

AN-2021.04重要装备姿态控制为什么要用PID闭环测量
描述
本篇尝试用通俗易懂的语言,来表述闭环物理参数测量的重要性。从原理上解释为什么重要装备要慎用以正向开环测量为基础的传感器。 由于笔者非专业出身,有些提法或观点不一定正确,还望大伽您海涵并纠正!
第 一
这里讲的重要装备指如下几类:
1.石油随钻测井(MWD)或随钻录井(LWD)
2.航姿系统/飞控系统
3.某些类型的导弹
4.其它高精度长寿命的装备
这些应用大致有几个共同点:
1.需要使用特定的传感器精确地测量载体所感受的一些物理量的变化情况。比如用加速度计来测量重力场/直线速度/距离;用陀螺仪来测量角加速度/角位移;用弱磁测量单元来测相对于地磁北的夹角等。只有把这些参数测准,才有望把载体的运动轨迹控制好。
2.工作期长,或储存期长,且不能定期标定。
3.若任务失败,可能造成较大的经费损失或灾难性后果。
第 二
物理量测量主要参数的表达形式:
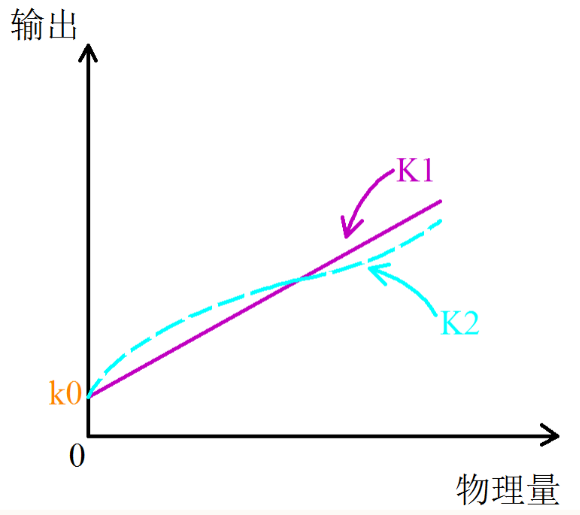
1.输出零位(Ko),即无物理量输入时,传感器输出偏移零位的值。
2.比例因子(K1),即被测物理量变化引起的传感器输出变化的比例。
3.二阶非线性系数(K2),即测量输出偏移比例因子K1的大小。
4.输出零位的温漂(dko/dT)和时漂(dko/dt)。
5.比例因子的温漂(dk1/dT)和时漂(dk1/dt)。
第 三
传感器的实现方式:
借助于对某种物理量敏感的材料或结构,加上电子调理电路,用电压(V)或电流(I)的变化来间接表达当前物理量的变化情况。
以线加速度为例,其结构中含有一个惯性质量块和一个差动电容器。外施加速度会使这个质量块位移,从而差动电容的容值就会发生变化。将这个变化交由电子调整电路处理,便可得到一个随外施加速度大小而变化的电压/电流输出。如下图所示:
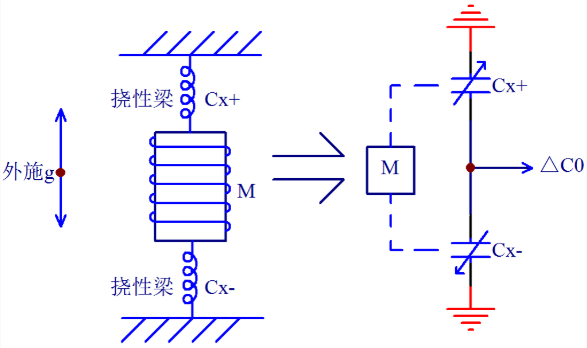
注:开环测量传感器内部质量块没有力矩器线圈

硅微机械加速度计(MEMS),石英挠性加速度计,悬丝摆式加速度计均是基于上述原理实现的。
这种结构均有一个平衡点,或者叫“机械零位”。即在没有外施加速度时,惯性质量块在中间位置,ΔC0=0。
理论上,或者工程实践上都会得出这样一个结论,即在可预见的测量范围和测量带宽内,这个惯性质量块偏离“机械零位”越小,则ko的时漂(dko/dt)和k1的时漂(dk1/dt)越小,K2也越小。进而测量的精度和稳定性越高。
第 四
传感器参数变化如何影响系统?系统应用时又是如何应对的?
1.Ko、K1的大小及温漂会导致测量的基础值或比例发生变化。但只要在一定范围内,且随温度呈现单调漂移,且无“热迟滞”,则均可通过DSP/ISP建模修正掉。但其时漂无法建模修正,只能在使用前或不定期的标度才能完成。这在许多重要装备上要么很难完成,要么根本无法实现。
2.K2则不然。在正向开环测量传感器中,它会随物理量的大小而变化。一是很难修正准确,二是拟合次数多了,很容易引发CPU中断打架。
3.“热迟滞”的表现特征如下图所示:
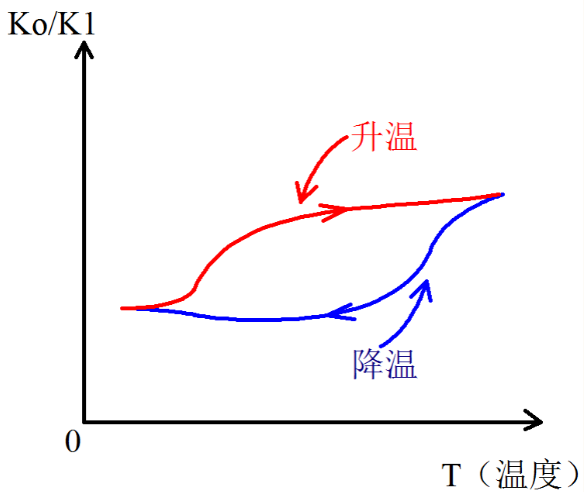
就是Ko/k1在升温过程中和降温过程中漂移不走同一条路,不重合。致使在某个温度点DSP不知道是按上限补偿、还是按下限补偿。
总之,对于DSP很难完成或无法完成的传感器参数建模修正的情况,均会影响装备的测控精度。
第 五
PID闭环测量:
P指当前偏差量的大小,I是指偏差的历史积累,D是指偏差未来的变化趋势。
PID测控是目前已知的最优控制方法。按照其实现方式又分为模拟PID和数字PID。
具体到线加速度计应用上,就是通过对差分电容变化情况的检测、得到惯性质量块相对于机械零位的变化情况。将该偏差量交由PID控制回路运算,结合固定在惯性质量块上的力矩器,产生一个负反馈力矩,将惯性质量块拉回到机械零位。用反馈力矩的大小来表征当前感知的加速度大小,具体原理框图如下:
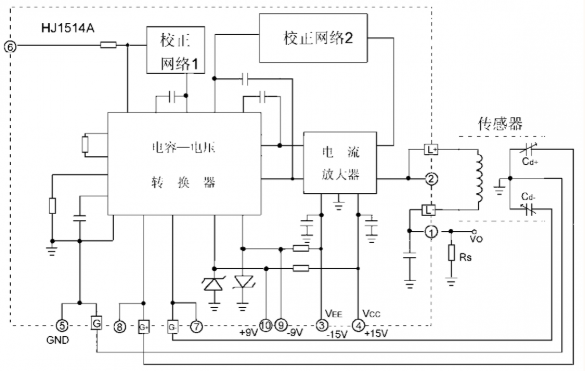
由于该方法对惯性质量块移动的历史,现在,将来都考虑进去了,只要整定好PID参数,在设定的测量范围和测量带宽内,测量精度会很高。二阶非线性(k2)也小下来了。其实这点很容易理解:就是惯性质量块位移越大,则差分电容的非线性越大。反之亦然。
由于有负反馈力矩的存在,不光保证了在测量范围内的测量精度,也能提高加速度计在感受到异常大的加速度时的耐受力,有利于提高其抗冲击/振动的能力。因为这时惯性质量块虽然已脱离了机械零位,但仍然能形成一定的阻尼,减小了质量块碰/蹭上/下限位的力道。当然也能减小振动整流误差。
第 六
石英挠性加速度计,悬丝加速度计,挠性陀螺仪,磁通门均采用模拟PID闭环测量。优点是精度高、时漂小、温漂小、二次非线性小。缺点是能耗大、体积大。
硅微机械(MEMS)实现的陀螺仪、加速度计、弱磁测量单元现时的主流是正向开环测量。优点是可利用业已成熟的芯片加工工艺大批量生产,成本低廉,并且能在许多工业场合或汽车家用设备上大量应用。缺点是时漂大,二次非线性大,测量精度不高。需要不定期标定。
第 七
建议设计师在应用于重要装备上的传感器选型上注意如下几点:
1.从产品原理介绍上区分是不是闭环PID测量。
2.产品手册中没有给出时漂,二次非线性,热迟滞参数的要慎用。
3.没有系统地处理材料应力、加工应力、电老炼的产品要慎用。
4.合理折中测量精度与能耗、无效载荷之间的辩证关系,且勿小马/病马拉大车。
5.不能盲目相信计算机能补偿一切误差源。
- 相关推荐
- 热点推荐
- 伺服电路
-
基于PID的电机闭环控制浅析2016-01-28 11612
-
四轴无人机的结构与基本飞行原理和双闭环PID控制解读2018-07-14 7564
-
实现电机的速度闭环控制2021-08-04 1809
-
请问PID闭环如何控制电机转速?2021-10-18 3065
-
PLC的PID控制怎么实现闭环控制呢?2023-03-30 4902
-
改进PID的无人机飞行姿态角控制消颤算法_陆兴华2017-03-19 1077
-
一文阐述PID控制算法精华2018-02-06 4026
-
关于变频器PID控制的相关概述2018-07-05 24075
-
详细分析PID控制算法原理和调试口诀2018-08-13 22865
-
PID基本概述和参数调整口诀2018-08-29 18830
-
PID参数调整口诀2018-11-20 23723
-
分享精心整理的PID基本概述和参数调整口诀2019-06-04 11889
-
电机PID控制和闭环控制2023-05-06 1076
-
PID回路控制及闭环控制原理2023-05-17 9567
-
PID原理和调试口诀2022-05-13 2623
全部0条评论

快来发表一下你的评论吧 !
