

磁铁的激励方式及磁编产品简介
描述
磁铁激励的方法
在位置感测应用中有许多应用霍尔效应的方法下面介绍最为普遍的方法。
正面
对于“正面”激励应该有足够的磁铁行程以至少提供传感器最大工作和最小释放特性时10%磁通量的过激励目标对准在最大灵敏度该点上“正面”移至传感器然后向后退。
单极正面
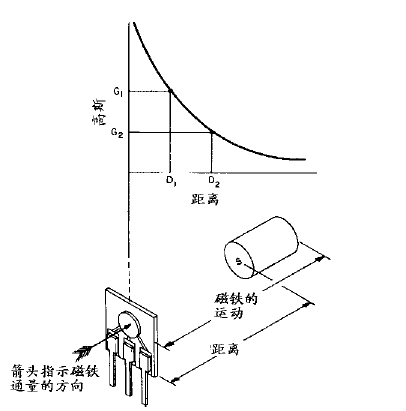
MT单极开关产品与磁铁移动方式
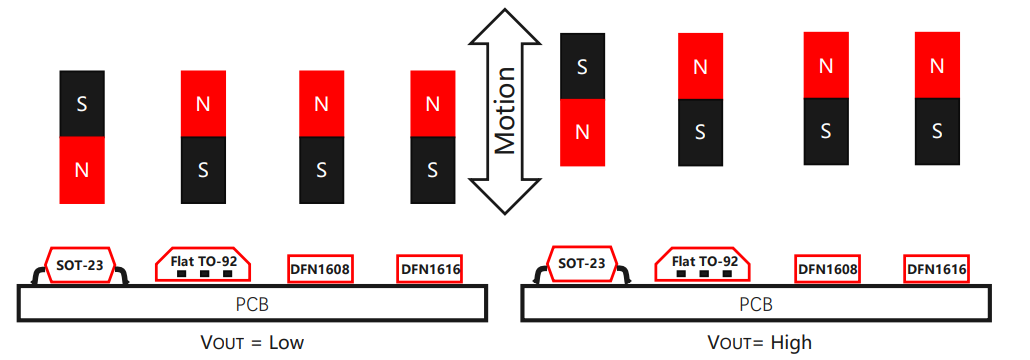
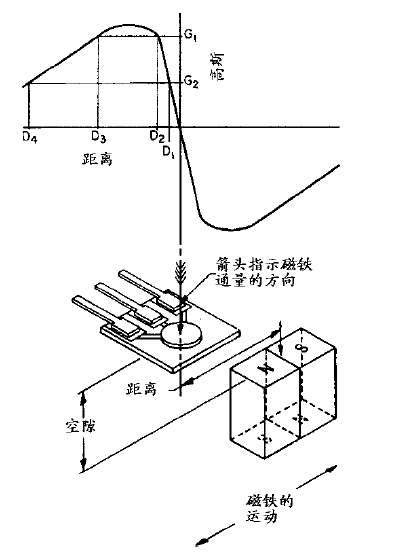
滑过
对于“滑过”激励磁铁应通过感测表面一段距离以至少提供超过最大工作特性时10%磁通量的过激励目标以指定的距离移过传感器表面。
单极滑过
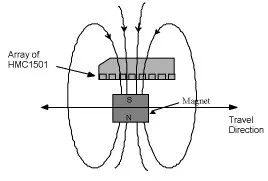
HMC1501/HMC1512磁铁移动方式
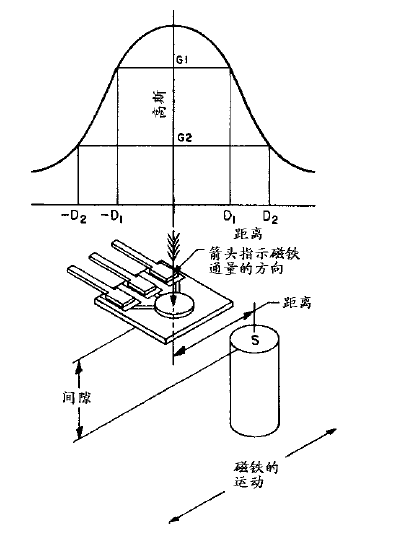
双极滑过
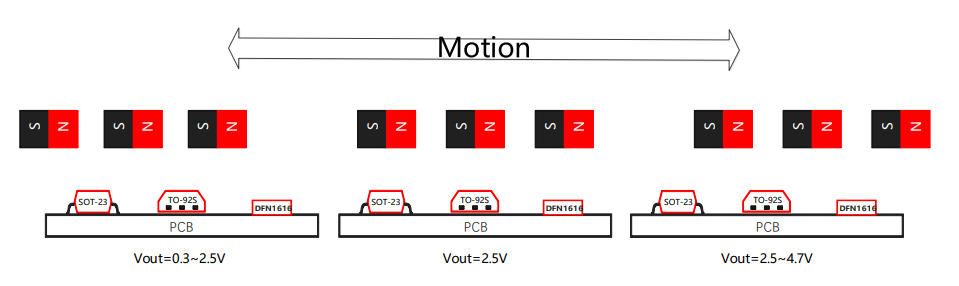
MT910X线性与磁铁相对移动位置
旋转
一个旋转的目标如一个环形磁铁可以提供通/断交替的激励方式。
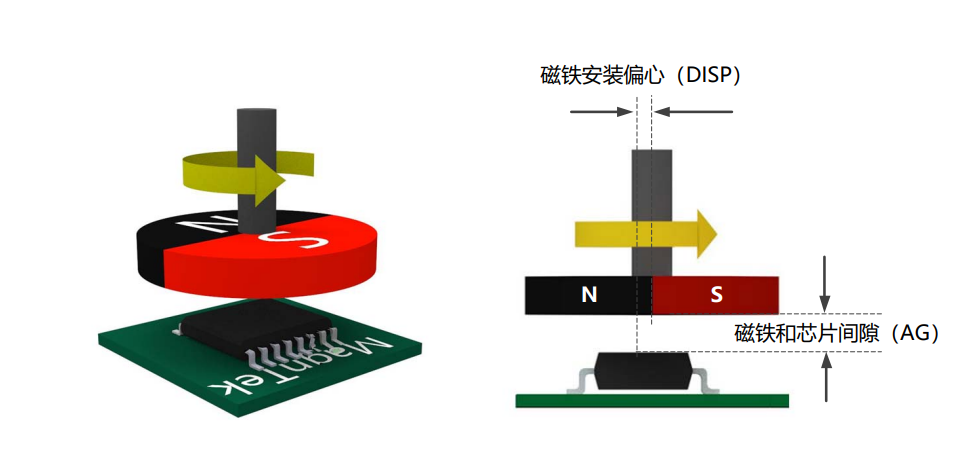
MT6835
MT6835高速磁性角度编码IC
基于先进的AMR各向异性磁阻技术,0~360°绝对角度位置检测;
21位核心角度分辨率,支持最高120,000转/分钟的转速;
角度输出延时2微秒~10微秒;
提供客户端自动非线性校准模式,无数据交互自动计算补偿,实现<土0.07°的INL;
-40~125°C 温度范围内均可工作;
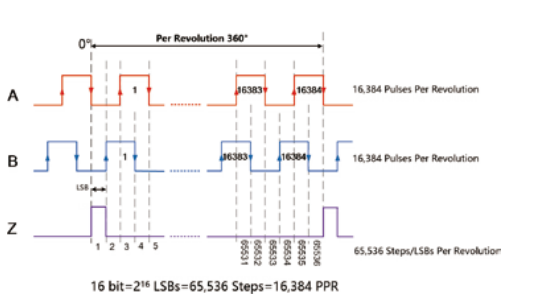
可同时支持增量ABZ、增量UVW、PWM绝对值和4线SPI总线输出;
增量ABZ输出支持1~16,384脉冲/圈,任意整数分辨率客户可编程;
增量UVW输出支持1对极~16对极任意整数对极客户可编程;
内置3.3V~5.0V 均可编程的EEPROM;
应用
绝对角度位置传感器;
直流无刷电机控制;
伺服电机控制;
闭环步进电机控制;
替换部分光电编码器的应用;
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
产品简介 | RZ/A系列MPU2024-05-24 1633
-
LT6711GX—产品简介2024-01-02 1872
-
数字隔离器产品简介2023-11-29 1090
-
UltraScale架构和产品简介2023-09-15 695
-
FPC产品简介及设计规范.zip2023-03-01 670
-
ZDS2024 Plus示波器产品简介2022-10-17 1043
-
AX58400产品简介2022-03-03 1144
-
变频串联谐振耐压装置产品简介2021-09-03 1874
-
百川ESD产品简介 2017版2017-10-09 1327
-
汽车电子 TASKING 产品简介2017-04-07 3569
-
光网络产品简介2016-04-14 636
全部0条评论

快来发表一下你的评论吧 !
