

功率放大器在音圈电机直驱水液压阀的动态特性试验研究中的应用
描述
实验名称:
功率放大器在音圈电机直驱水液压阀的动态特性试验研究中的应用
实验目的:
通过NI的多功能IO设备搭建基于LabVIEW的直驱阀闭环控制系统,试验研究直驱阀的动态特性和稳态特性。
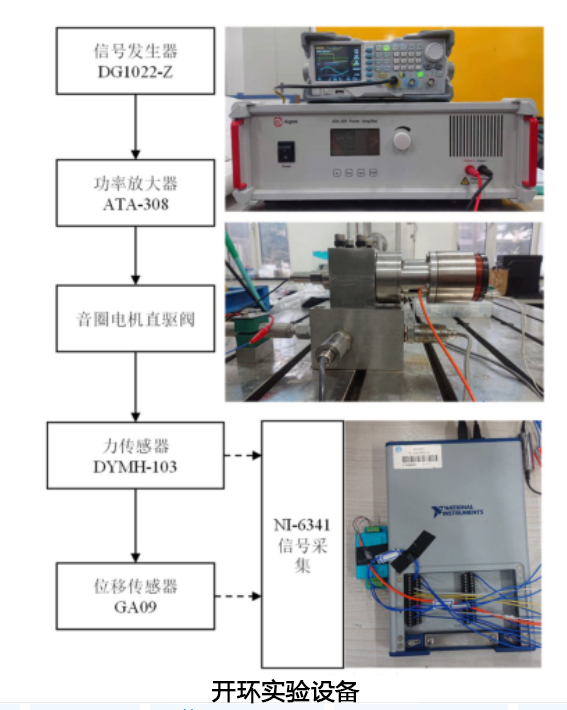
实验设备:
信号发生器,功率放大器,音圈电机直驱阀,力传感器,位移传感器,位置调节器
实验内容:
次利用数学模型和仿真软件MATLAB-Simulink 设计直驱阀的闭环控制器,并分析系统的动态特性和稳态特性。
(1)音圈电机直驱水液压阀的开环试验
开环试验主要是给定音圈电机不同阶跃电压,观察阀芯位移的稳态值,然后与仿真稳态值做以比较,验证模型的准确性或者理论模型与实际模型之间的差距。
(2)基于Simulink的PID闭环控制系统设计
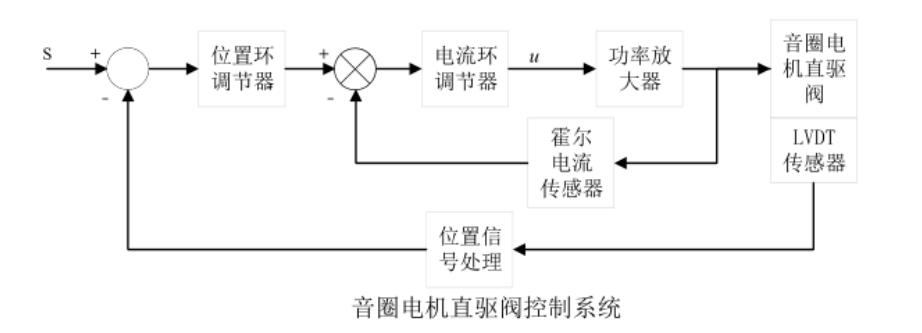
控制系统由位置环和电流环组成,以基于LabVIEW的NI 设备为核心,主要完成电流和位置闭环系统的数据采集和控制算法。充分利用LabVIEW丰富的IO功能,可对信号、稳定地进行检测,便于控制控制系统的实现。
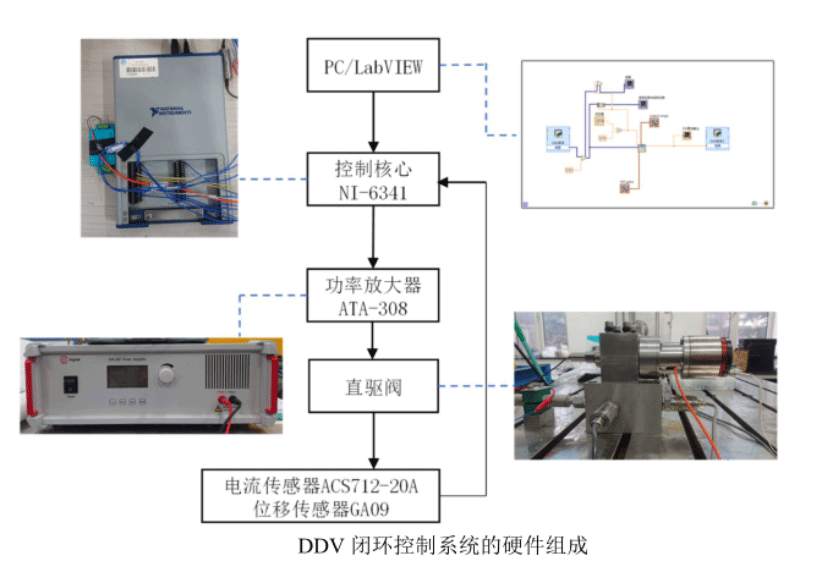
(3)基于LabVIEW的PID直驱阀控制试验研究
音圈电机直驱阀的闭环PID 的实现方法是:在桌面端编写LabVIEW控制程序,配合多功能IO设备NI-6341完成PID控制算法的实现、控制量的输出和电流传感器、位移传感器反馈信号的采集;然后NI-6341将PID控制量给到线性功率放大器,完成控制信号到功率驱动信号的转变,用以驱动音圈电机。
实验结果:
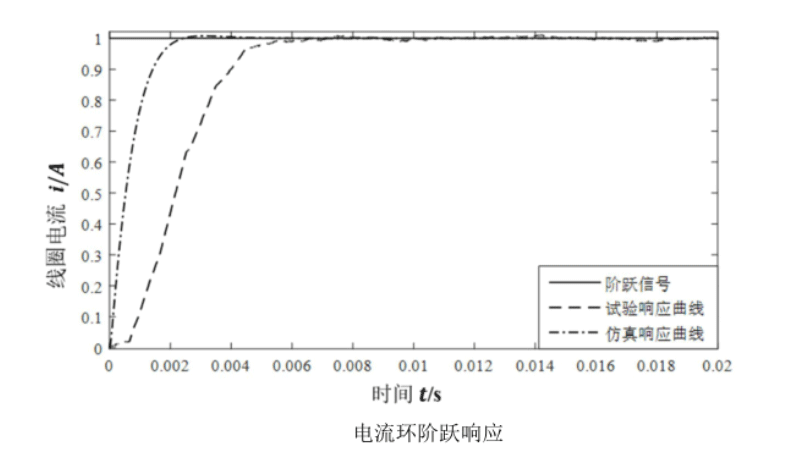
(1)试验与仿真稳态数值对比如图所示,由图可以看出,仿真模型能较好地描述阀芯位移变化的趋势,最大偏差约为阀芯总行程的5%;造成模型预测数据和试验数据的偏差来源是:实际中复位弹簧在压缩量为1~3mm之间时,其劲度系数分别为23N/mm、26.3N/mm、24.5N/mm,而仿真中弹簧的劲度系数设定为常数23N/mm。
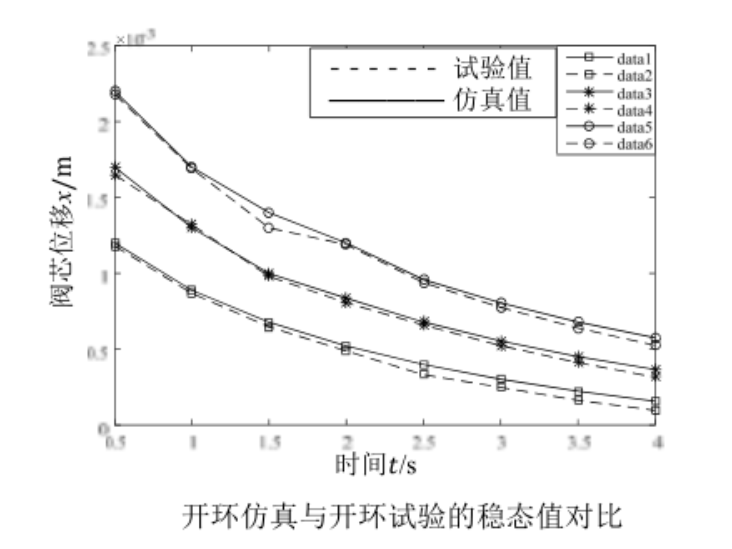
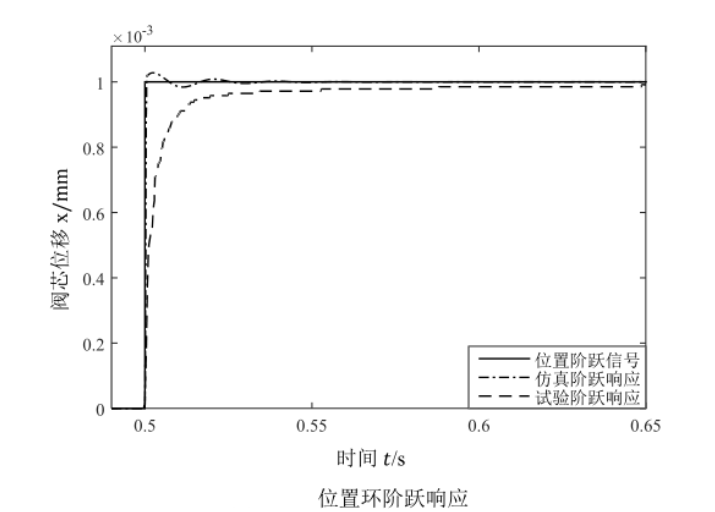
(2)由对比曲线可以看出,试验中的阶跃曲线在调整时间上有较大滞后,仿真中位移在上升阶段很快,并且仿真响应结果比试验结果的位移超调量更大。分析原因,偏差应该来源于水压阀的泄漏造成的阻尼效应,以及仿真模型中未予考虑的封闭容腔中动态流量变化引起的阻尼效应,这两个阻尼作用使直驱阀的整体动态响应不能像仿真中那样好。
-
功率放大器测试解决方案分享——光纤水听器动态压力测试2025-10-10 737
-
Aigtek:功率放大器频谱特性是什么意思2024-11-22 1557
-
功率放大器在电磁系统中的应用2023-12-30 1683
-
功率放大器如何工作的?功率放大器类别和主要指标2023-02-14 1680
-
功率放大器基于音圈电机试验系统设计中的应用2022-11-18 2255
-
安泰功率放大器在氯离子砂浆中的迁移特性研究中的应用2022-06-06 773
-
功率放大器案例:基于动态特性试验研究2022-01-05 1011
-
RF功率放大器的设计2021-12-22 12812
-
功率放大器在氯离子砂浆中迁移特性研究的应用2021-10-09 2195
-
功率放大器在电机液压阀特性测试中的应用综述2021-08-27 935
-
Agitek功率放大器在压电双晶片动力学研究中的应用2018-01-03 3282
-
功率放大器,超声功率放大器定义分类和应用2017-12-15 5896
-
功率放大器的性能指标,功率放大器的应用2017-05-12 4197
-
线性功率放大器设计和乙类和丙类功率放大器设计2008-08-17 9634
全部0条评论

快来发表一下你的评论吧 !
