

步进驱动器+步进电机+西门子PLC控制案例
工业控制
描述
步进电机常用来做定位控制,它可以由PLC输出的脉冲数量控制旋转的角度(相对来说可以是距离),脉冲的频率控制步进电机旋转的速度。但用于控制精度不是很高的场合,简单、经济、控制方便;对于控制精度要求很高的场合,就得使用伺服控制系统了。
步进系统=步进驱动器+步进电机。步进电机由步进驱动器来驱动,相当于驱动电源,且它受外部的脉冲信号和方向信号控制(这里举例是西门子PLC输出脉冲),进而控制步进电机的旋转角度和速度。

步进驱动器+步进电机+西门子PLC(CPU 222 CN)
相关的定义
1、驱动器:用于PLC控制步进电机的媒介,负责把PLC给的脉冲信号经过放大后,输给步进电机,使电机按照PLC和驱动器给定的参数运行。
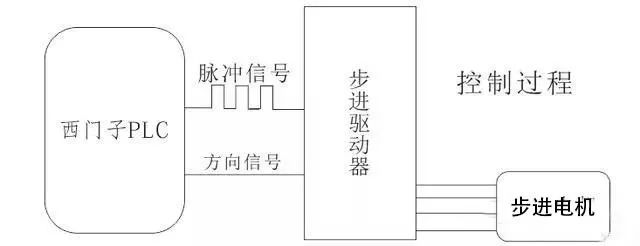
控制过程
2、步距角:每个脉冲使步进电机旋转的角度,比较普遍的是1.8°,这个一般是不可以改变的啦。
例:在未设定细分情况下,控制步距角为1.8°的步进电机转动一圈(360°),需要PLC发出多少个脉冲?
360°/X=1.8°/1,所以X=200个脉冲。
3、细分:实际应用中发现,步距角很大的话,每次转动的角度也就很大,会引起振动,相应的控制误差也会变大。所以引入了细分的功能。意思就是,通过驱动器的DIP开关把步距角多分几分,让电机转动更加平稳。
例:步距角为1.8°,设定10细分,那么PLC每发出一个脉冲,电机只转动0.18°,步进电机转动一圈(360°),需要PLC发出多少个脉冲?
360°/X=0.18°/1,所以X=2000个脉冲。
小结:步距角越大,脉冲数越少;步距角越小,脉冲数越多。
步进系统硬件介绍(以普菲德步进电机为例)
1、步进驱动器

普菲德驱动器说明
步进电机的方向控制一般有两种:
A)脉冲+方向:PUL有脉冲产生时,电机就会转动,方向由DIR来决定。
B)正向脉冲+反向脉冲:当PUL有脉冲产生时,正转;当DIR有脉冲产生时,反正。但PUL与DIR不能同时有脉冲产生。
2、步进电机

步进电机参数
当A.B 两相绕组调换时,可使电机反向。
与PLC的接线图
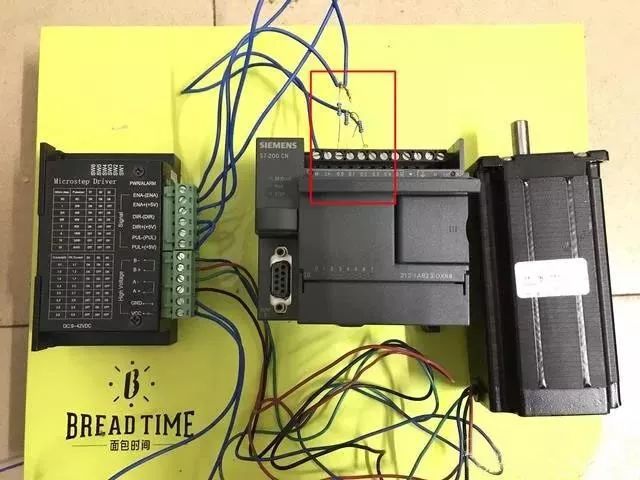
该步进电机的信号电压是5V,西门子PLC使用的电压为24V,所以要接入驱动器,需要串接1.2K,1/4W的电阻,如上图红色部分所示。
西门子PLC(CPU222)能输出高速脉冲有两种:
1、PTO(占空比50%)
2、PWM(占空比可更改)
利用以上两种高速脉冲输出指令可以控制步进驱动器,进而控制步进电机,进而控制一些具体设备的移动与速度。
编辑:黄飞
-
步进电机驱动器细分怎么调2024-06-12 6030
-
步进电机定位控制的常用方法2023-10-30 4943
-
EtherCAT转Profinet网关连接西门子PLC与凯福科技总线步进驱动器通讯2023-06-26 2166
-
现场纪录丨YE系列步进驱动器连接Ethercat转profinet网关2023-05-29 1620
-
西门子S7-1200PLC控制步进电机的组态编程和具体步骤2023-05-16 1917
-
西门子200PLC步进控制(入门)2023-04-19 1226
-
基于西门子S71200 PLC的步进电机控制2023-03-22 1512
-
东莞爱维EVER总线步进电机驱动器profinet连接实例2023-03-20 754
-
采用PLC实现对步进电机的控制(二)2023-03-02 6365
-
步进驱动器与plc接线图2021-02-01 32370
-
西门子S7-200驱动步进电机心得2018-06-27 1404
-
步进电机驱动器及细分控制原理2016-01-12 1581
-
西门子Smart的PLC项目_PLC双脉冲模式控制伺服驱动器正反转2015-12-11 3036
-
适用PLC使用的步进电机控制驱动器2009-06-18 3147
全部0条评论

快来发表一下你的评论吧 !
