

Medini Analyze — 智能驾驶功能安全平台工具
描述
“安全”被普遍认为是智能驾驶汽车被用户接受或者得到商业应用的显著问题,传统汽车电子按照功能安全(ISO 26262,避免系统性故障及随机硬件失效)标准进行安全设计,而智能驾驶汽车安全要求超越了功能安全范畴,尤其是L4及以上智能驾驶车辆中驾驶员将不再接管对车辆的控制权,功能安全要求演化为失效可工作(Fail-operational),产品设计需要兼顾预期功能安全(ISO/PAS 21448,解决产品性能受限及驾乘人员误操作)、信息安全(ISO/SAE 21434,防御网络攻击)等多重安全需求。
如何进行安全分析才能确保安全需求完整而充分?如何验证系统/ 软件/ 硬件设计方案的安全性?如何有效融合功能安全、预期功能安全及信息安全要求以创建高安全智能驾驶体系?如何保证开发过程的追溯性、一致性、完整性?
2020年3月,Medini Analyze推出了针对预期功能安全(SOTIF)、信息安全(Cybersecurity)领域的解决方案,成为一款具备功能安全、预期功能安全(SOTIF)、信息安全(Cybersecurity)三大领域开发的专业安全开发平台。
功能安全
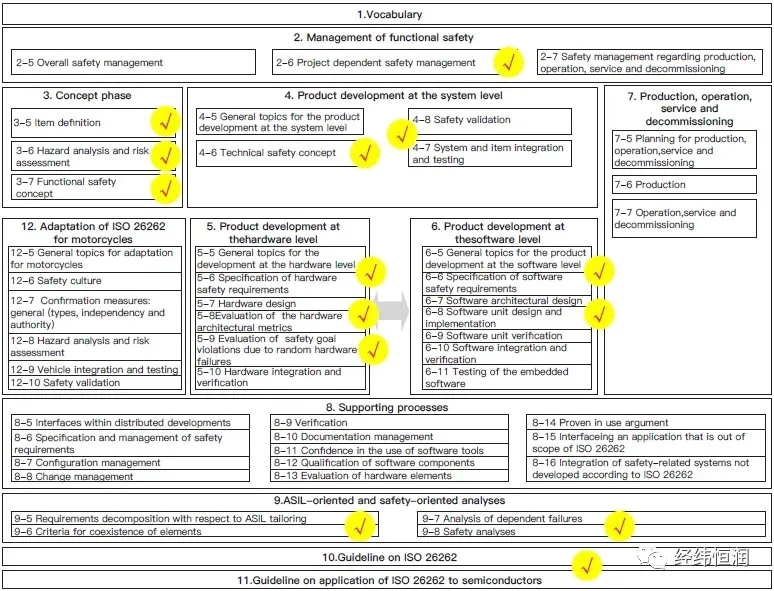
Medini Analyze工具是专业的功能安全开发平台工具,符合ISO 26262开发全流程,功能覆盖ISO 26262要求的所有开发活动,它的主要功能如下:
???? 项目定义
- 支持功能定义、行为设计、初始架构建模
- 提供HAZOP模板用于失效识别等
???? 危害分析和风险评估
- 提供驾驶场景数据库以支持HARA 情景分析
???? 安全需求开发
- 支持基于安全分析(如FTA)的安全需求导出,确保安全需求不被遗漏
- 支持创建UML需求树,满足可视化的需求追溯关系建立和维护
- 支持和DOORS、DNG、PTC等主流需求管理工具进行交互
???? 安全架构设计
- 支持标准SysML语言的架构设计,支持向架构分配需求,实现需求和设计的追溯性
- 支持导入Simulink、SCADE、EA、Raphsody等主流建模软件的输出模型文件
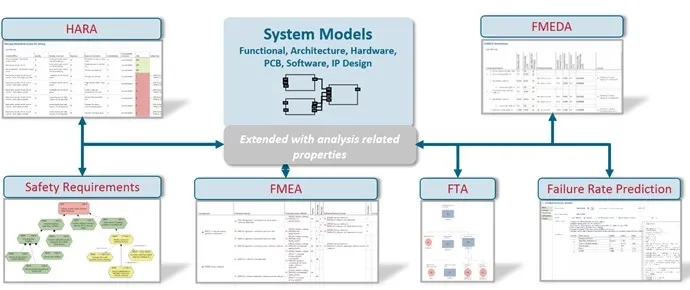
???? FMEA
- 支持基于 SysML 的设计模型生成FMEA表格,确保FMEA 和其分析对象(架构)直接的关联性、完整性,也便于架构优化时更新FMEA
- 支持VDA-AIAG标准的FMEA,集成ISOS26262 part5 appendix D所有安全机制
???? FTA
- 支持基于SysML的设计模型创建 FTA,确保 FTA 和其分析对象(架构)直接的关联
- 支持最小割集分析以及PMHF计算
???? 硬件指标计算FMEDA
- 提供SN29500、IEC62380 以及ISO 26262:2018新推荐的IEC 61709等5个失效率计算手册
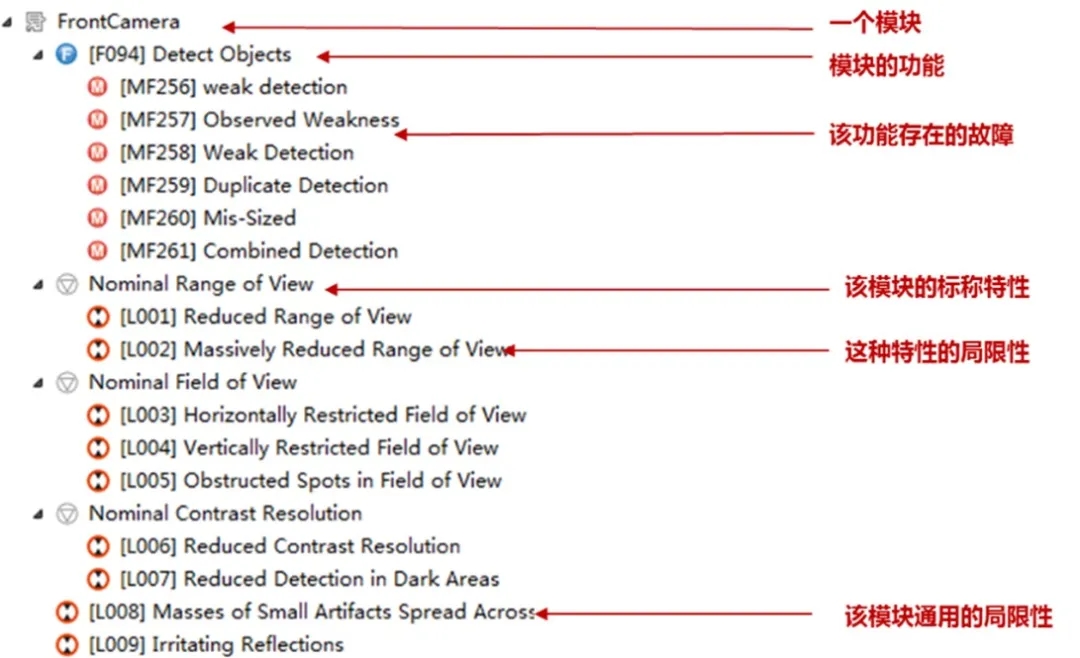
预期功能安全SOTIF
???? 基于SysML的系统架构搭建
???? 基于引导词的limitation识别
???? 触发条件识别与定义
???? 支持STPA分析
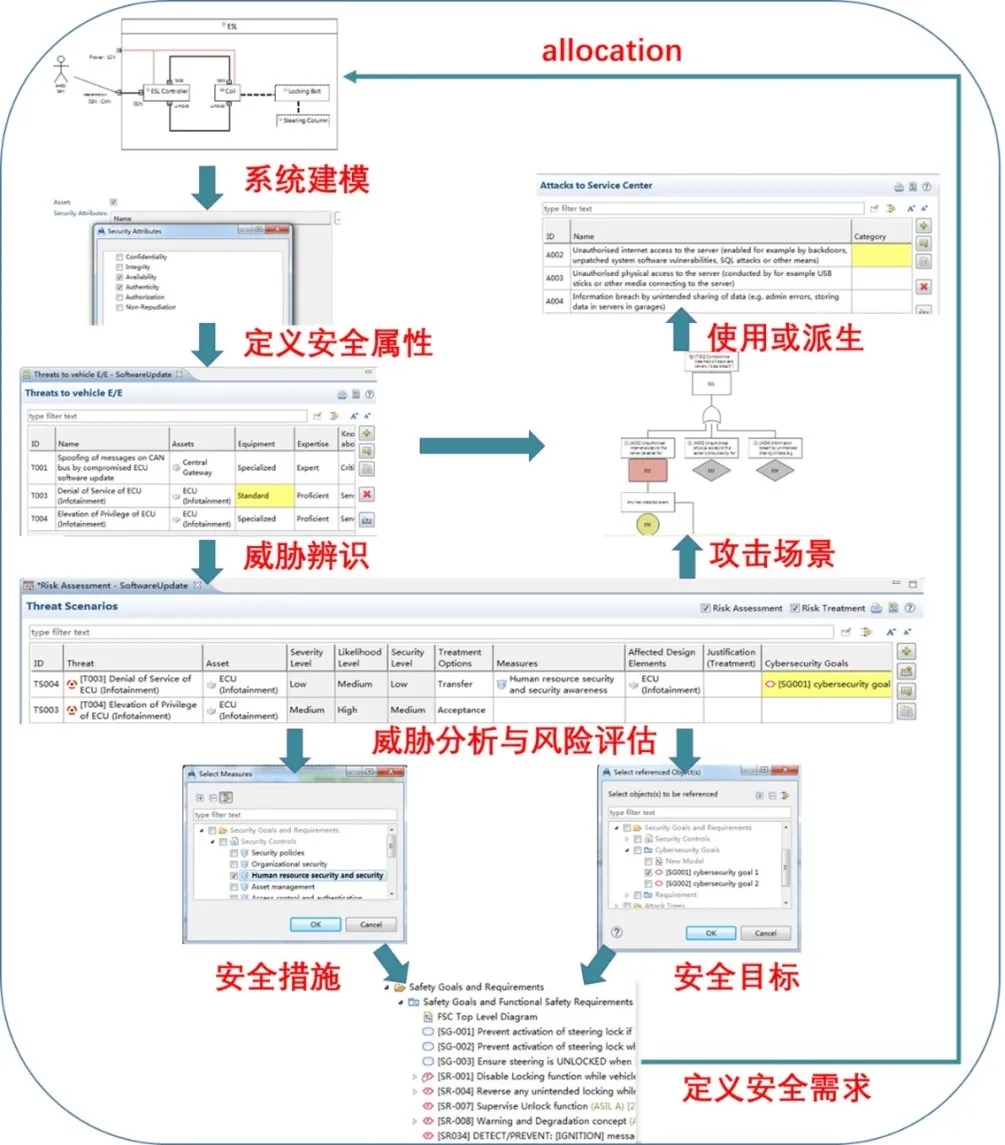
信息安全Cybersecurity
Medini Analyze支持基于模型的系统化信息安全威胁识别和分析,并提供信息安全分析模板。
???? 基于SysML进行上下文定义
- 架构建模
- 资产识别
???? 威胁识别
???? 攻击树分析
???? TARA分析
???? 安全目标与安全需求管理
-
无人驾驶导航平台2014-11-11 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
智能感知方案怎么帮助实现安全的自动驾驶?2019-07-31 0
-
驾驶辅助技术的一些常见功能介绍2020-08-14 0
-
智能驾驶和物联网产品及解决方案2020-10-23 0
-
功能安全与SO***融合实施设计方案2020-12-10 0
-
智能驾驶开发及测试评估平台分析2020-12-16 0
-
medini analyze工具的功能和应用2020-12-29 0
-
符合ISO 26262的功能安全平台工具2020-12-29 0
-
智能驾驶全量数据感知及分析系统2020-12-31 0
-
智能驾驶测评工具组的用途2021-02-03 0
-
针对智能驾驶功能的开发和测试平台软件ViCANdo介绍2021-04-15 2676
-
Medini Analyze — 智能驾驶功能安全平台工具2021-12-02 4537
-
【直播内容抢先看】智能驾驶功能安全综合方案2022-06-16 481
-
黑芝麻智能代码生成工具喜获DEKRA德凯ASIL D功能安全产品认证2024-05-29 435
全部0条评论

快来发表一下你的评论吧 !
