

双目结构光模组成像基本原理是什么
MEMS/传感技术
描述
首先,我们对比下Gemini2 L与 Realsense D455的差异。
一 Gemini2 L外观展示
Gemini2 L 左侧为realsense,右侧为Gemini2 L
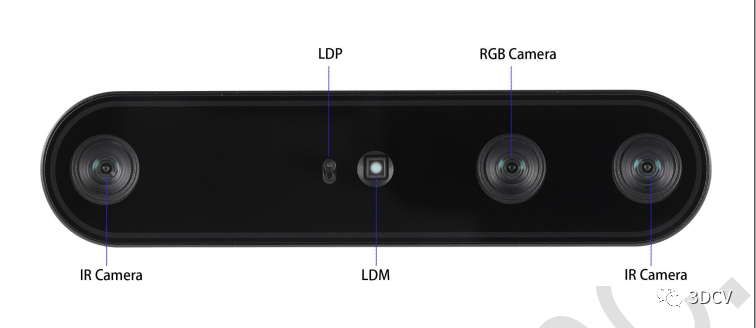
Gemini2 L产品实物图
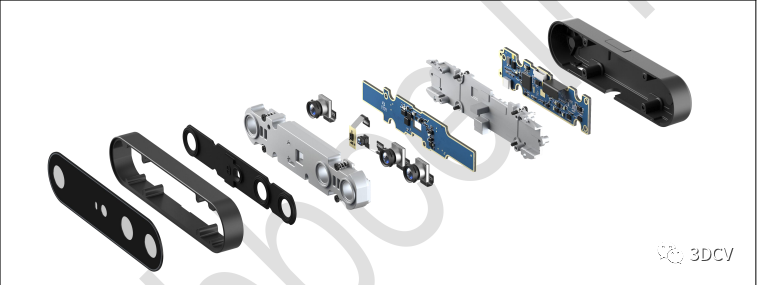
Gemini2 L整机结构组件爆炸图
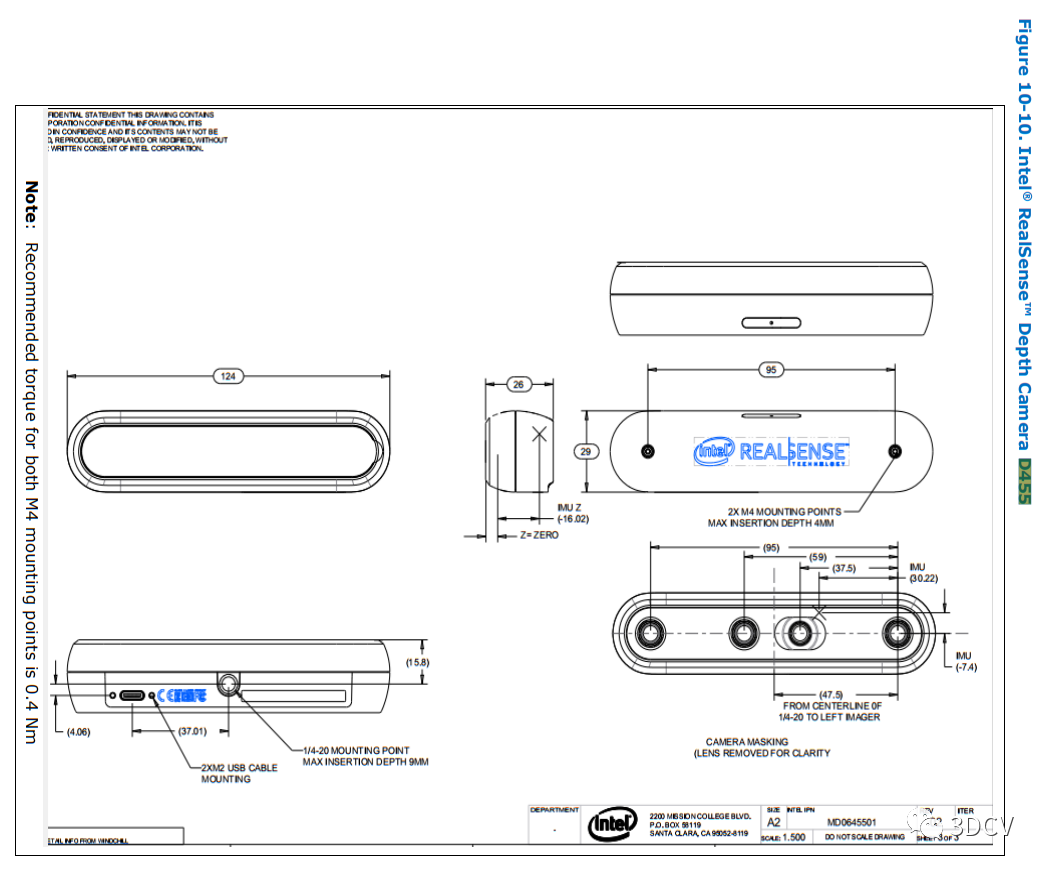
Realsense D455 产品示意图
我认为其中几个重要的术语描述表:
| 术语 | 描述 |
|---|---|
| IR Camera | 红外相机,或红外摄像头 |
| LDMP/LDM | 激光模组,也称红外投影仪(IR projector)等,用于发射结构光图案 |
| Depth Camera | 只包含深度成像模组及对外接口,其中深度成像模组一般由红外投影仪、红外相机以及深度计算处理器组成 |
| PS | Proximity Sensor, 一种接近感应器,用于激光安全保护 |
| LDP | 接近传感器(Proximity Sensor) ,用于激光安全保护以及测距功能 |
| FoV | 视场角,用于描述相机观测给定场景的角度范围,主要有水平视场角(HFoV)、垂直视场角(V FoV)和对角线视场角(D FoV)三种 |
二 双目结构光模组成像基本原理
Gemini 2 系列是基于双目 3D 成像技术的深度相机,主要包括左红外相机(IR Left)、右红外相机(IR Right)、一个激光投射模组(LDM)以及深度计算处理器(MX6600)。激光投射模组用于向目标场景(Scene)投射结构光图案(散斑图案),左红外相机以及右红外相机分别采集目标的左红外结构光图像以及右红外结构光的散斑图,深度计算处理器接收左红外结构光图像、右红外结构光图像后执行深度计算算法并输出目标场景的深度图像
三 双目3D相机模组参数介绍
3.1 红外相机参数表
| 参数 | Gemini2 L |
|---|---|
| 有效像素比 | 1280 x 800 |
| 长宽比 | 16:10 |
| 对焦方式 | 定焦 |
| 快门类型 | global shutter |
| 信号接口 | MIPI |
| 水平FoV | 94° |
| 垂直FoV | 68° |
| 对角线FoV | 104° |
| FoV误差 | ±3.0° |
3.2 激光模组
激光模组(LDM),也称激光发射模组,由垂直腔面发射激光器阵列和光斑扩散器组成。通过在场景上投射静态红外图案以增加低质感场景的质感,提高了 3D 相机系统探测深度信息的能力。正常情况下,Gemini 2 系列激光模组符合 class 1 类激光安全性。
3.3 彩色相机
彩色相机参数表
| 参数 | Gemini2 L |
|---|---|
| 有效像素比 | 1280 x 800 |
| 长宽比 | 16:10 |
| 格式 | MJPEG & YUYV |
| 对焦方式 | 定焦 |
| 快门类型 | global shutter |
| 信号接口 | MIPI |
| 水平FoV | 94° |
| 垂直FoV | 68° |
| 对角线FoV | 104° |
| FoV误差 | ±3.0° |
3.4 接近传感器(LDP)
Gemini 2 系列支持 LDP,LDP 对靠近物体进行检测,用于实现激光安全保护。
Gemini 2 L:LDP 保护标准为≤15cm。
LDP 功能测试方法如下:当挡板靠近 3D 相机时,系统将自动调暗乃至关闭激光以实现激光保护,此时IR图像亮度值将会降低,当亮度小于设定值,说明激光安全保护功能正常。当挡板去掉后激光应正常开启,IR图像会变亮,再次判断亮度值是否大于设定值。
四 题外话:双目基线对精度的影响
首先,Gemini2 L相比于Gemini2一个显著的变化,便是增大了两个IR Camera之间的基线。
我们先来看一下一本书中对于基线对精度的影响的分析(这里考考大家,有知道书名的,欢迎文章底部留言,答对了我们会赠送知识星球半价优惠券):
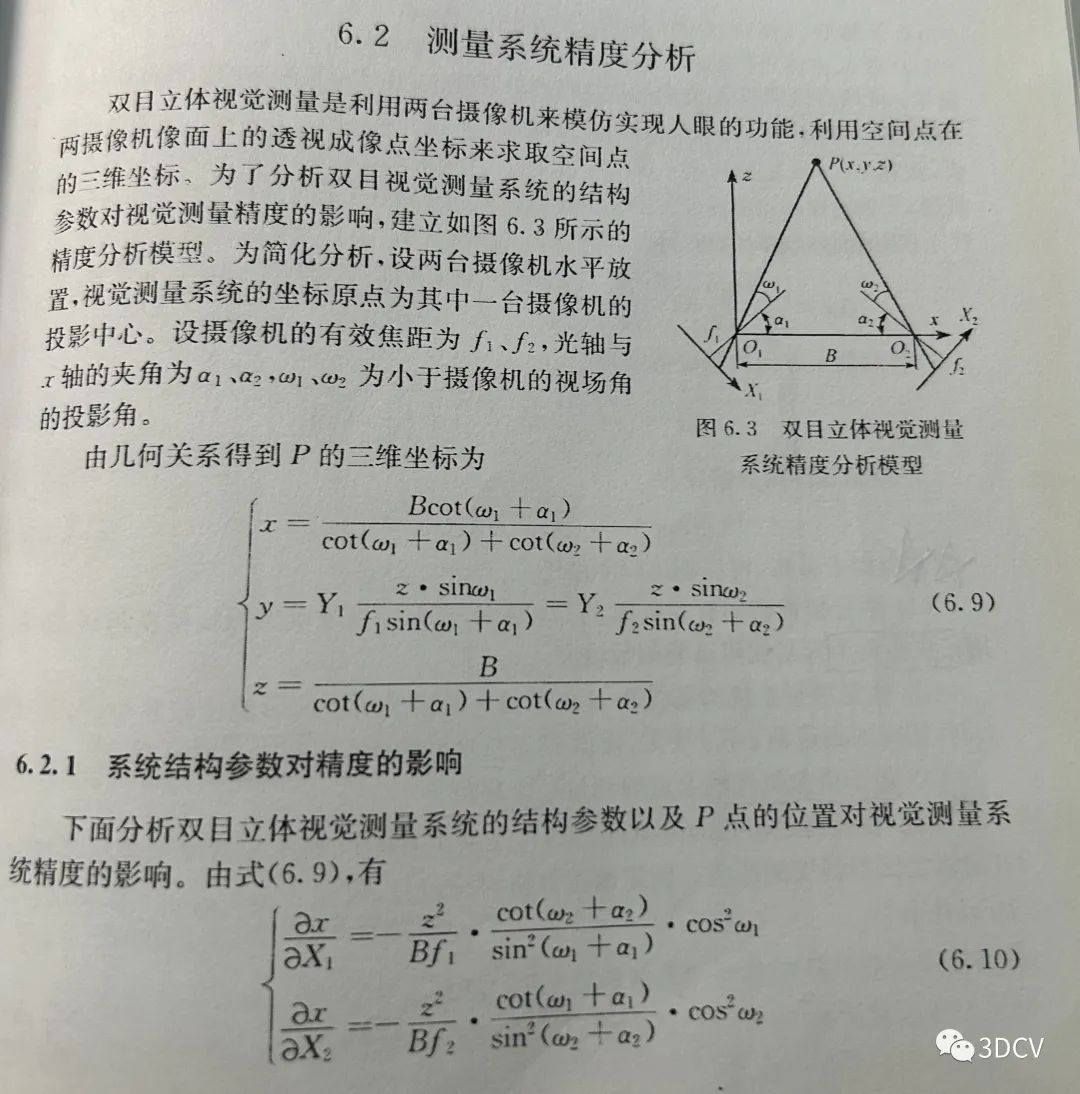
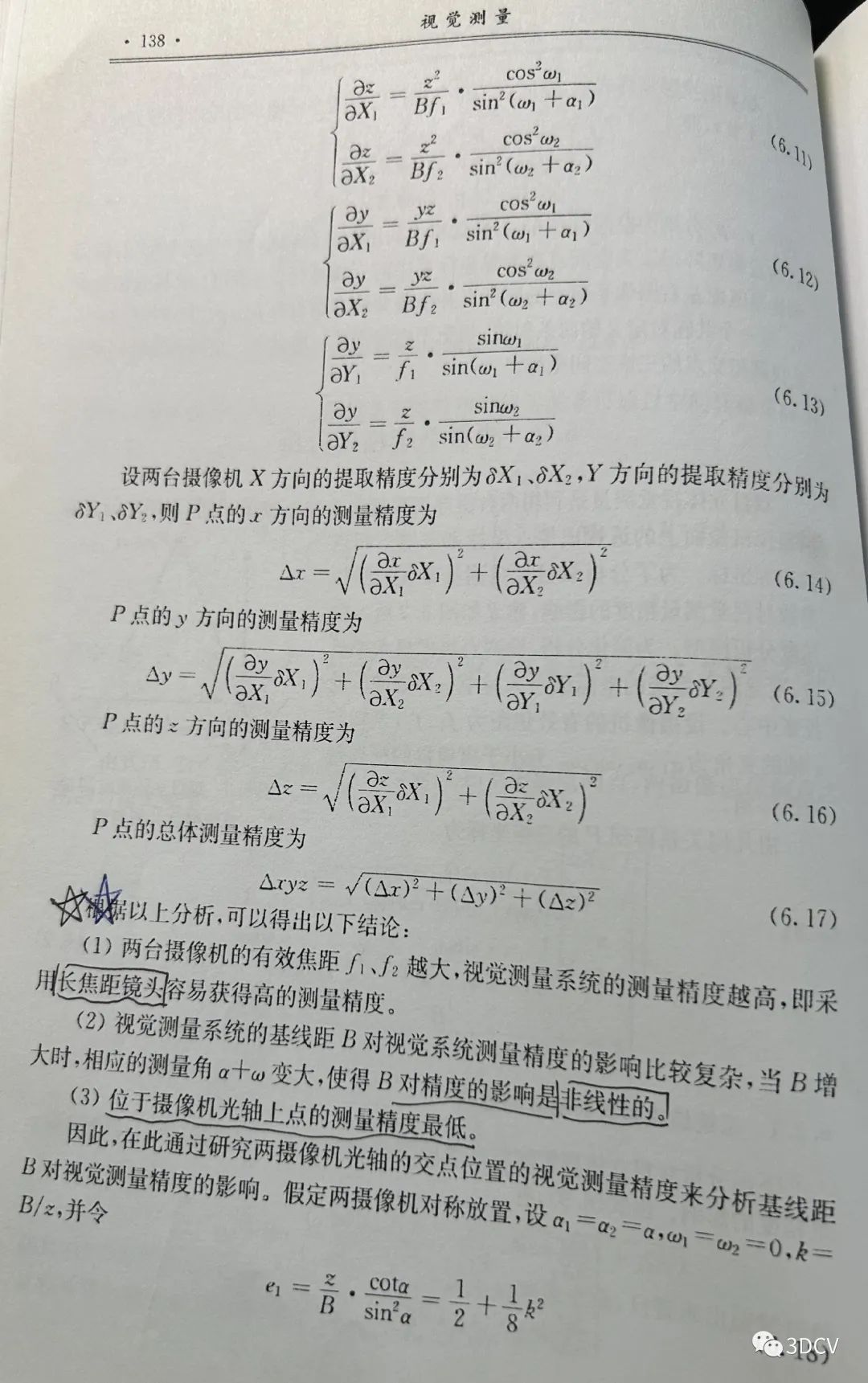
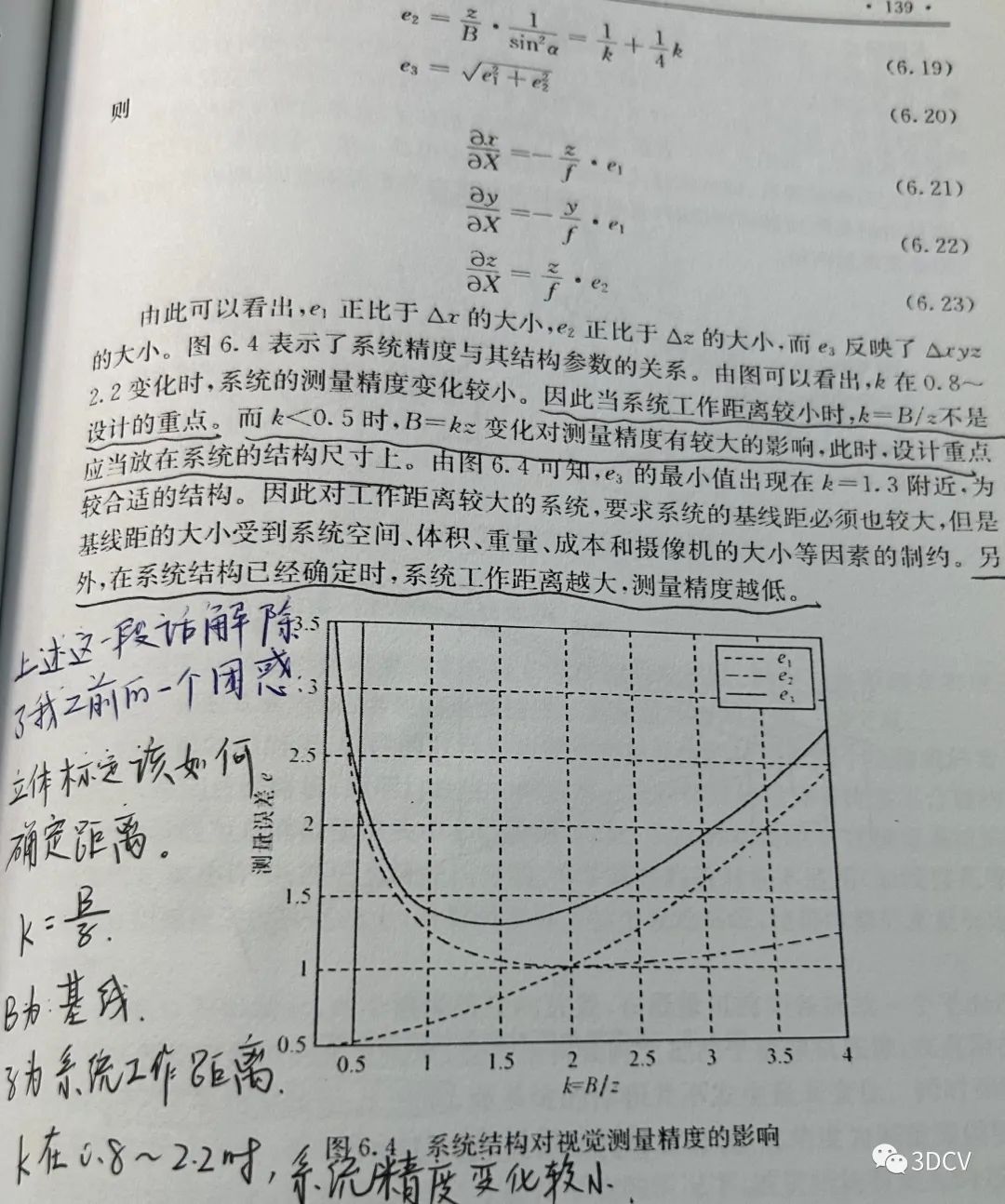
总结来说,也就是基线对测量精度是有影响的,但是也是非线性的。
编辑:黄飞
-
开关电源的结构和基本原理2012-08-20 3435
-
线结构光成像模型是如何建立的2020-06-09 2337
-
红外光的基本原理解析2020-12-15 2075
-
无线充电的基本原理是什么2021-09-15 2680
-
红外光的基本原理2022-01-24 1164
-
TFT-lCD接口的信号组成已经基本原理是什么2022-02-11 866
-
PLC的基本原理及组成2008-11-20 1226
-
光导纤维导光的基本原理2010-01-26 14472
-
摩托电路组成_电启部分_基本原理2016-03-17 1103
-
开关电源的基本原理及组成、不同技术综述2021-07-05 1840
-
光伏逆变器的基本原理2023-07-09 8567
-
探秘动力电池的基本原理与结构2023-10-31 5293
-
光隔离探头的基本原理 光隔离探头的作用2024-01-08 2714
-
数字示波器的基本原理及结构组成2024-05-10 5541
-
数字源表的基本原理与结构组成2024-05-15 2740
全部0条评论

快来发表一下你的评论吧 !
