

车载摄像头的工作原理、分类及仿真验证
描述
01前言
目前,车载摄像头传感器是主流的自动驾驶系统传感器之一,视觉感知的方案也是大多数汽车厂商的感知融合方案的重要组成部分。摄像头技术成熟且价格适中,在未来很长一段时间都将会是自动驾驶系统传感器的优选方案。
02工作原理
车载摄像头由镜头、CMOS/CCD图像传感器、图像信号处理器以及串行器组成。它的工作原理是:物体表面反射的光线通过镜头入射到CMOS/CCD图像传感器,图像传感器将接收到的光信号转换为数字信号并传递给图像信号处理器,图像信号处理器对数字信号进行图像滤波和增强,并通过串行器对处理过的图像信息进行串行化后传输给域控制器。
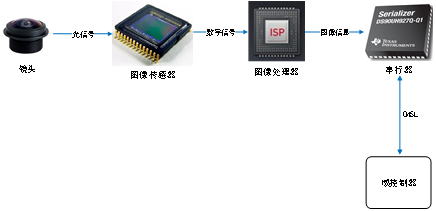
图1 车载摄像头工作原理示意图
摄像头重要参数包括:
焦距,是镜头光学中心到感光元件成像平面的距离,焦距与探测范围成正比,焦距越大,一般其探测范围就越远;
视场角,分为水平视场角和垂直视场角,描述摄像头的视野角度;
分辨率,摄像头画面中X轴像素点数乘以Y轴的像素点数,分辨率越高,画面越清晰;
信噪比,是信号电压对噪声电压的比值,信噪比越高表明产生的杂波信号越少,图像的信号质量也就越好;
动态范围,指拍摄的同一个画面内,能正常显示细节的最亮和最暗物体的亮度值所包含的那个区间。动态范围越大,过亮或过暗的物体在同一个画面中都能正常显示的程度也就越大。
03分类及其应用
车载摄像头根据安装位置分为五类:前视、后视、侧视、环视以及内置摄像头。
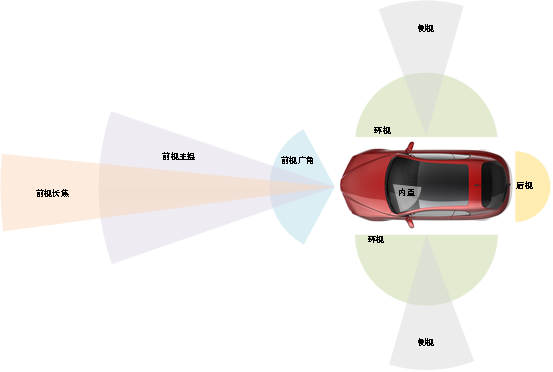
图2 车载摄像头布置图
前视摄像头,前视摄像头一般安装在前挡风玻璃的上方,用于目标识别和测距测速,根据功能,又可以分为前视主摄像头、前视广角摄像头以及前视长焦摄像头。
前视主摄像头,视场角60-80°左右,探测距离150m左右,用于监测车辆前方的宽阔视野,基本上能够覆盖大部分交通场景。
前视广角摄像头,视场角120° - 150°左右,探测距离在50 m左右的鱼眼摄像头,能够拍摄到交通信号灯、行驶路线上的障碍物和距离较近的物体,非常适用于城市街道、低速缓行的交通场景。
前视长焦摄像头,视场角30°左右,探测距离可达250 m以上,视野相对较窄,适用于高速行驶的交通场景。
后视摄像头,视场角120-140°左右,探测距离50 m左右。一般安装在后备箱上,主要功能是实现泊车辅助。
侧视摄像头, 视场角一般为 90°-100°,探测距离80 m 左右,安装在车辆两侧的中间位置,主要作用是检测侧向车辆及自行车。
环视摄像头,安装在车身四周,一般使用4-8个鱼眼摄像头,可分为前向鱼眼摄像头/左侧鱼眼摄像头/右侧鱼眼摄像头/后向鱼眼摄像头。用于全景环视功能的显示,以及融合泊车功能的视觉感知及目标检测。
内置摄像头,一般安装在中控台,正对着驾驶员的面部,用于监控驾驶员的驾驶状态,进行疲劳提醒等。
(1)摄像头的优点包括:
种类齐全,技术成熟,摄像头在日常生活中用处广泛,衍生出了不同焦距和视场角的产品,覆盖了车载的需求;
成本适中,相比于昂贵的激光雷达,摄像头的价格是更加低廉的;
性能强大,摄像头能够探测到物体的颜色、纹理、轮廓、亮度信息,对于识别红绿灯、交通标志这种带有颜色特征的目标具有独到的优势。
(2)摄像头的局限性体现在:
摄像头传感器易受光线影响,在黑夜、雪天、雨天等能见度下降的条件下,摄像头的性能会下降;
摄像头传感器的测试测距能力略差于雷达,雷达可根据多普勒效应直接计算目标的距离和速度,摄像头则依赖算法估计,准确性不如雷达。
04仿真验证
摄像头的仿真验证是自动驾驶系统仿真的一部分,主要有两种形式:一种是暗箱仿真,另外一种是视频注入。
暗箱仿真,预先准备一个暗箱,内置高清显示器、增距透镜以及摄像头支架,将待仿真的摄像头放在支架上,通过调整支架使显示器、透镜、摄像头的中心点在同一条水平线上。显示器播放仿真的场景画面,使用增距透镜对画面进行放大,确保放大后的画面能够布满摄像头感光元件的表面。摄像头通过增距透镜实时拍摄放大后的画面,并将图像信息处理后回传,就完成了摄像头的仿真。
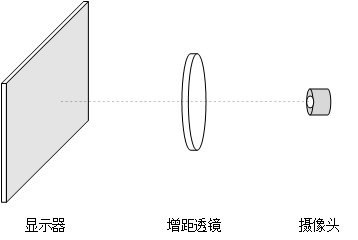
图3 视频暗箱工作原理示意图
视频注入,将仿真场景视频流直接通过HDMI协议传送到视频注入单元,该视频注入单元能将HDMI视频转码为符合GMSL协议的串行数据流,然后将串行的数据流注入到域控制器中。
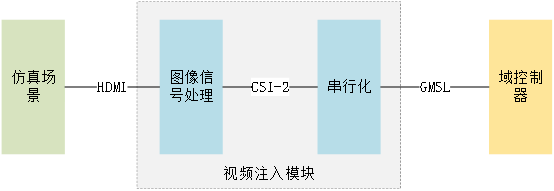
图4 视频注入仿真原理示意图
由上可以总结得出,不管哪种仿真方式,都离不开仿真场景,且场景中至少应该包含摄像头模型、车辆模型、目标模型。其中摄像头模型提供仿真画面的视角,也就是说传输给暗箱或者视频注入模块的画面是通过摄像头视角“看”到的;车辆模型是用来安放待测的摄像头的,摄像头的位置决定了它的功能;目标模型即为摄像头拍摄的目标,可以是其他车辆、行人、标志标线、路牌等等。
西门子的场景仿真软件Prescan的一大特点就是具备丰富的传感器模型,其中就包括2款摄像头传感器——普通单目摄像头和鱼眼摄像头。
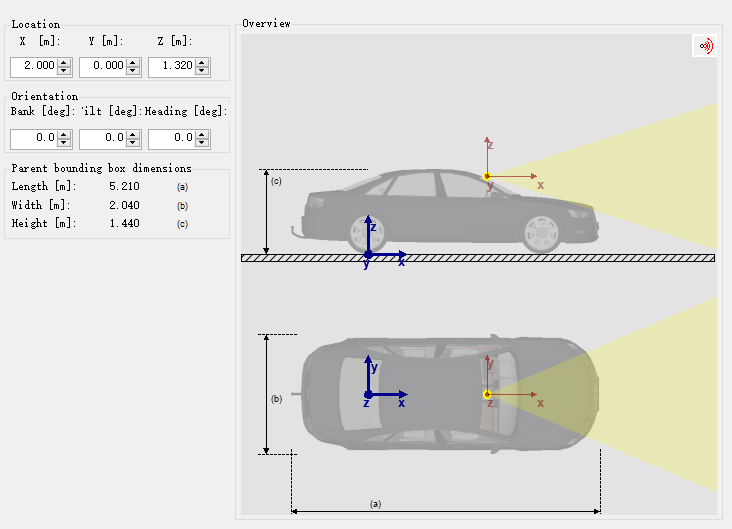
图5 摄像头模型安装位置设置
以普通单目摄像头模型为例,在Prescan中,可以设置摄像头的安装位置,包括XYZ位置和沿XYZ方向转动的情况,且可以直观地在预览界面中观察。
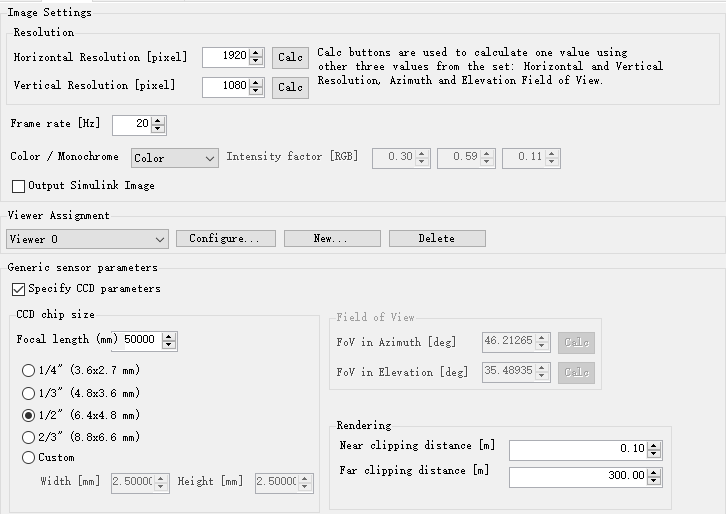
图6 摄像头传感器参数设置
还可以设置摄像头模型的分辨率、帧率、颜色模式、焦距、镜头尺寸、渲染范围。除此之外,Prescan的摄像头传感器还可以添加各种效果,比如模糊、HDR、等立体角、正交投影、平射投影、雨滴效果、脏污效果等。
有了摄像头模型,摄像头仿真验证的问题也就迎刃而解了:
根据实际的摄像头参数来配置摄像头模型的参数;
搭建场景,并输出摄像头视角的画面;
使用暗箱或者视频注入的方式将画面信息传递给域控制器;
域控制器根据获得的画面信息,确定是否激活相应的自动驾驶功能。
05结语
车载的摄像头传感器的探测范围和视场角都十分灵活,既可以远程探测,也可以辅助泊车;既可以定点识别,也可以全景影像化;既可以描述轮廓,又能够辨别色彩。用一种传感器覆盖了好几种其他传感器的功能,这也是某些主机厂敢于使用纯视觉感知方案的原因。摄像头有自己弱势的地方,但总的来说在自动驾驶领域是不可或缺的。
作为自动驾驶仿真测试的一部分,摄像头仿真的核心是摄像头传感器模型,优质的传感器模型能够通过一系列参数设置,最大程度地还原摄像头视角下的画面,让仿真测试的结果更有说服力。
审核编辑:汤梓红
-
摄像头及红外成像的基本工作原理2024-11-25 5666
-
DYNA4车载摄像头仿真#车辆动力学仿真北汇信息POLELINK 2024-01-04
-
摄像头工作原理2023-10-20 866
-
车载摄像头防水设计要点2023-07-21 3920
-
车载摄像头防水检测重要吗?-海瑞思2023-05-15 1957
-
车载摄像头安全为本 技术不断升级2022-04-21 3625
-
Camera摄像头工作原理是什么?2021-09-27 1649
-
基于硬件的车载摄像头车道偏离预警系统仿真测试方案2021-01-24 5483
-
车载摄像头的工作原理_车载摄像头怎么使用2020-12-02 17043
-
ISP和摄像头工作原理2019-09-17 11699
-
手机camera摄像头工作原理2011-11-30 242475
-
摄像头的工作原理 Product information2009-12-18 27219
-
什么是CCD,ccd摄像头工作原理2009-08-02 7248
全部0条评论

快来发表一下你的评论吧 !
