

CVPR上的新顶流:BEV自动驾驶感知新范式
描述
在高级别自动驾驶功能应用中,车辆的智驾系统必须能够解决corner case,即罕见却又无法完全避免的极端场景。这些场景数据样本较少,一旦模型不能有效识别,可能引发严重的安全事故。
前段时间,百度在Create大会上的辅助驾驶板块发布了一个挺硬核的内容,或许能有效解决corner case,车路一体的BEV感知方案——UniBEV。
BEV自动驾驶感知好比一个从高处统观全局的“上帝视角”,将三维环境信息投影到二维平面,以俯视视角展示环境中的物体和地形。在路径规划、障碍物检测、自动驾驶决策等方面,BEV感知都展现出了其独特的优势。
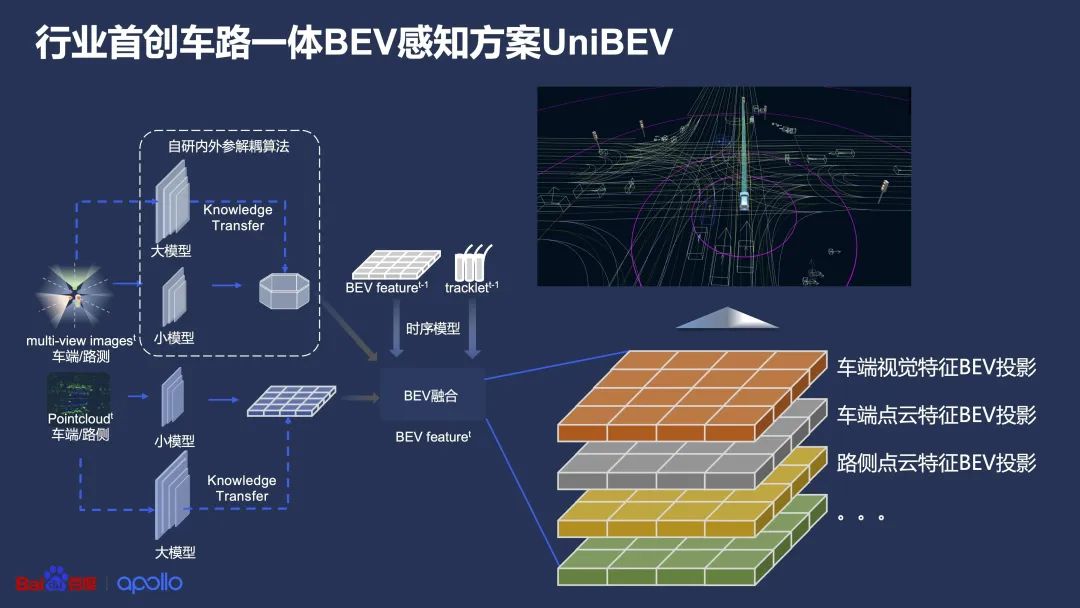
车路一体的BEV感知方案——UniBEV
路径规划:BEV感知可以将复杂的道路信息简化为一系列的路径点,使得路径规划更加简单、准确。
障碍物检测:BEV感知能够清晰地展示出车辆周围的障碍物,包括车辆、行人、道路标志等,使得障碍物的检测和识别更加准确。
自动驾驶决策:BEV感知可以为自动驾驶系统提供全面的环境信息,帮助系统做出更加智能的决策。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
未来已来,多传感器融合感知是自动驾驶破局的关键2024-04-11 2419
-
自动驾驶的到来2017-06-08 7479
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 6159
-
如何让自动驾驶更加安全?2019-05-13 3784
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 3312
-
自动驾驶汽车中传感器的分析2020-05-14 3636
-
自动驾驶技术的实现2021-09-03 3268
-
达摩院自动驾驶新突破 检测器登顶自动驾驶权威比赛2020-03-19 4221
-
自动驾驶感知新范式之BEV感知经典论文总结和对比(上)2023-06-07 812
-
利用Transformer BEV解决自动驾驶Corner Case的技术原理2023-10-11 2165
-
自动驾驶领域中,什么是BEV?什么是Occupancy?2024-01-13 4745
-
BEV和Occupancy自动驾驶的作用2024-01-17 1513
-
浅析基于自动驾驶的4D-bev标注技术2024-12-06 9940
-
浅析4D-bev标注技术在自动驾驶领域的重要性2025-06-12 3139
-
自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案2025-12-11 1600
全部0条评论

快来发表一下你的评论吧 !
