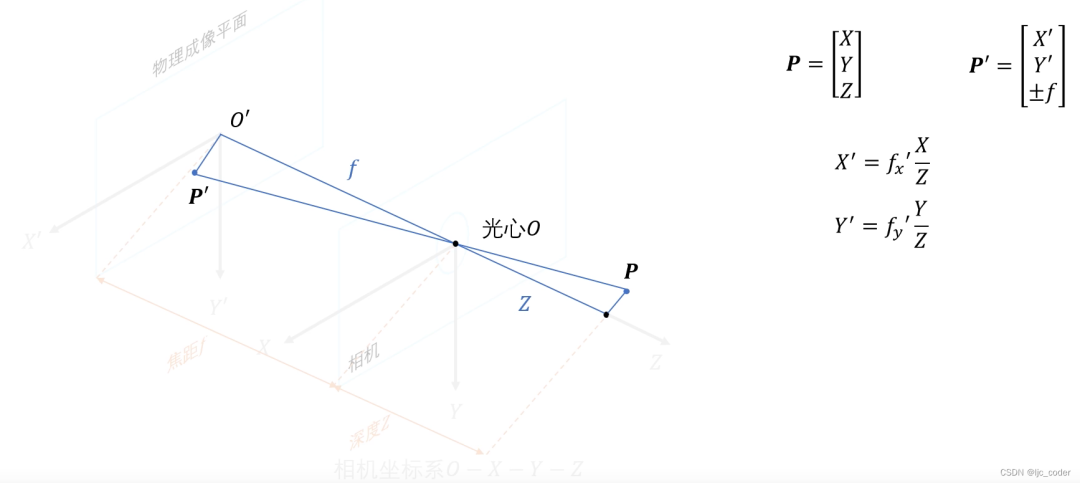
1、针孔相机投影模型
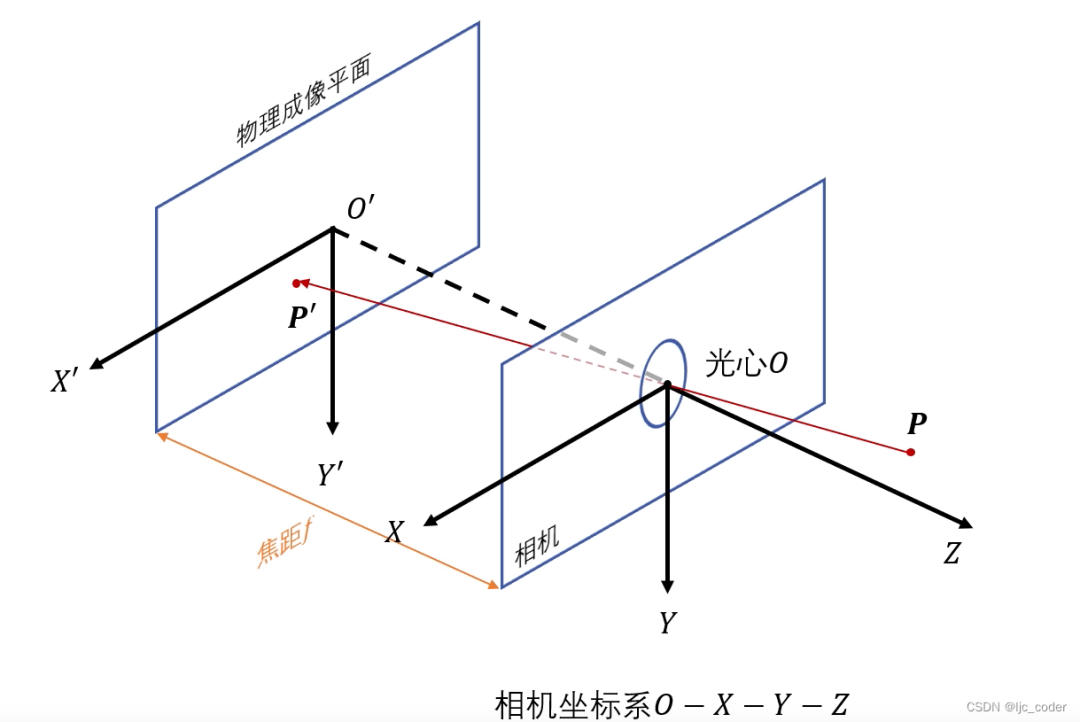
相机坐标系 -> 物理成像平面
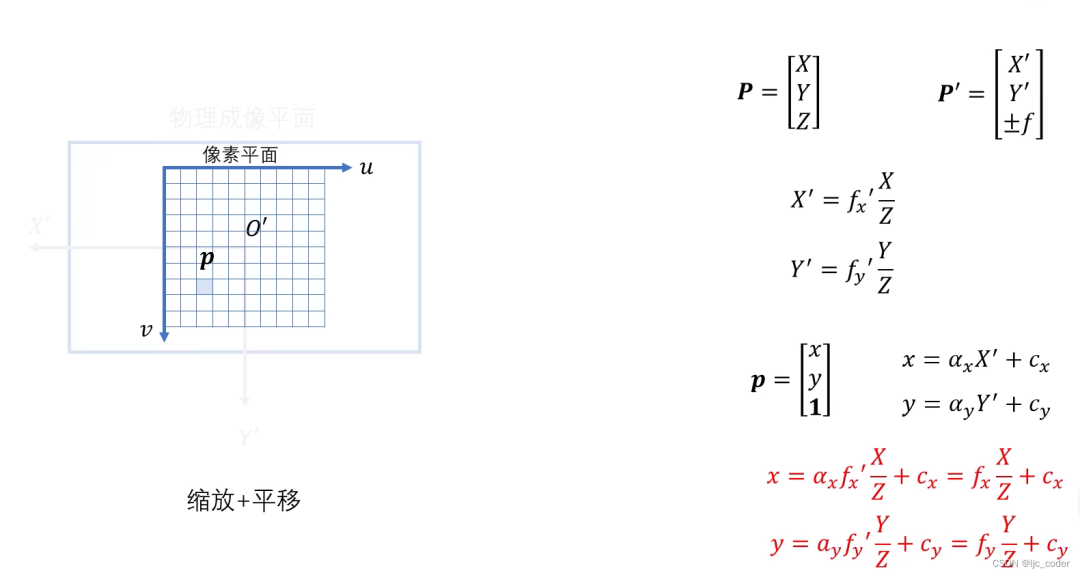
物理成像平面 -> 像素平面
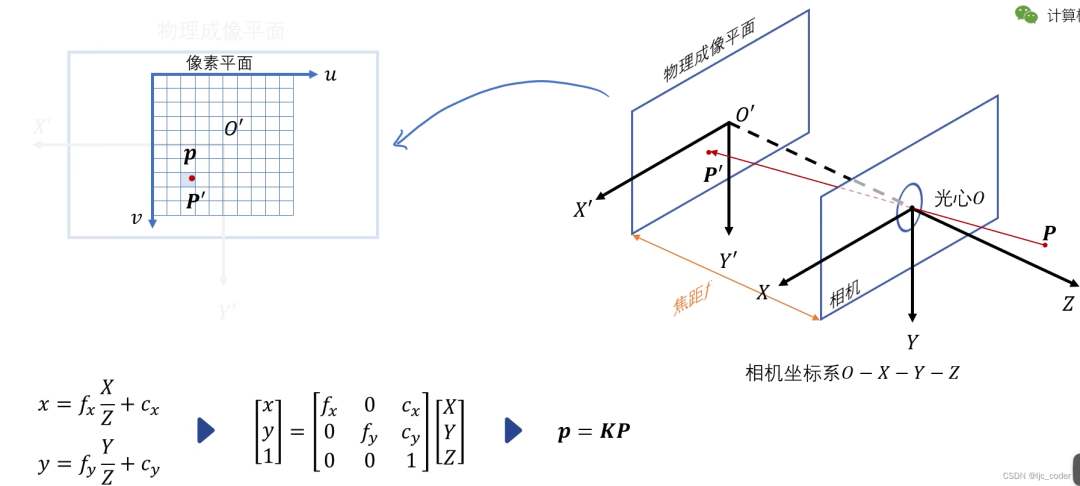
总结一下
整个投影过程都可以通过下面的内参矩阵描述 fx,fy,cx,cy
主要通过k1,k2,k3三个参数来描述相机的径向畸变(常用k1,k2就够了)
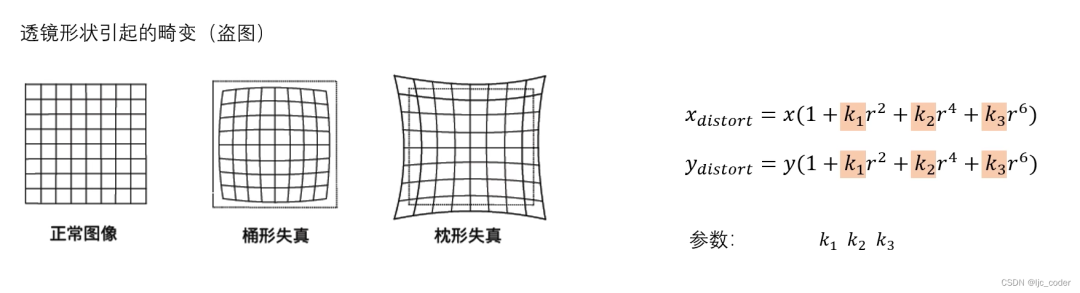
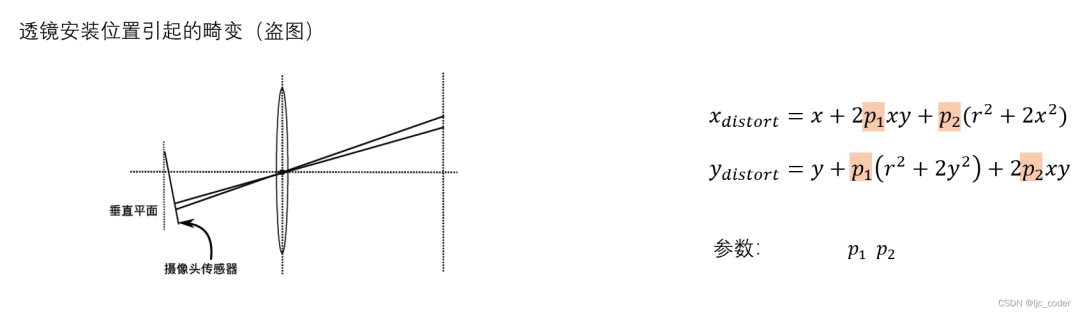
对于切向畸变,一般使用p1,p2来描述
2、工具
对于 kinect 可以用 iai_kinect2 工具包做标定
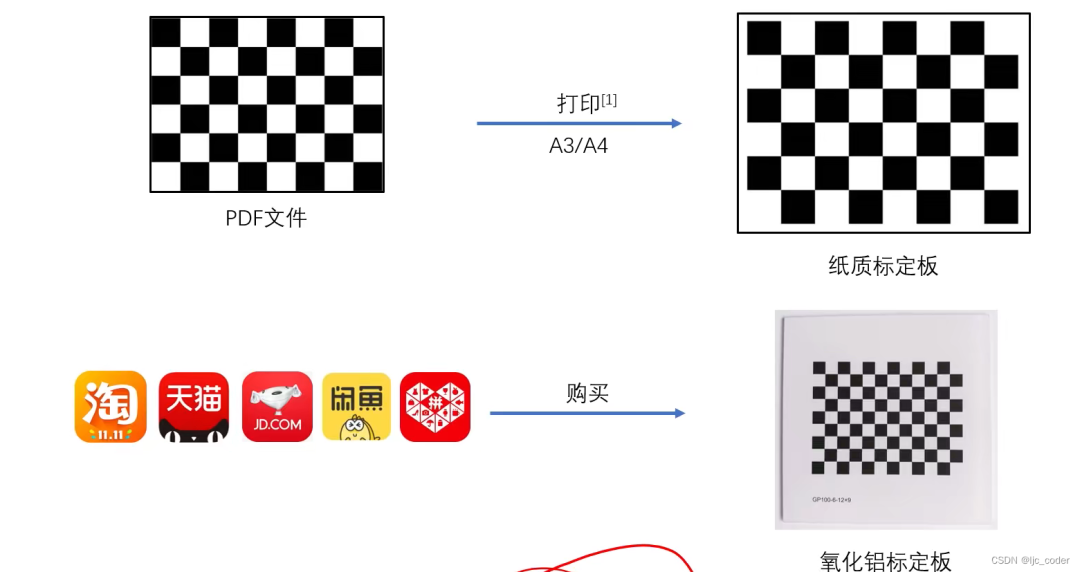
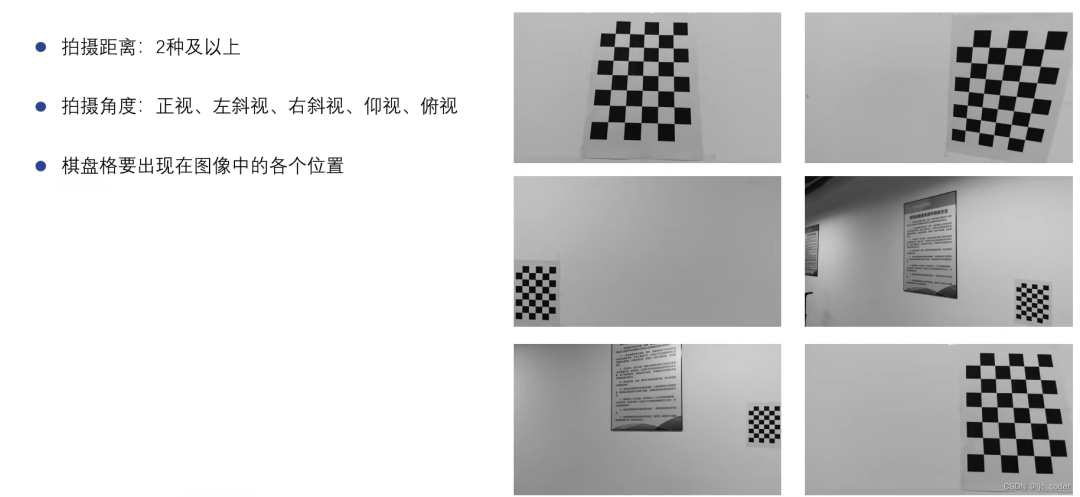
3、棋盘标定板
4、彩色相机标定
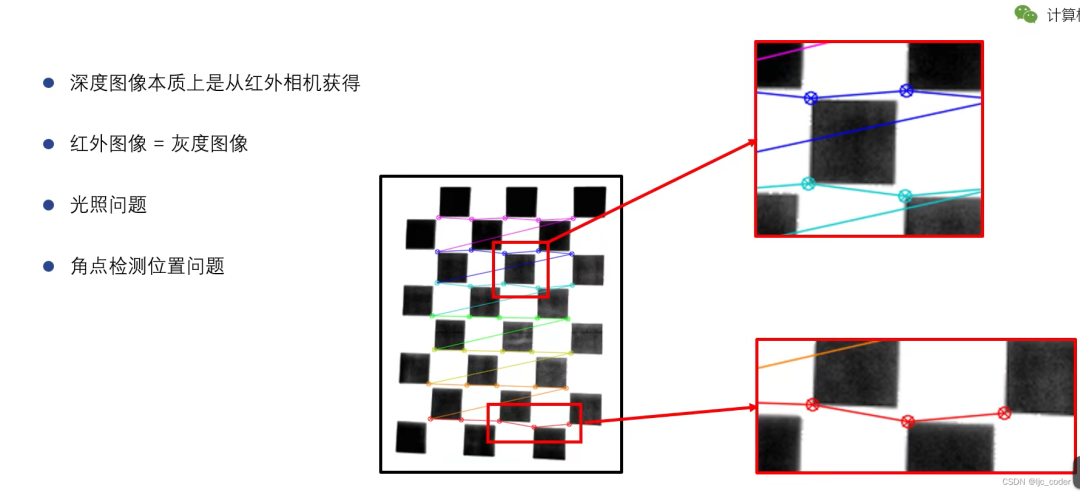
5、红外相机标定
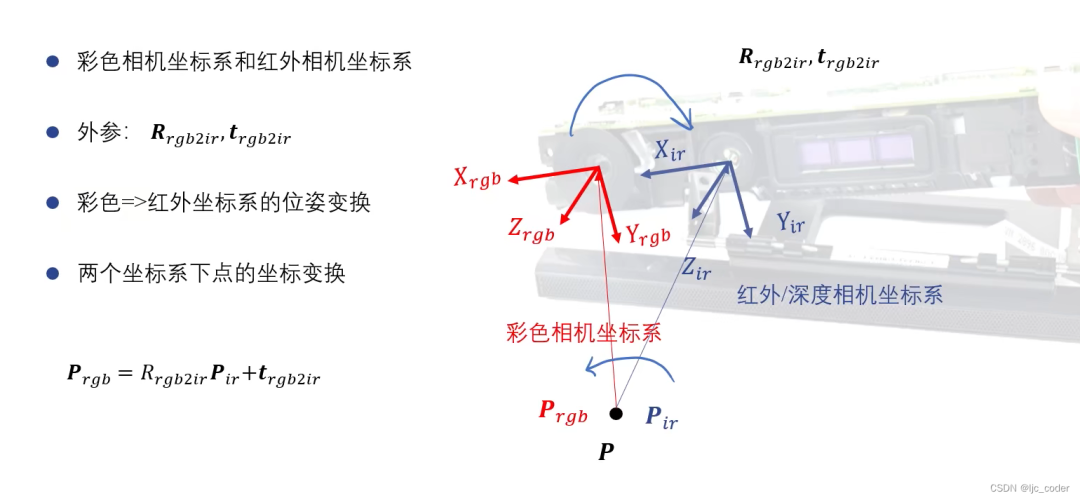
6、彩色相机和红外相机的外参标定
描述深度坐标系下的点如何表示在RGB图中
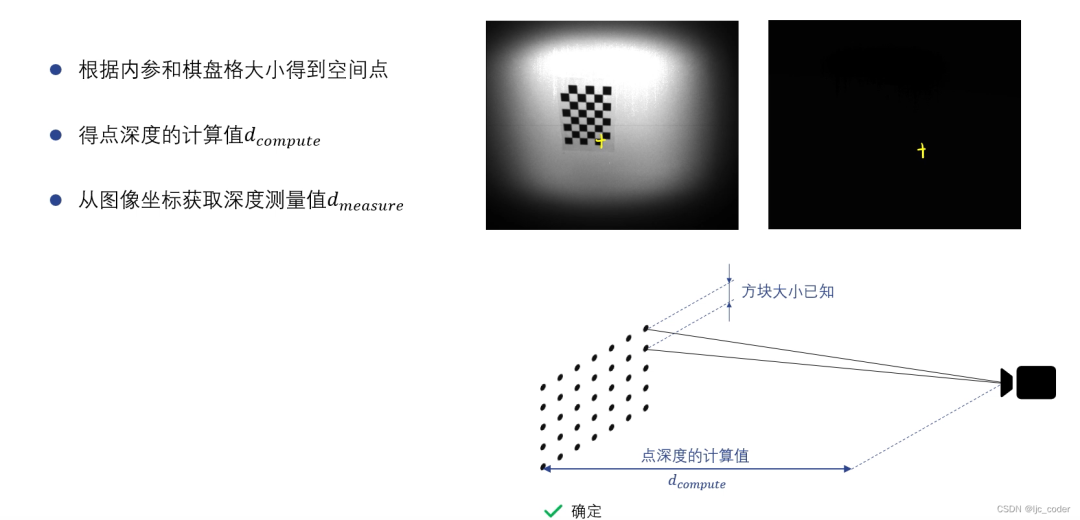
7、深度相机的深度校准
3
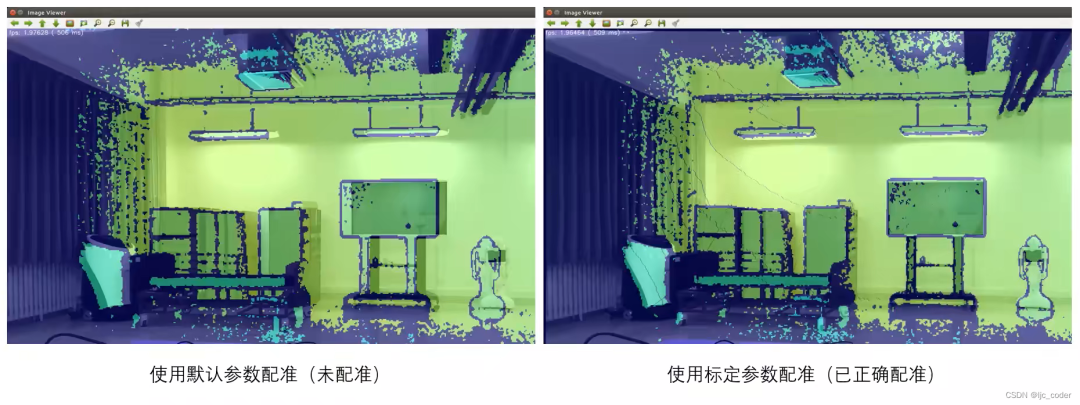
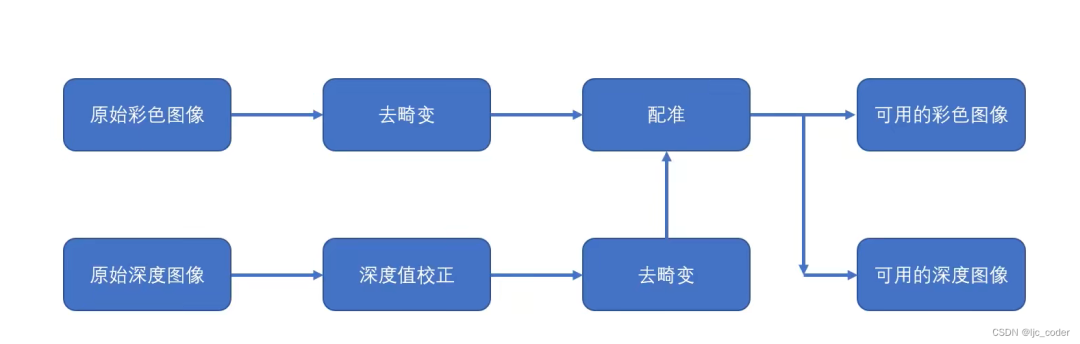
图像配准
1、配准原理
(配准后的深度图不对)
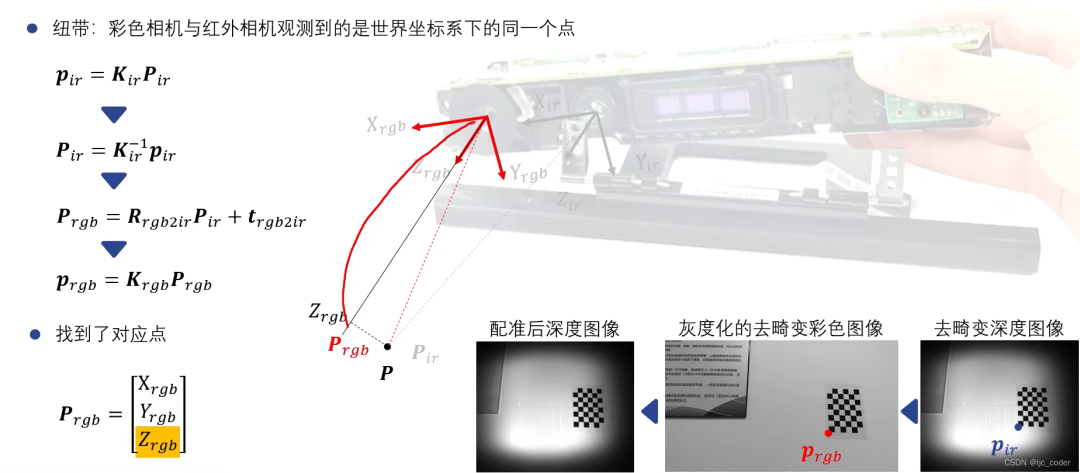
正确
4
总结
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器视学习笔记:图像配准2023-10-24 2763
-
如何学习相机模型与标定?2023-06-01 1334
-
相机标定含义(解决什么是相机标定)2022-06-21 9134
-
基于结构补偿配准的胸部多模磁共振图像2021-06-25 712
-
基于U-net分割的遥感图像配准方法2021-05-28 1024
-
基于SIFT特征的图像配准(仿真图片)2018-08-06 1470
-
基于GPU加速的医学图像配准技术2018-01-03 1231
-
具有SIFT描述的多尺度角点图像配准2017-11-17 1201
-
运动相机的多曝光图像融合技术2017-11-11 1295
-
基于特征点精度提纯的图像配准改进算法2017-01-07 825
-
SAR图像自动配准性能分析2011-04-28 1058
-
Powell和SA混合优化的互信息图像配准2010-02-21 835
-
使用仿射不变特征的遥感图像自动配准2009-04-03 799
-
基于互信息的功能磁共振图像配准2009-02-28 478
全部0条评论

快来发表一下你的评论吧 !
