

激光雷达导航机器人
描述
激光雷达导航是通过360度旋转雷达对周围10米以内平面空间进行扫描,并生成平面地图;根据雷达扫描出来的平面地图结合碰撞、沿墙等不同的传感器取得的数据来进行自主定位、导航、路径规划等SLAM算法。
特性
1)地图信息准确度高,定位范围广,定位快速且精度高.
2)地图可以在手机,平板等远程设备端准确实时显示.
3)具有可视化地图操控功能,可实时查看机器的运动轨迹,并进行地图虚拟墙等操作.
4)具有机器当前位置重定位功能,重复定位精度<0.5%,绝对定位精度<2%.
5)适应性强,适用于于各类地板,瓷砖类地面,都可以正常完成预定的运动.
6)兼备陀螺仪地图构建导航方案的全部特性.
7)基站回座一体化设计,基站与主机信息相互传输。
应用领域
室内机器人,比如清洁机器人,
运货机器人(AGV),服务机器人
无人机,比如巡逻,搜索,监视等无人机
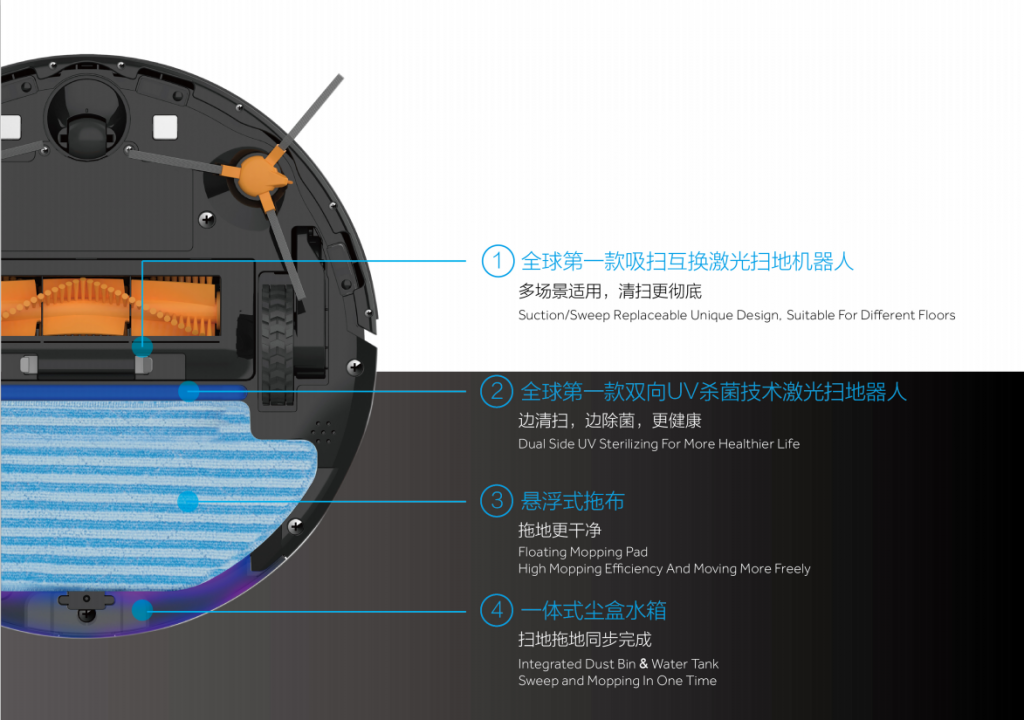
 激光导航扫地机
激光导航扫地机

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达的角度问题2016-04-16 4904
-
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV2017-06-10 8365
-
激光雷达分类以及应用2017-09-19 8923
-
常见激光雷达种类2017-09-25 14027
-
消费级激光雷达的起航2017-12-07 7512
-
机器人产品传感器越多,就越能有效避障?2018-08-27 3328
-
让机器人在陌生环境里穿梭自如的激光雷达2018-09-10 3956
-
服务机器人是如何实现自主定位导航的?2018-10-10 3317
-
AGV激光雷达SLAM定位导航技术2018-11-09 10100
-
除了机器人行业,激光雷达还能应用于哪些领域?2018-12-10 4925
-
机器人和激光雷达都不可或缺2019-02-15 6239
-
TOF激光雷达2019-06-07 9316
-
用于机器人避障的激光雷达避障传感器安装方式详解2020-05-12 7217
-
当“思岚”激光雷达邂逅盲人拐杖2021-11-12 4121
-
随着第三代AGV导航技术兴起 激光雷达传感器成了移动机器人的利器2019-04-28 3551
全部0条评论

快来发表一下你的评论吧 !
