

毫米波雷达结构原理图详解
MEMS/传感技术
描述
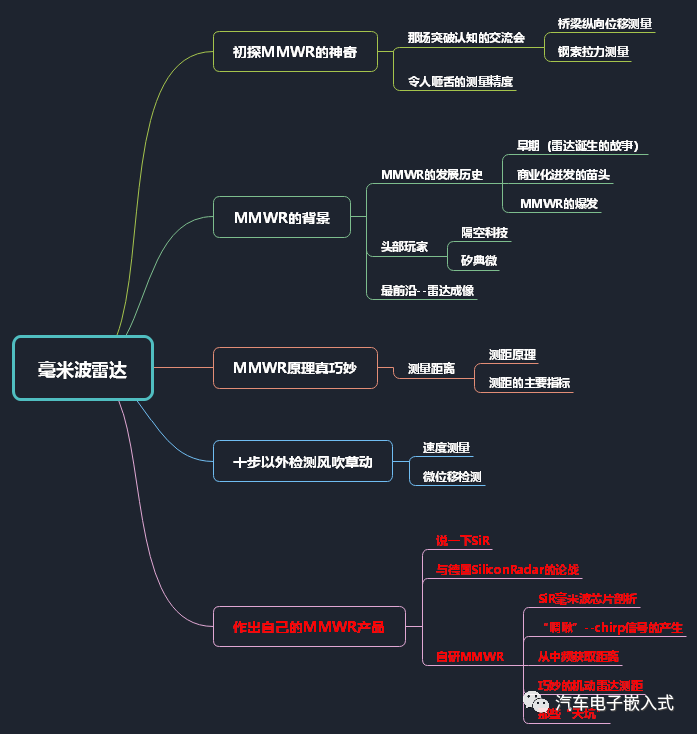
本系列文章为于振南老师的“工业之眼”--毫米波雷达(MMWR)部分,本文内容为: 作出自己的MMWR产品(研发记实)。
毫米波?也许你只在网上或新闻里有所耳闻,知道华为的5G基站使用了毫米波,或者知道特斯拉的自动驾驶有MMWR。其实前者是毫米波的通信应用,它使得通信带宽得到质的飞跃,为所谓的“大上行业务”应用提供了支撑(实时机器视觉就是最典型的“大上行”应用)。不过,本章并不讲毫米波的这种通信应用,而是侧重于后者,即在雷达方面的应用。
2021年前后,我的硬件团队一直在研发一个神奇的东西,就是太赫兹MMWR(THz MMWR)。应该说这项工作还是极具挑战的。我团队里有从英国名校留学回来的硬件工程师,精通高频模拟电路设计和无线系统仿真;另有工程师,包括我在内精通数字信号处理和嵌入式;这期间甚至还有位高权重的大佬(不便透露实名)参与关键部分的研发。即使这样,我们仍然感觉到了巨大的研发阻力。
太赫兹毫米雷达其实是MMWR的一个先进分支,或者说是新兴概念,它象征着最激进的MMWR技术。太赫兹MMWR的诸多优异特性使其成为了相关行业的聚焦点。
什么?MMWR到底是什么?它到底有多神奇?振南不再啰嗦,直接来看本章的内容。
正文
5、作出自己的MMWR产品(研发记实)
自从听了那次技术交流会之后,我们被MMWR的优异性能和巨大优势深深吸引了。在考虑了一段时间之后,我们决定将MMWR纳入到产品战略规划中去。随后我们就挑选精锐开始投入到MMWR的深入研究和产品设计研发之中。
其实一开始我们都是门外汉,完全没有接触过MMWR,甚至连基本的雷达相关知识都没有。振南在本章中所介绍的相关知识基本耗费了3个月的时间来学习和消化,很多资料都是晦涩难懂(所以大家应该珍惜这一章的内容,振南是尽最大努力把它通俗化,把消化好的知识直接喂给大家,好像有点恶心)。
我们先后调研了很多的芯片方案,比如TI、AD、Infineon等等,走了很多弯路。最后我们选用了德国SiliconRadar公司(简称SiR)的芯片,它只提供RFE芯片,即雷达模拟前端,而DSP、相关的电路(比如锁相环、信号调理等)都需要自己来提供和设计。选择它的主要原因是因为该公司强大的背景和先进的技术。
5.1 说一下SiR
很多人可能不知道SiR这个公司,其实它是一个超级牛的公司。
在全球范围内,毫米波雷达芯片核心厂商主要包括Infineon、NXP、TI、SiR等。2021年,全球第一梯队厂商主要有Infineon、NXP、TI和SiR,第一梯队占有大约70%的市场份额。其中SiR是专门作MMWR的,它的技术积累极为雄厚(因为专所以精)。它总部位于德国法兰克福,一直在为各种雷达市场领域开发标准化的芯片产品和针对客户的解决方案。它参与欧洲的很多智能交通相关研发项目,它的产品基本上代表了MMWR这方面的最先进水平。
千字不如一图,来看一下SiR的东西,如图18.39。
看到上图,是不是又明白了为什么频率越高越好(其实也不能这么说,主要是看适用场景)。频率越低,所需要的天线体积就越大,频率越高,天线就可以作得比较小,甚至直接集成到芯片里(主要是高频毫米波的波长更短),上图右边的芯片就是采用了AiP工艺(Ant in Package)把天线封装到了芯片之中。
“122GHz那个塑料罩是什么?”那个是透镜,也是一种波导,主要是用来收窄波束用的,这样测量距离就可以更远。(透镜的形状和材料都是有严格要求的,通常是抛物面,材料是PTFE,即聚四氟乙烯,这种材料对电磁波的衰减比较小)
5.2 与德国SiliconRadar的论战
我们了解到很多作MMWR的公司都有专门的团队来专门从事这方面的研发,而且有的团队规模还不小。像前面给我们作交流会的ZGZL,他们有10人的研发团队,而且40%是雷达专业的博士;SiliconRadar的研发团队实力就更加雄厚了,它们包括雷达系统、硬件设计、射频设计、测试等人数超过40人,其中有15-20是行业专家。再回过头来看看我们,我们只有3个人,还有一个是上位机软件工程师,其它两个是嵌入式和电路设计,而且起初完全没有MMWR的基础。但是产品一定是要作的,怎么办?这就是我这个研发总监要考虑的事情了。以下是我起初为MMWR研发而考虑的一些解决方案。
1、招毫米波相关的人才。针对于这个问题我向高层申请解释了很多次但是都没有得到批准。老板的话是:毫米波这个东西没那么难,硬件部现有的这些人难道搞不了吗?这就是典型的让驴拉磨又不给驴吃饱。一气之下:“不招了,我们自己搞!”
2、寻找技术支持来指导研发。本来我考虑可以通过渠道找到一些雷达方面的专家来进行请教,或者在研发关键点上给于指导,甚至是代调。公司背后是有高校资源的,但是我发现这些高校的老师完全是学院派,在实际工程方面并给不了什么有价值的建议。还得欠人情,说好话,流于虚套。
3、寻求SiR官方的技术支持。考虑SiR为了推广芯片,会向用户提供必要的技术支持。但是后来我发现,SiR根本不关心我们这样的小规模应用。它有限的技术支持还是留给头部大客户的。说白了,它根本不鸟你。他们推荐了一种可行的方案,即委托开发。
“你具体要作一个什么样的产品?”
“毫米波物位计。(其实就是测距仪)”
“具体指标需求?”
“50米测量范围,0.01mm的测量精度。”
“你这个需求还是比较高的,委托开发的话,我给你拟一个报价。”
后来SiR发来了委托开发报价,这也不是什么机密,报价单如图18.40。
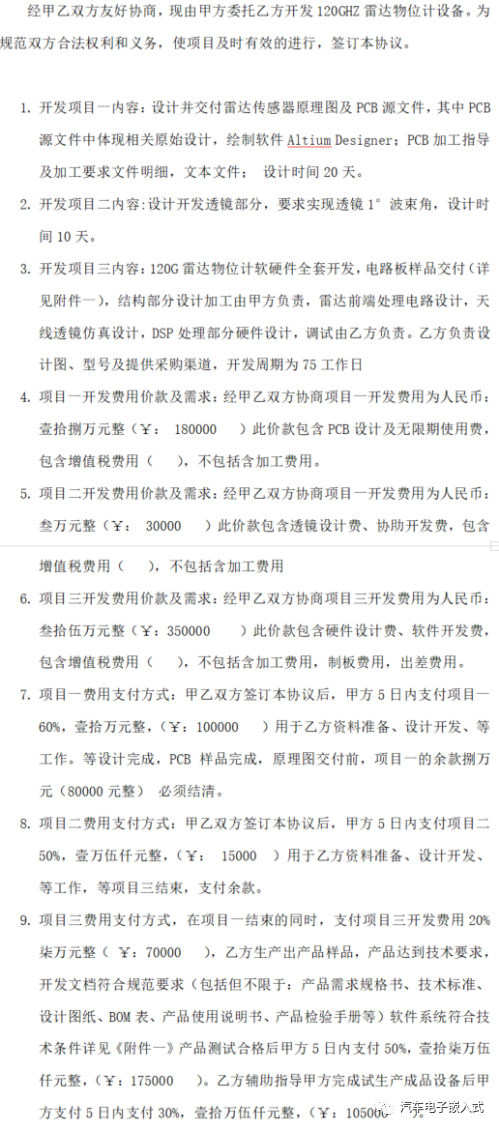
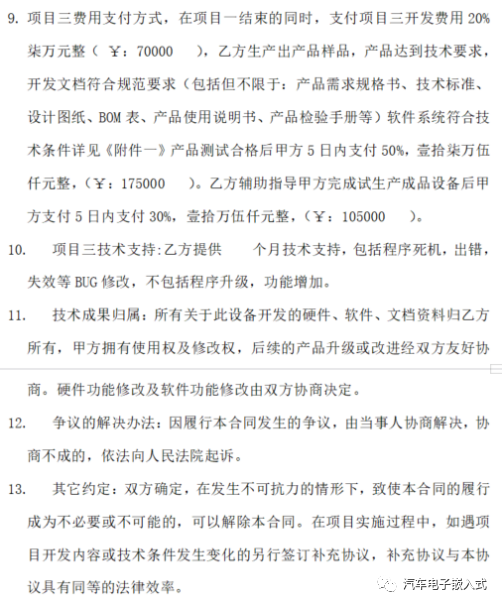
图18.40 毫米波物位计委托开发协议书
委托开发的价格已经近百万了,这肯定有敲竹杠的意思。下面就是论战的开始。
“你这价格也太高了,超出我们的预算!”
“这个研发投入还是很大的,不是那么简单的东西!”
“你们作的话,多长时间能看到东西?”
SiR的人小声讨论了一下,应该是在问研发的负责人。“半年,我们作的话最快也得半年!”
其实我们已经打消了委托开发的念头,这个价格就算砍掉一半老板也是不可能同意的。而且,说实话,这个委托开发可能还是个坑,如果花了钱最终还没有作好,或者被他们牵制后期小钱不断,我们就掉进无底洞了。到时候,老板可不会对你那么客气。
“别犹豫了,你们自己作不出来的!你们就没有作雷达这块的人,自己研究的话,没有意义!”这颇有点苏联专家撤退销毁原子弹资料的意思。
我还不敢把关系搞得太僵“这样,我们先作着看,如果有不能攻克的问题,我们再向您有偿请教。”
然后,就没有然后了。
5.3 自研MMWR(主力硬件研发工程师亲自讲述,曾留学英国)
后来,我们对毫米波物位计项目进行了内部立项,确定走完全自研的路线。我所带领的硬件团队也抽调了近半数人员参与了这个项目。包括电路设计、天线仿真、结构设计、嵌入式、上位机开发以及硬件测试。甚至把一些其它项目停掉来为这个项目让路。
以下是一些工程技术干货,有些是我们具体的一些研发成果。
5.3.1 SiR毫米波芯片剖析
自研120GHz毫米波射频前端这个工作估计可以培养好几位博士了,我们显然没有这样的实力和时间,经过了前期大量的调研工作,最后决定直接使用SiR的射频前端芯片,好处是可以直接跳过射频部分,把更多的精力放在应用上。
SiR芯片内置片上天线,可以自己产生119GHz至125GHz的毫米波信号,以完成发射、接收和混频的功能。此芯片直接输出中频信号,滤波后的中频信号的频率等于发射以及接收信号的频率差。下面我们拆开芯片,看一看它的内部究竟有什么样的结构。
图18.41 SiR毫米波芯片外观
我们当时使用的SiR芯片从外部可以直接看到天线,这款芯片的焊接可是难坏了我们的工程师。因为天线附着的白色基底无法承受高温,天线会直接翘起来。后来在损失了几个芯片之后才摸索出了快速有效的焊接方法。
图18.41中的天线一个用来发送毫米波,另一个用来接收。后来SiR又出了一款天线内置在硅片上的版本,无法直接观察到天线,应该会容易焊接一些。这两个芯片的辐射方向图有一些差异,天线可见的芯片发射角度要更小一些。
SiR芯片的内部主要是压控振荡器(VCO: Voltage-Controlled Oscillator),功率放大器(PA: Power Amplifier),混频器,低噪声放大器(LNA: Low Noise Amplifier)等。
VCO根据输入电压可以产生两路成倍数关系的振荡信号,比如,一路60GHz和一路120GHz。120GHz的信号经过缓冲器、放大器和天线被发射到了空间中;反射回来的信号则被天线接收,通过LNA放大之后,与此时正在发射的信号进行混频;另一路60GHz信号,经过32分频后输出至外部,用于形成频率控制环。频率控制环需要外部的分频和鉴频电路参与,共同形成PLL回路。如图18.42所示。
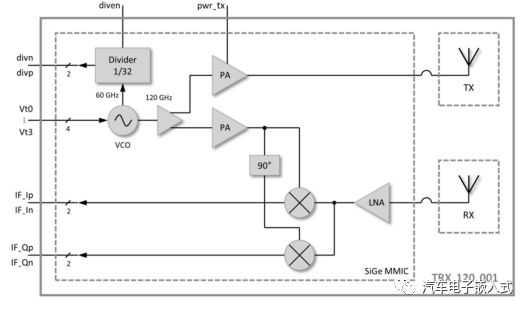
图18.42 SiR毫米波芯片内部结构
SiR毫米波芯片的输出信号,则是一对IQ信号。距离测量的场景下,只需要解析其中一路的频率和相位即可。一般输出的信号需要经过阻抗变换,滤波和放大之后才能被ADC采集。
至此,可以绘制出毫米波物位计大概的整体结构了。如图18.43所示。需要说明的是我们研发的毫米波物位计一般用来测量移动速度较慢的物体,否则多普勒效应就需要增加额外的信号处理了。
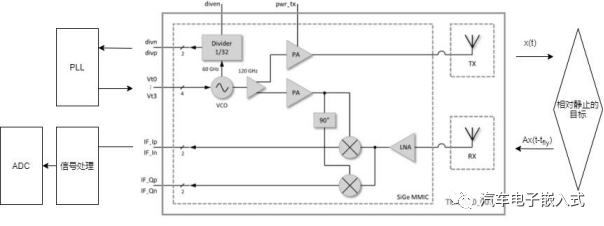
图18.43 毫米波物位计总体结构
5.3.2 “啁啾”--chirp信号的产生
射频信号的收发,少不了类似于分频器、PLL、鉴频鉴相器等部件对信号进行调制。一方面要维持频率的稳定性,否则信号就会“跑调”;另外还需要对载波的频率或者相位进行调制,这样才能传递信息。
那么PLL是如何实现频率的稳定呢?请看图18.44,一个典型的PLL环路由VCO,分频器,鉴频鉴相器以及参考频率信号构成。参考频率信号一般是稳定性较高的固定频率时钟源,比如晶体振荡器。鉴频鉴相器类似于一种差分放大器,当其输入的两个频率有差异时,它会输出一个和差异信号成比例的电压。VCO则是执行器,负责把电压转换为目标频率。然而有时目标频率会非常高,或者不容易找到匹配的晶振作为参考频率信号,这时候就需要分频器把VCO的输出进行降频。
这个环路可以很好地解决VCO的各种漂移问题,并且能使用一个比较容易实现的低频电路,搭配一个高频的VCO实现稳定的高频信号。
那么如何对信号进行调制呢?参考频率信号肯定是不能动的,鉴频鉴相器的“增益”也不容易随意改变,那么只能改变分频器的分频倍数,也只有分频器可以做成纯数字电路。
问题就出在分频器这里。一般分频就是直接2分频,4分频,8分频等等,分频系数为2的指数倍。如果只产生一个固定的频率输出,可能整数分频还好使,但是如果想要产生一个连续调频波,难度就会很大。因为一般调制带宽相对于载波频率会小得多。如果一会使用2分频,发射了2GHz的信号,一会又改成了4分频发射1GHz的信号,那岂不是浪费了大量带宽?
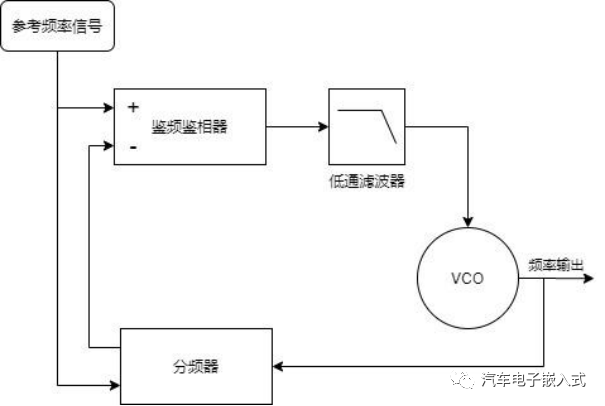
图18.44 一个典型的PLL环路
那么如何产生2GHz和2.1GHz呢?
相信很多人应该听说过微积分,也一定听老师说过数学不仅仅是如何计算而是学会数学的思想。使用数学的思想去解决问题。那么分频器里面也是利用了微积分的思想。
分频器内部有一个控制器,会以参考频率信号作为工作时钟,根据用户对寄存器的设置,控制整数分频的分频数,比如可以控制第一秒进行N分频,第二秒进行N+1分频。灵活控制两个不同分频数的占比,可以在使鉴频鉴相器输出类似于PWM波的信号,经过低通滤波器处理形成电压信号,最终控制VCO。
有些锁相环芯片具有内部控制器,可以根据用户的设置自动控制分频器的分频比,实现控制VCO输出调制信号的目的。小数N分频里的控制器是核心部件之一,直接关系到VCO输出频率的稳定性和噪声水平。
我们团队使用了ADF4159构成锁相环。该芯片内部集成了斜坡发生器,可以控制VCO产生连续调频波,连续调频波的频域图形就是锯齿形,或者三角波。ADF4159还附带有一系列的控制信号,来触发chirp信号和指示信号的结束。利用这些控制信号,可以和ADC联动进行采样等操作。关于这个芯片的具体信息,可以去参考芯片的手册,有时候仔细研究手册也可以学到很多的知识。
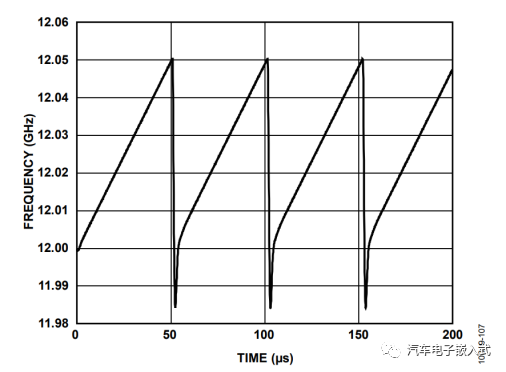
图18.45 一个典型的锯齿斜坡
图18.45为ADF4159手册里的一个典型锯齿斜坡,横坐标是时间,纵坐标为频率。锯齿斜坡代表一个个持续时间为50us的连续调频波,调频波的频率从12GHz至12.05GHz。这个锯齿斜坡可以由ADF4159自动循环产生。通过设置每一个循环的步长以及每一步之间的时间间隔,可以实现改变斜坡的时长(即斜率)。
学习了ADF4159之后,便可以灵活地控制chirp信号的带宽和长度了。那么到底该多长呢?我们在做设计的时候使用了SiR芯片的全部带宽,以获取足够多的采样点数。但是斜坡的斜率到底应该是多少呢?
通过前面的章节可以知道,如果目标距离越远,回波和发射波之间的频率差就越大,那么如果ADC的采样频率有限,就无法正常测量远距离的物体。这个时候就需要改变斜坡的斜率,控制发射波的频率增速。反之,如果目标距离太近,频率差太小的时候可能信噪比会不够理想,无法正常解析有用信号。
5.3.3 从中频获取距离
SiR芯片输出的中频信号,需要经过阻抗变换、滤波和放大才能被ADC采集。也可以把阻抗变换和低通滤波器集成在一起。
中频信号的带宽可以达到几百兆赫兹,而对于我们当时的项目来说实际可以使用的只有前面的几兆赫兹,这时候就需要低通滤波器把高频信号滤掉。同时,低通滤波器的截止频率还应该兼顾ADC的采样频率或者ADC的架构。Σ-△架构的ADC自带过采样属性,有一定的抗混叠能力。不过还是建议把滤波器截止频率设计为符合奈奎斯特采样定理。工程上,采样频率一般为截止频率的3至4倍。
一般低通滤波器设计为单位增益,不过为了提高集成度减轻后级放大压力,也可以根据选用的运放适当设计几倍的增益。关于先放大还是先滤波,会有一些争议,在本项目的应用中,中频信号并不是一个非常小的信号,另外中频信号中可用的频带确实比较窄,所以最后选择了使用两倍增益的低通滤波器。
低通滤波器有很多种可以选择,但是需要知道中频信号的哪个参数对我们是最重要的。幅值信号只需要在ADC的动态范围内即可。最终的还是频率和相位信号。滤波器对不同频率的信号具有不同的移相特性,需要明确所设计滤波器的相移特性或者直接设计在通带内相移特性平坦的滤波器。
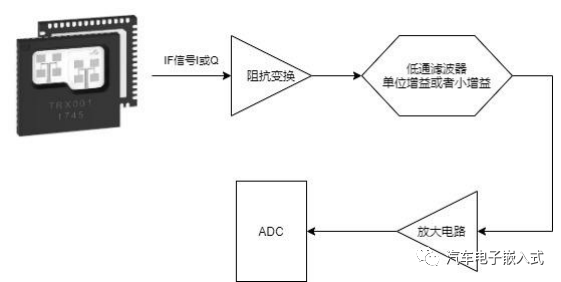
图18.46 一个典型的信号调理电路
选择ADC的时候需要综合考虑很多因素。首先是具体的研发指标,相同的信号,采样频率越高,在做FFT时频率分辨率就越高,同时造价也就越贵。高速率的采样不仅会导致ADC价格增高,数据处理和传输的复杂度都会增高。
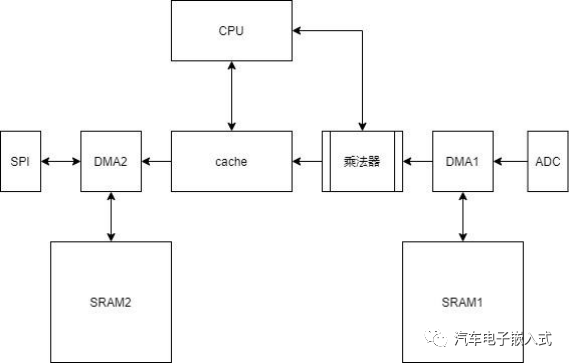
图18.47 处理器内部各模块结构
我们团队选用FFT作为核心算法,来获得中频信号的频率和相位信息。ARM官方有FFT库可以直接调用,如果选用的处理器带有浮点乘法加速器(FPU),可以很快速地完成FFT的计算。我们当时使用的库最多只支持到4096点,后期做算法需要插值运算,最多要处理8192点,后来又基于原库的算法,进行了升级。有些处理器带有cache和SRAM组成的多级缓存,FFT的数据可以分级存放,把需要频繁存取的数据放入cache中。而有些处理器cache比较少,需要一定的策略去完成数据的调用。
我们当时充分使用了DMA控制器实现并行处理。首先使用DMA将ADC的原始数据搬入SRAM,同时内核在进行FFT运算。一次采样结束之后,FFT也基本上已经完成了处理,然后对ADC数据进行转换防止做FFT时溢出,转换的结果直接存入cache,然后开始后续的FFT运算,同时开始采样。
整个负责数据处理的部分没有使用操作系统,而是充分发挥处理器的DMA和硬件总线的性能。另外硬件上还设计了一个处理器专门用于处理数据发送,云端指令等业务逻辑。它们之间通过共享RAM的方式实现数据和指令交互。
5.3.4 巧妙的机动雷达测距
上文中提到使用FFT对中频信号的频率和相位进行解算,获得中频信号的频率之后就可以知道频率差,以此推算时间差,获得飞行时间之后就可以知道距离。
但是FFT,或者说我们的这套处理系统有一个致命缺陷。FFT是离散傅里叶变换,但是我们的宏观世界,距离变化是连续的。所以这一套系统必然会因为FFT的频率分辨率而存在一个距离分辨率。
同时,如果距离变化在一个波长以内,中频信号只会表现为相位的变化。
为了解决这个问题,有很多思路。我们当时提出了一个非常大胆而又有效的思路,使用内置机械结构(电机)在一个确定范围内移动测距仪,使FFT的频点跳动一格,同时解算和记录相位。当频点发生跳动时,意味着我们跨越了一格;只需要记录起始的机械位移就可以把频点及相位与真实的距离对应上。类似于进行一次对焦,焦点处的图像最清晰,而且可以根据镜头的参数获得焦点的准确距离,之后可以推算出被测物理距离焦点的位置,实现精确测距。
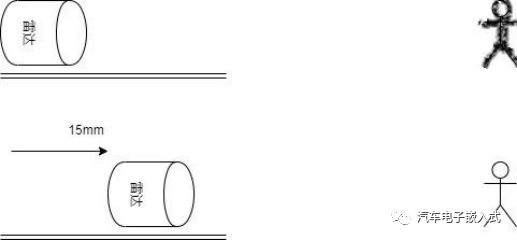
图18.48 使用机械“对焦”的毫米波雷达
如图18.48,雷达在导轨的初始位置,只能“看到”一个模糊的粗影。这时这个粗影可能在FFT刻度的左边,也可能在右边(未聚焦)。这时候雷达在电动的作用下往右侧开始移动,假设移动了15mm,粗影突然在FFT的某一个刻度上出现,这个时候我们终于看清楚了,模糊的粗影变成了一个清晰的人影。因为雷达对于外壳测距基准点的位置是已知的,这时候人影的位置也可以直接计算出来。值得一提的是,传统透镜的焦点也许只有一个,而毫米波雷达“焦点”实际上是FFT频谱上的每一个刻度。所以,雷达只需要向一个方向运动即可。(这种方法,我们称之为机动毫米波雷达)
另外还有一些人在研究FFT的频率估计算法,以求获得高于FFT频率分辨率的测量精度。但是这些算法大部分计算比较复杂,难以实现快速计算。另外受制于项目周期,还有一些优秀的算法我们没有来得及进行测试。
另外通过完整利用IQ信号是否可以获得更多的信息,我们也没有再去深入研究。
5.3.5 那些“天坑”
搞射频离不开天线。官方给的DEMO使用了一个透镜天线。我们后来为了设计辐射窗口,分别测试了高密度聚乙烯(HDPE)、聚四氟乙烯(PTFE)、尼龙、聚醚醚酮和玻璃纤维等很多材料的透射率。这些材料的可见光透射率比较低,但是对于120GHz的毫米波来说,有些材料透射率非常高,比如聚四氟乙烯板基本上不会产生明显损耗,而且它的密封性能和加工性能都很优秀。
透镜天线则是一种类似于凸透镜的天线,毫米波在材料中会发生折射,根据折射率不同可以制成不同的透镜天线。透镜天线具有很好的方向性,对于其它方向入射的杂波也具有很好的抑制作用,而且制造精度要求不高,易于批量。
但是我们当时苦于没有找到很好的透镜天线设计人员,转而设计了抛物面天线(如卡萨格伦天线,如图18.49所示)。后来为了提高电路的集成度,改成了偏心抛物面天线,如图18.30。整体使用铝合金制作,反射面上打磨光滑,电路板安装在偏心位置。调试的时候在目标位置放一个明亮的光源,可以很明显地看到光线经过反射之后汇聚到了毫米波芯片的内置天线位置上。
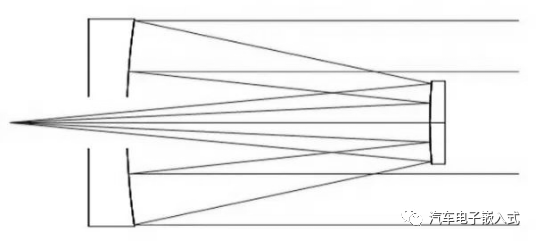
图18.48 毫米波雷达抛物面+双曲面天线(卡萨格伦天线)与原理
中频信号处理也是一个大坑。尤其对于这个应用来说,中频信号并不是连续的,而且还会受到各种环境干扰。搞毫米波一定要在专业的环境中,否则各种空间噪声还有看不见的电磁波会让人觉得在一个充满量子幽灵的玄学世界。另外,调模电一定要有专业的仪器和专业的模拟电路工程师,如果连运放最基本的参数都看不懂,那还是先把基础知识学好吧。否则,肯定会觉得这个世界上没有几家靠谱的芯片公司,会觉得ADI的芯片都有问题。此时ADI的FAE肯定想说:“是你的脑子有问题。”
总而言之,可以很大胆地去规划一个产品,但是在研发过程中一定要对技术保持敬畏。
谢谢我的海归宝贝工程师(马崇琦)的亲自讲解。可能有些内容说得有点专业。正所谓高处不胜寒,水平越高,说话越接近天书。
“马工,介绍给你一个电影《天书奇谭》,看一下!”
“南哥,别开玩笑了。这个讲通俗不容易的。”
说了这么多,来看看我们最终的产品吧,如图18.49-50所示。
通过本文的描写,毫米波雷达是否刷新了你的认知?希望您能有所收获。OK,这一章就写到这里。
编辑:黄飞
-
简述毫米波雷达的结构、原理和特点2024-08-16 6658
-
了解毫米波 -- 之一2023-05-05 1591
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2358
-
关于电磁波与毫米波雷达之间的影响2022-04-23 39302
-
漫谈车载毫米波雷达历史2022-03-09 12119
-
毫米波雷达(RADAR)2022-01-25 4184
-
毫米波雷达的特点是什么2021-07-30 7411
-
毫米波雷达(一)2019-12-16 15047
-
浅析车载毫米波雷达2019-09-19 6987
-
车载毫米波雷达的原理是什么?2019-08-07 7685
-
车载毫米波雷达的技术原理与发展2019-05-10 6245
-
求推荐毫米波雷达2018-12-25 4930
-
毫米波雷达方案对比2018-08-04 12509
-
毫米波雷达的应用场景_毫米波雷达技术及应用大解析2018-04-24 48469
全部0条评论

快来发表一下你的评论吧 !
