

不同3D激光SLAM方案对比分析
工业控制
描述
一.测试的SLAM方案
本次我共测试了github上开源的8种方案,按照特点可分为
| 特点 | 方案 |
|---|---|
| 纯Lidar | A-LOAM(港科大版本的LOAM),hdl_graph_slam,BLAM |
| Lidar与IMU松耦合 | LeGo-LOAM,SC-LeGo-LOAM(在LeGo-LOAM上使用了一种新的回环检测方法) |
| Lidar与IMU紧耦合 | LINS,LIO-SAM,LIOM |
说明
上述方案中除了hdl_graph_slam和BLAM外,其余方案都是基于LOAM或LeGo-LOAM
在实验中,hdl_graph_slam和BLAM在所有数据集上的性能均不理想,因而下面不再讨论。而SC-LeGo-LOAM的性能较之LeGo-LOAM也没有明显改善,因而下面也不再讨论。
原生Demo
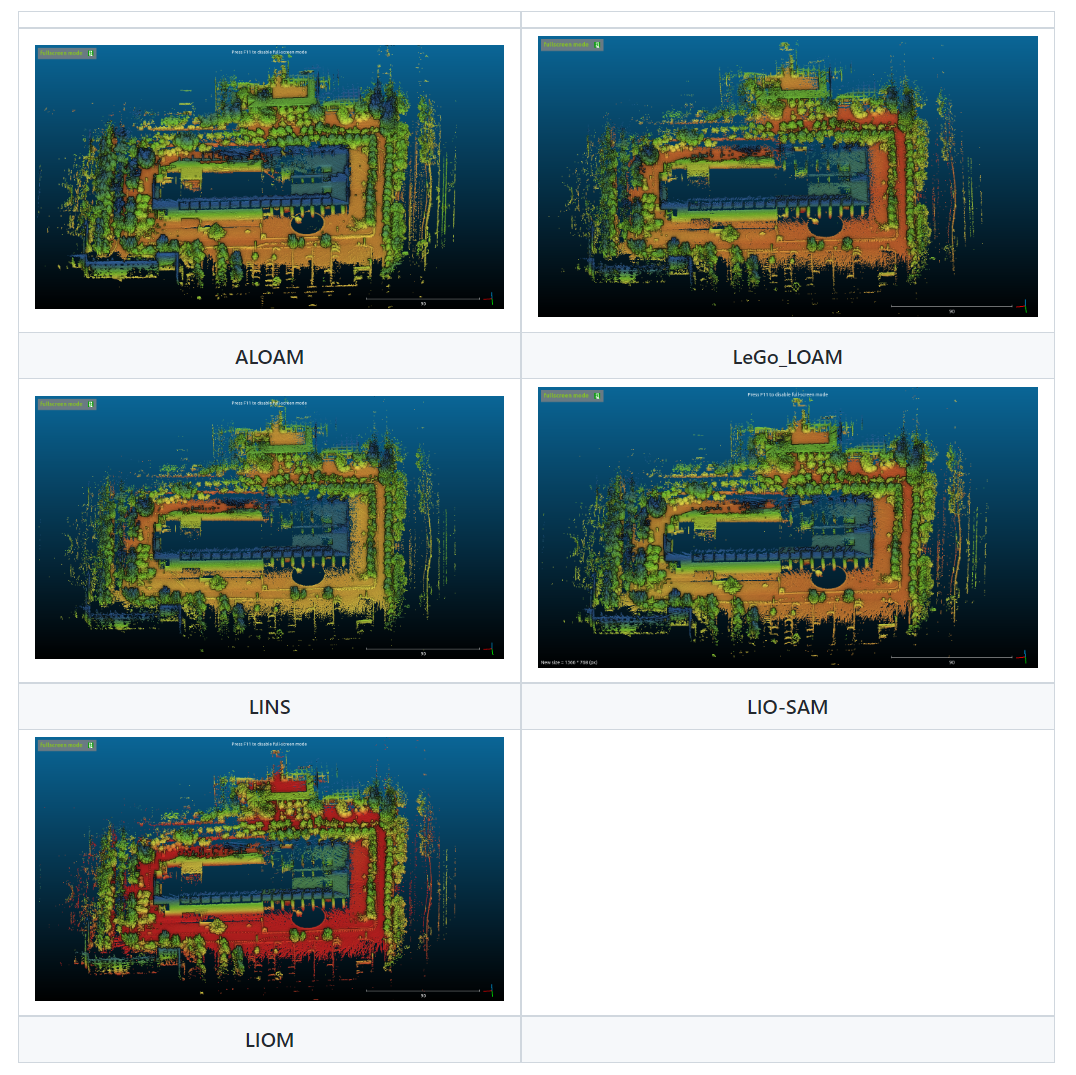
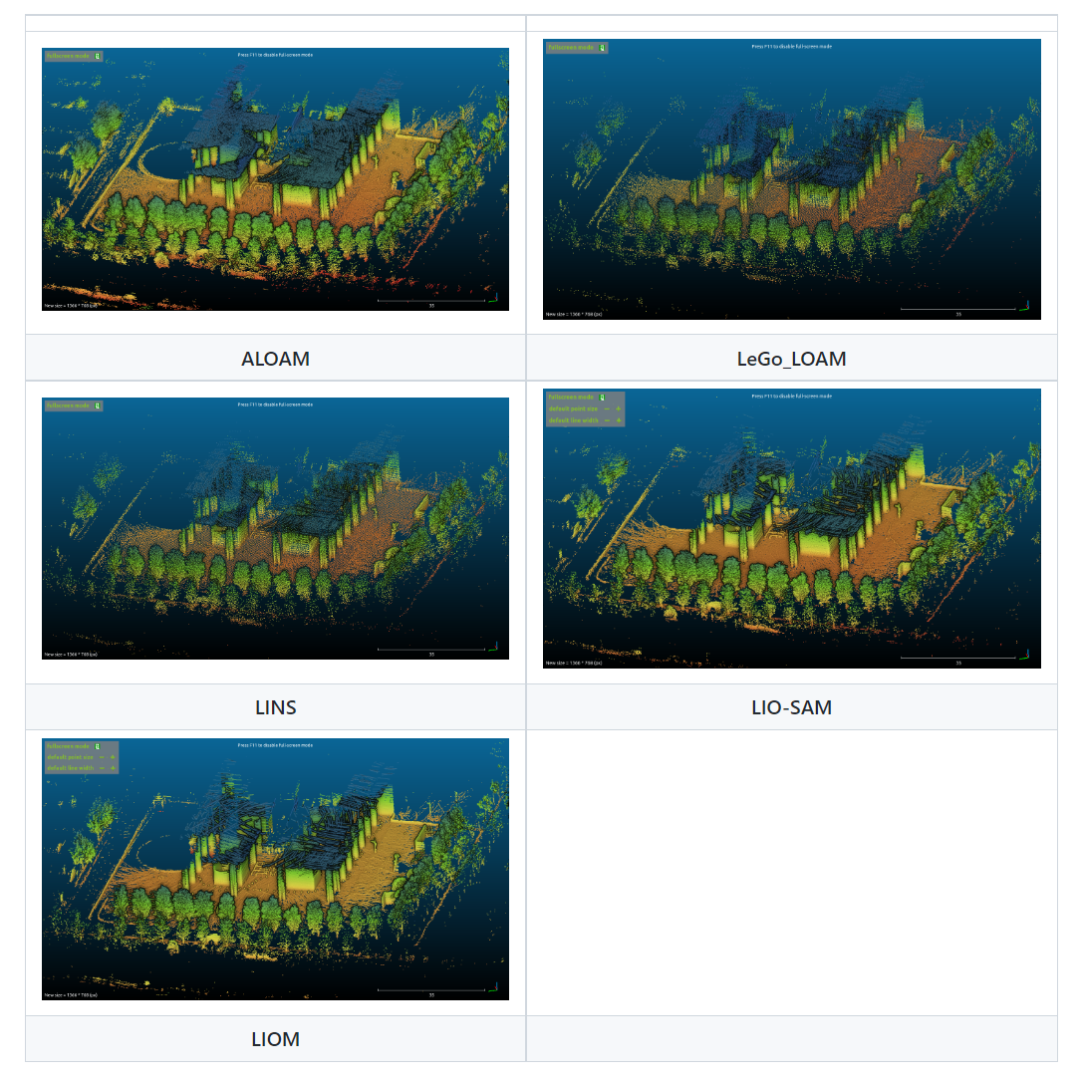
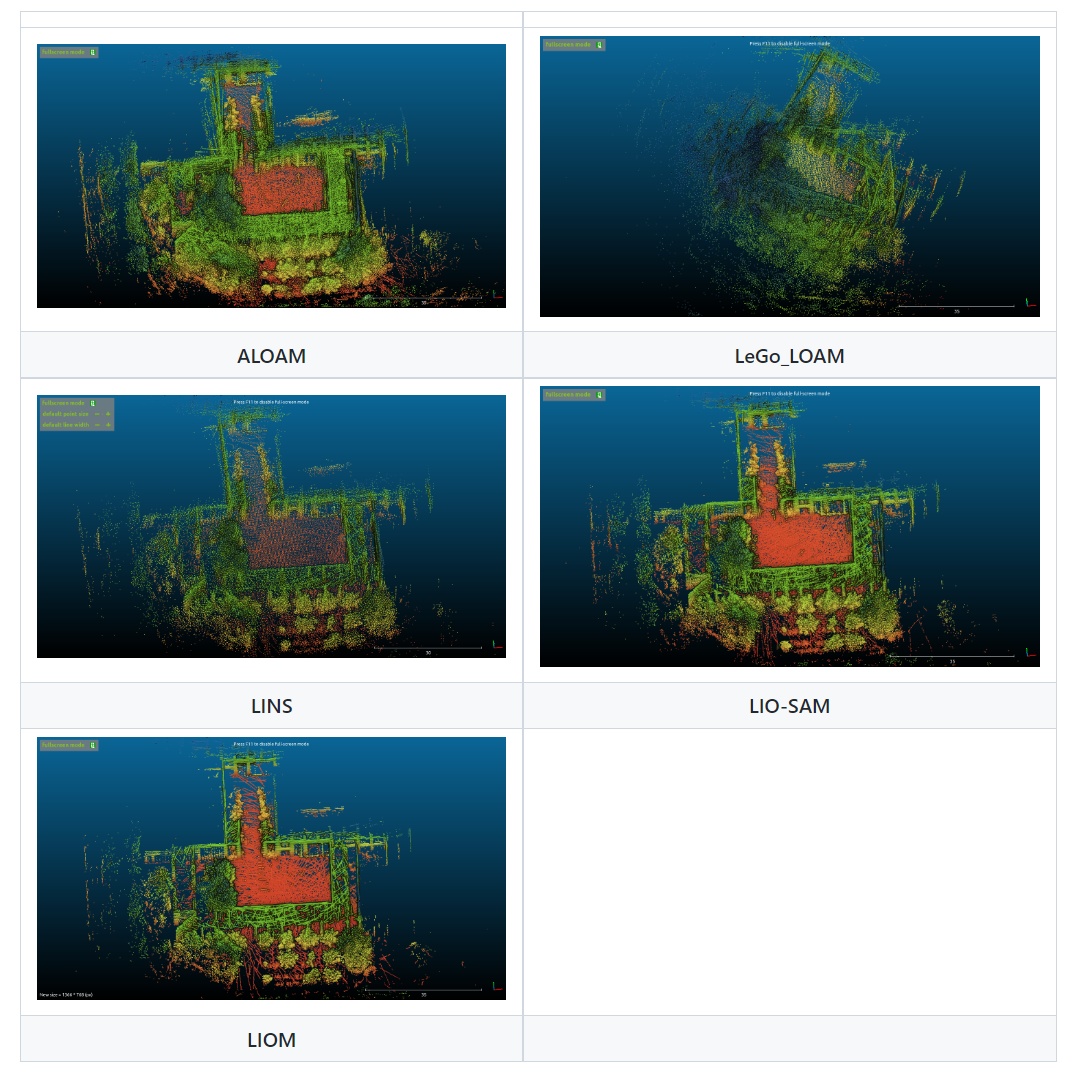
在第二部分的实验结果展示中,为了方便比较,不同方案得到的结果形式都进行了统一化,但实际上各种方案在执行时的视觉效果是不同的,这里展示了利用各种方案的原生配置所得到的demo,日后可根据需要配置成下面的任意一种效果:

二.实验
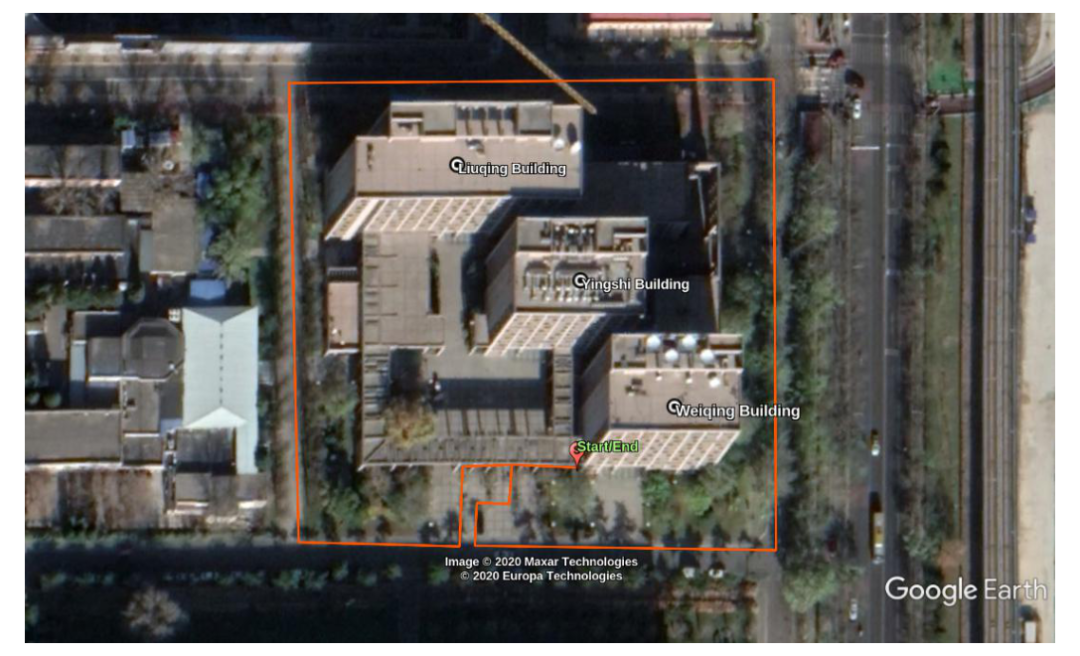
实验共使用了5段在伟清楼附近采集的数据:
| 数据段名称 | 采集时间 | 传感器配置 | 路程 | 备注 |
|---|---|---|---|---|
| museum_out | 2020.7.25 | 10Hz Lidar+ 100Hz IMU | 639m | 无 |
| museum_in | 2020.7.25 | 10Hz Lidar+ 100Hz IMU | 226m | 回环 |
| outdoor3 | 2020.7.27 | 10Hz Lidar+ 400Hz IMU | 481m | 回环 |
| outdoor4 | 2020.7.27 | 10Hz Lidar+ 400Hz IMU | 562m | 回环 |
| aggresive | 2020.7.27 | 10Hz Lidar+ 400Hz IMU | 138m | 回环,剧烈运动 |
说明
两日的数据:由于在7.25采集的两段数据中没有明显看出加入IMU的优势,于是在7.27我将IMU频率调高至LINS,LIOM和LIO-SAM所采用的400Hz后又采集了三段数据。
IMU的校正:在每次采集数据前,我都将IMU的z轴与重力加速度重新对齐,方法是利用手机软件(如:水平仪,AIDA64等)测量,寻找到一个较好的水平面,将实验设备置于其上,利用Mtmanager对IMU进行Alignment Reset,实现z轴的重置。
IMU初值:IMU紧耦合算法中需要提供IMU的初始零偏(bias)和噪声方差,而每段数据在开始时的一段时间内实验设备都是静止的,因而我利用这段时间内(约5s)的IMU测量值进行了零偏和噪声的估计。需要注意的是,由于IMU是粘贴在Lidar外壳上的,而Lidar在扫描时会引起外壳周期性的振动,这也反映在了IMU的测量值中,如下图:
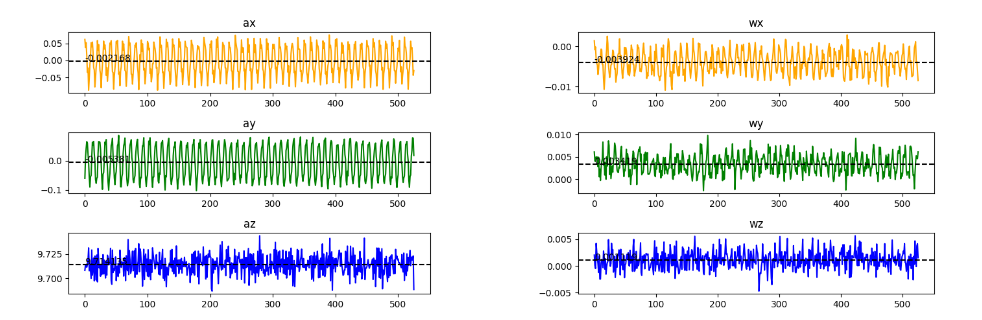
x轴和y轴的加速度ax,ay和角速度wx,wy有明显的周期性,周期为雷达的扫描周期。而经过进一步的DFT分析,可以发现ax,ay,wx,wy,wz在10Hz和40Hz的频谱分量最高,说明雷达振动的基波和4次谐波影响较大。为了去除振动影响,我暂时采取了时域拟合的方法,利用基波和4次谐波的组合来拟合测量信号,使得总误差最小,然后将拟合出的振动信号从测量信号中减去,将所得信号的均值和方差作为IMU的零偏和噪声方差。
1. museum_out
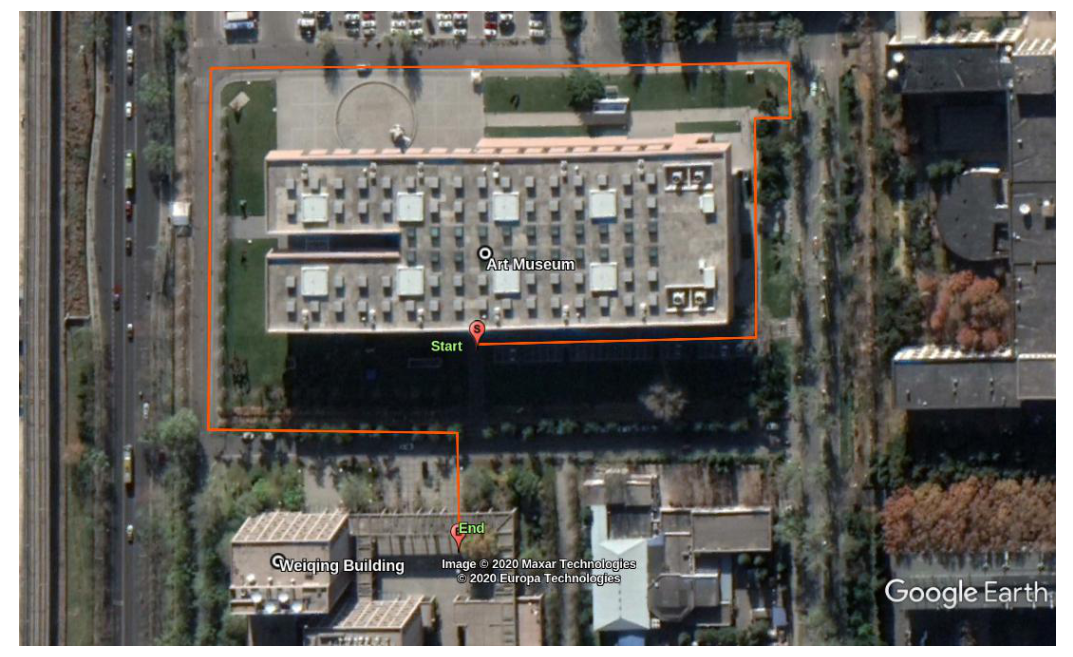
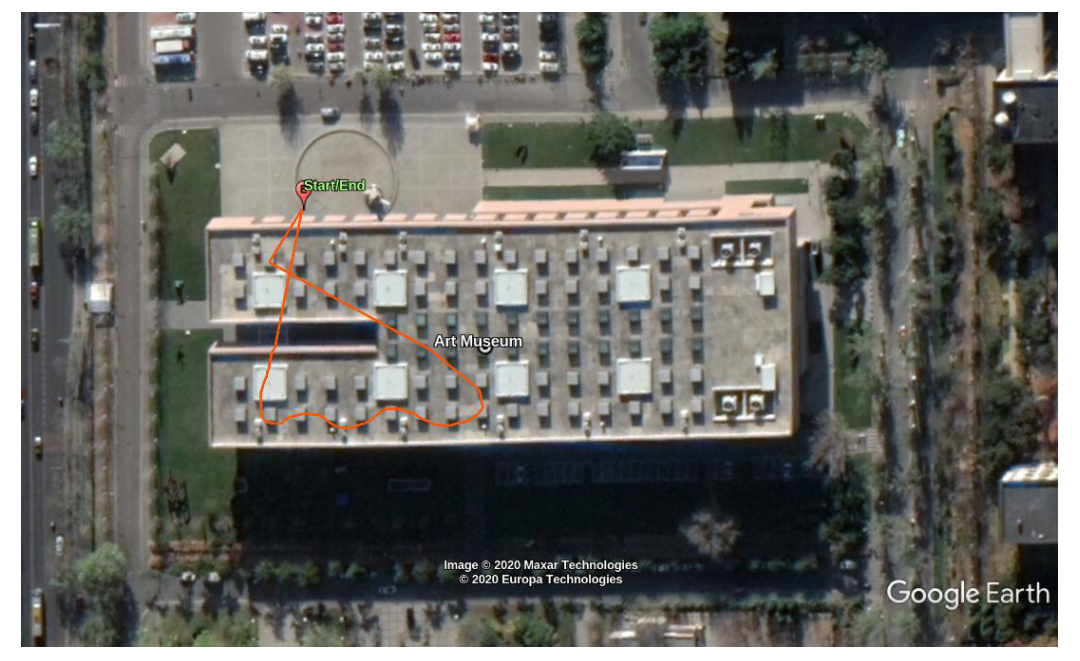
采集路线:从艺术博物馆停车场出发,环绕外围一周后来到伟清楼旁空地。
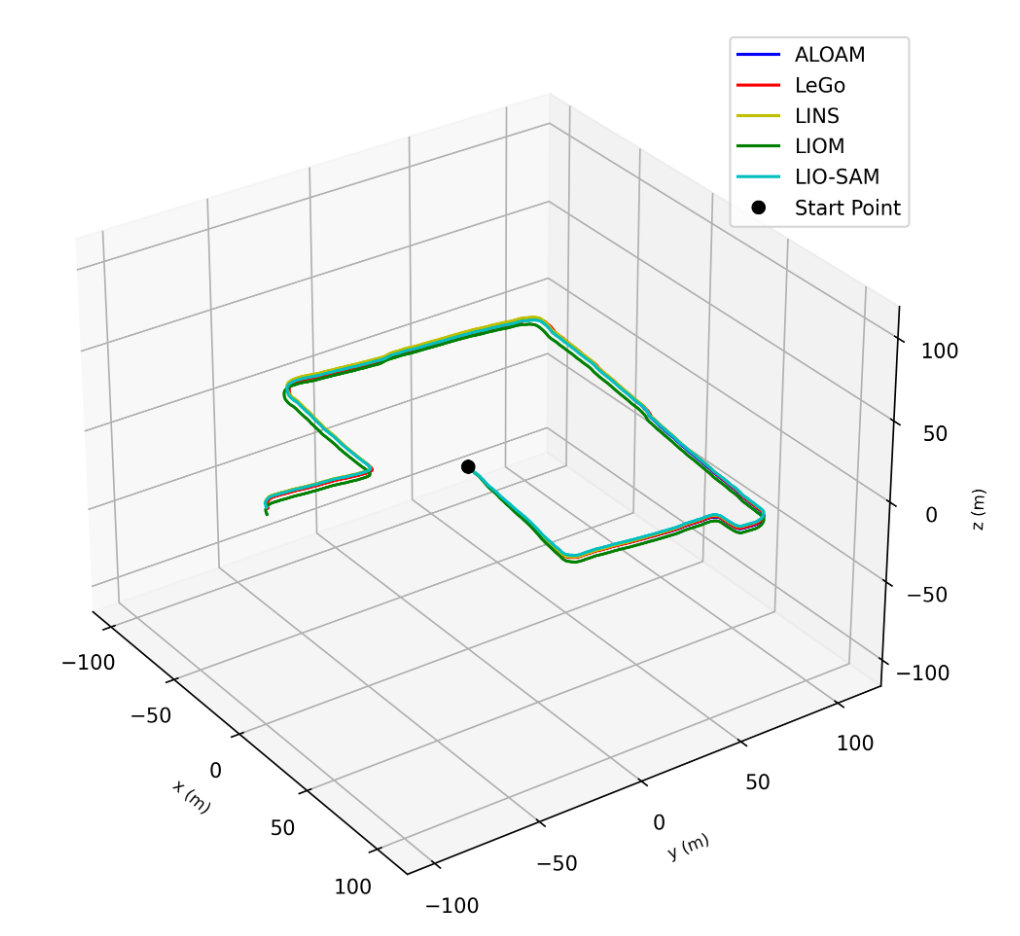
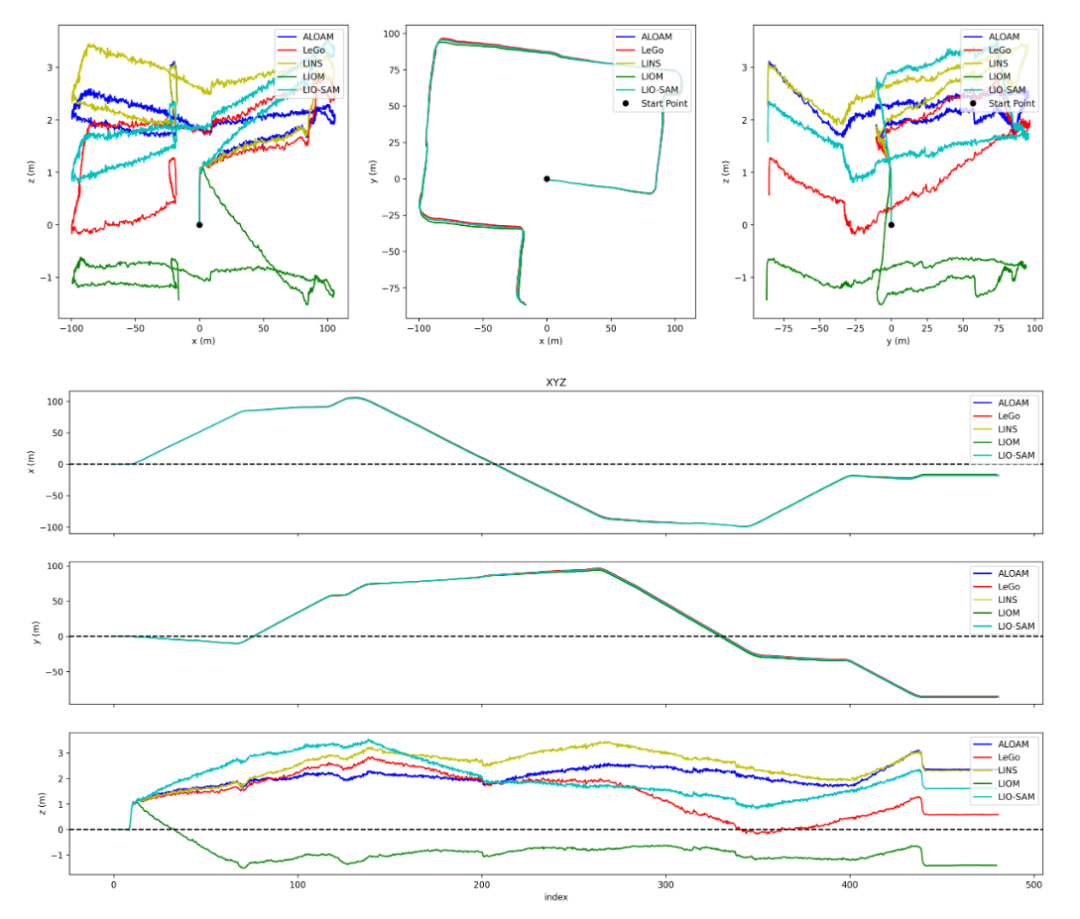
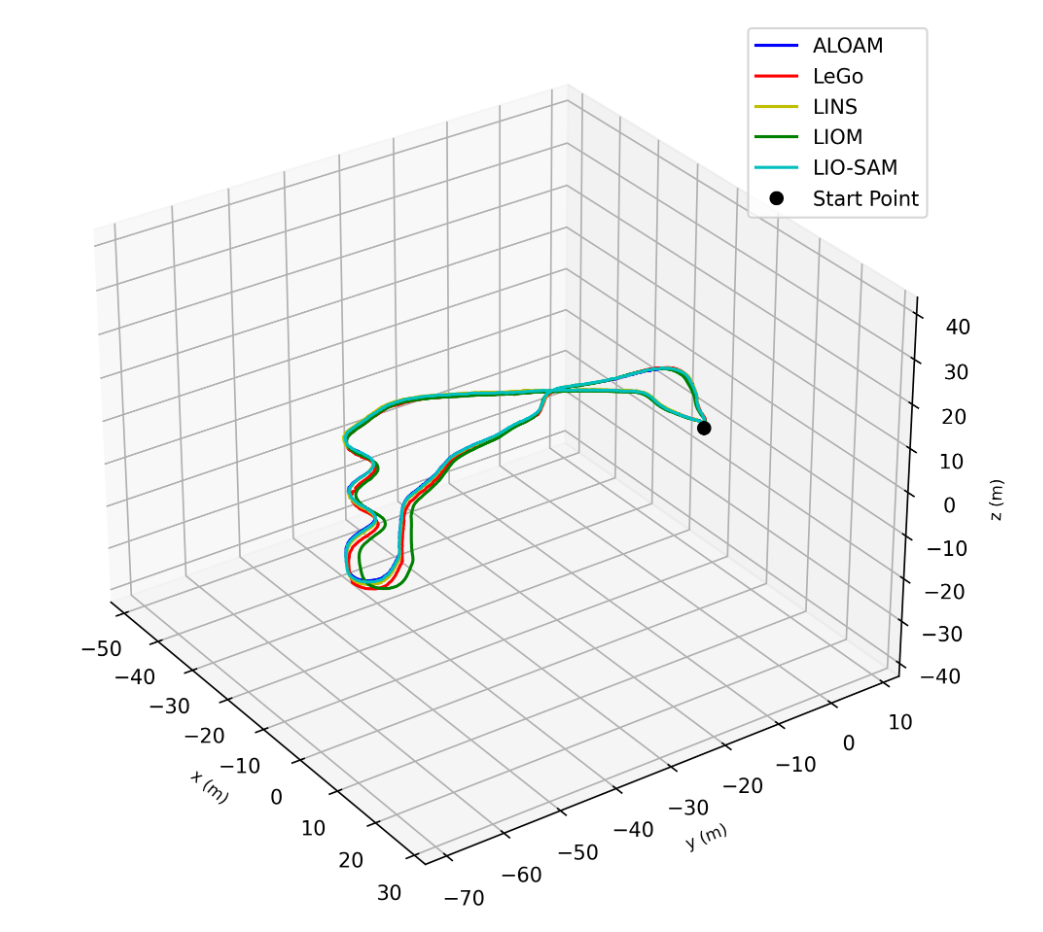
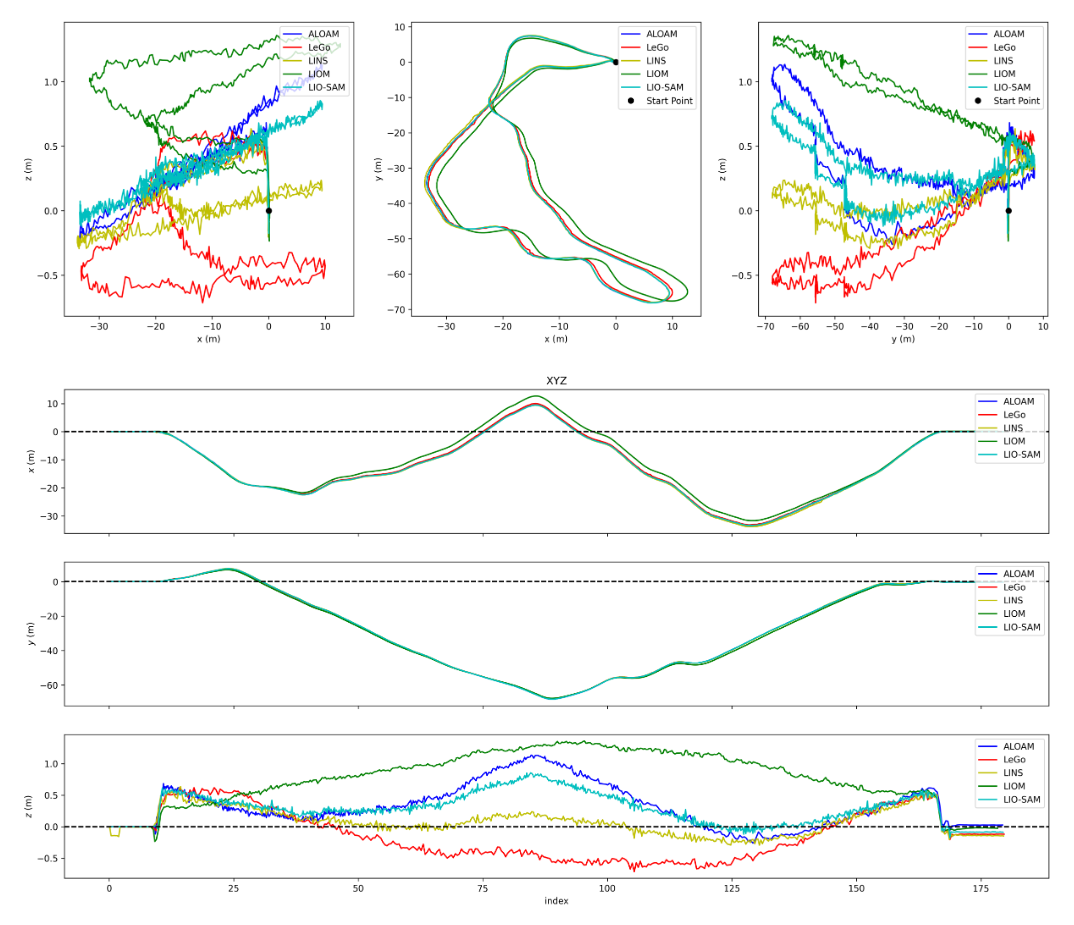
定位结果:
建图结果:
结论:
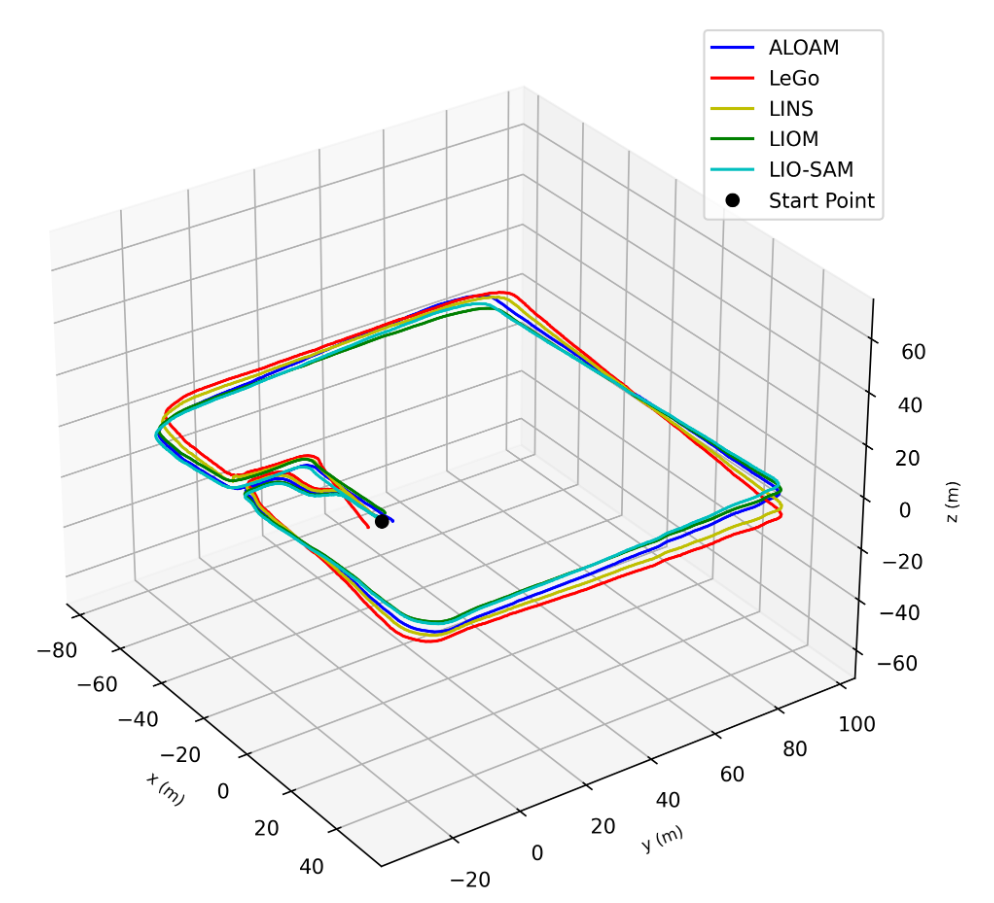
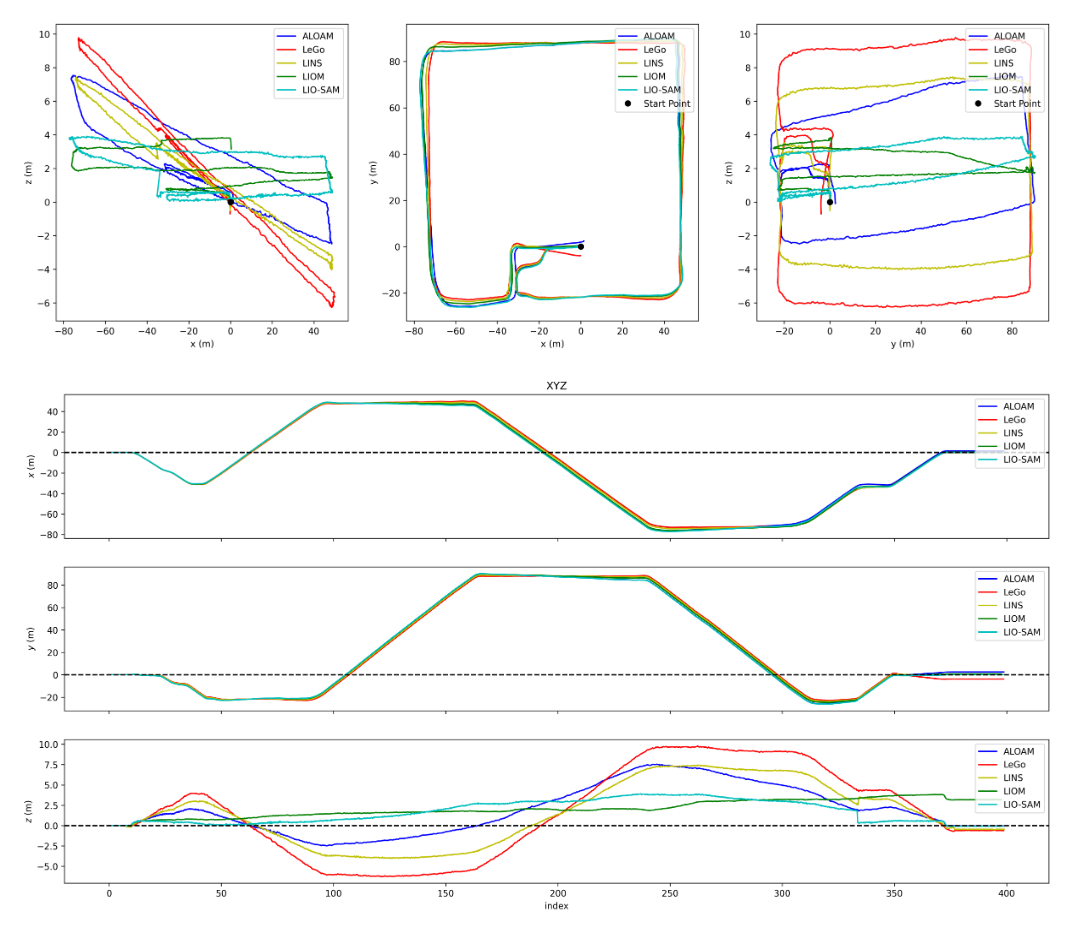
从定位结果上看,各种算法在x,y的估计上比较接近,分歧主要在高度z的估计上。根据实际情况,起点和终点的高度差并不是很大,LIO-SAM和LeGo-LOAM在这点上性能较好,其余方案则略有不足。
从建图结果上看,各算法的建图效果相当,只是LINS和LeGo-LOAM的地图稍微稀疏一些。
2. museum_in
采集路线:从艺术博物馆水池出发,在内场游走后回到原点:
定位结果:
建图结果:
结论:
从定位结果看,LIOM与其他方法有较大偏移,但轨迹的形状却是相似的,这是由于LIOM对IMU和Lidar外参进行了校正,使得坐标系有所偏移。ALOAM和LIOM很好地闭合了回环,但LIO-SAM,LINS和LeGo-LOAM的性能也还不错,也接近闭合。
从建图结果上看,各算法的建图效果相当,只是LINS和LeGo-LOAM的地图稍微稀疏一些。
3. outdoor3
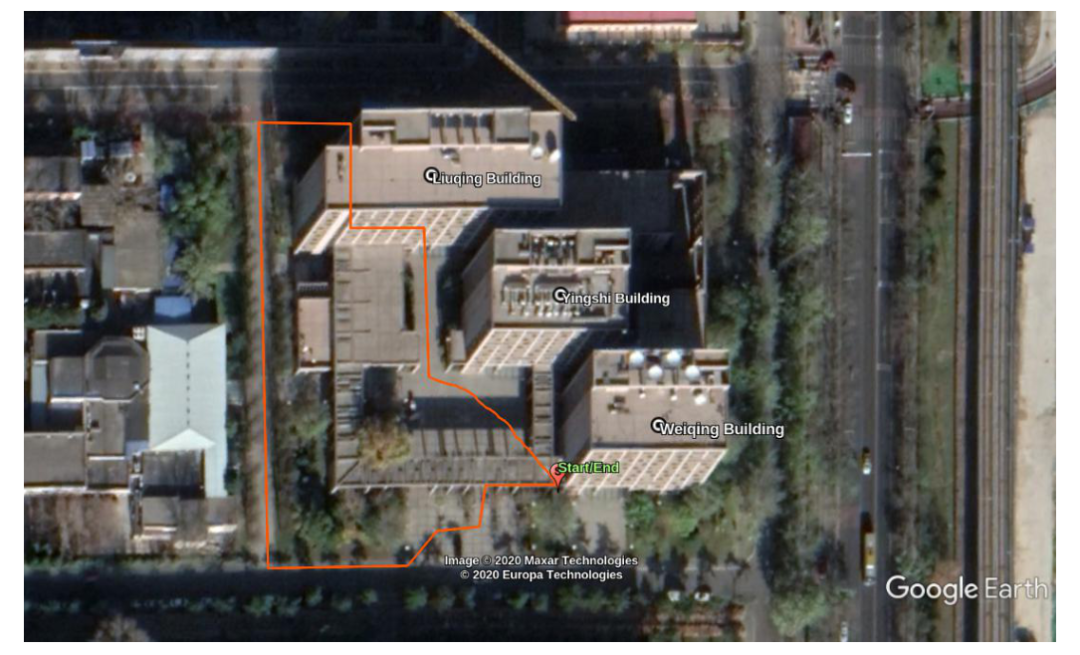
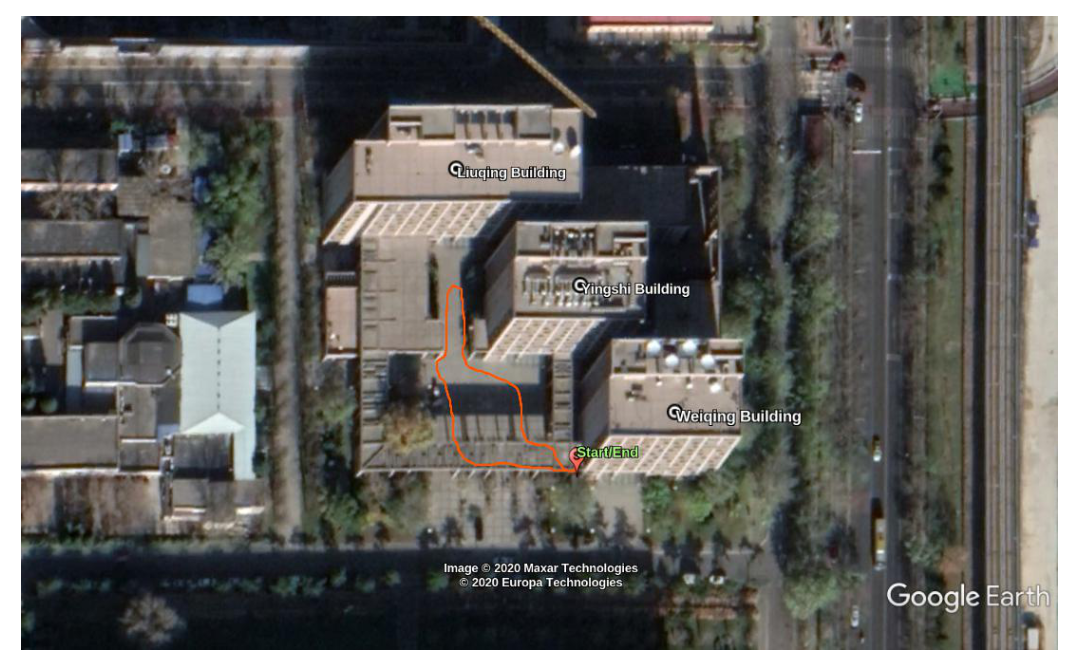
采集路线:从伟清楼出发,环绕附近建筑一周后返回原点:
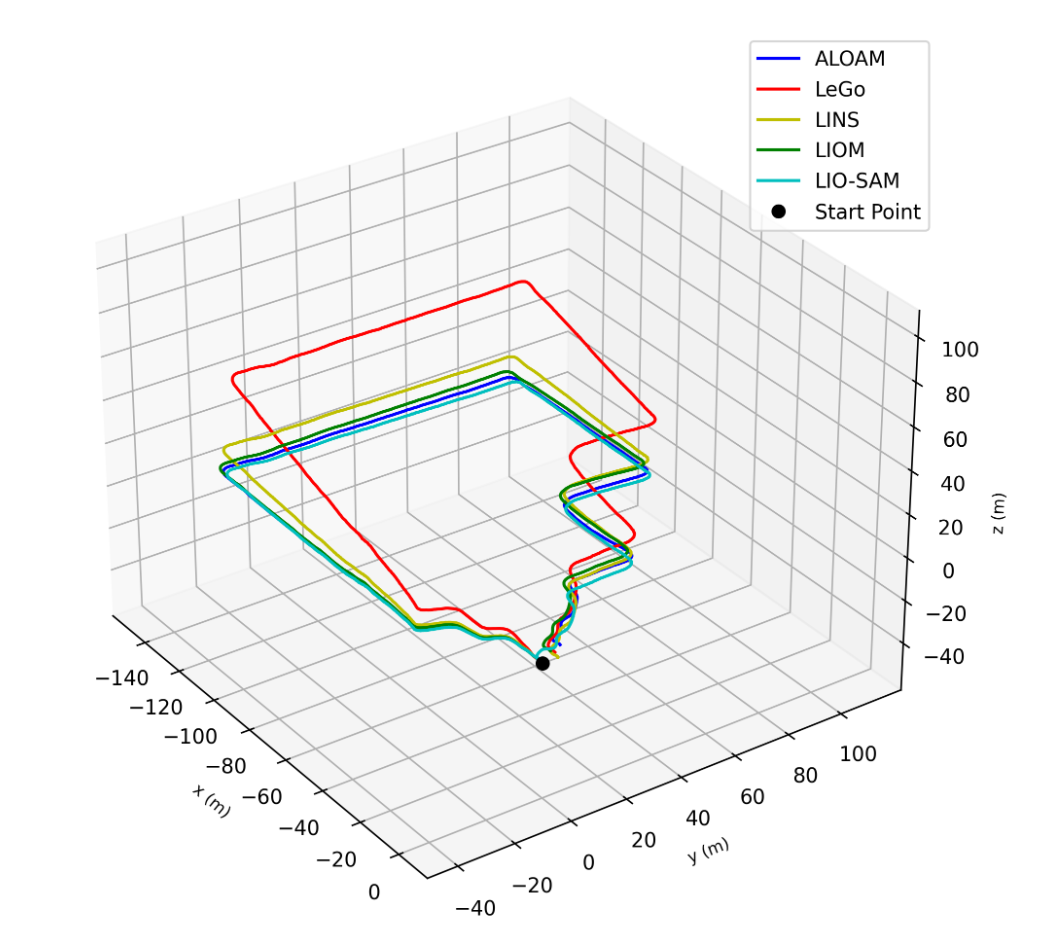
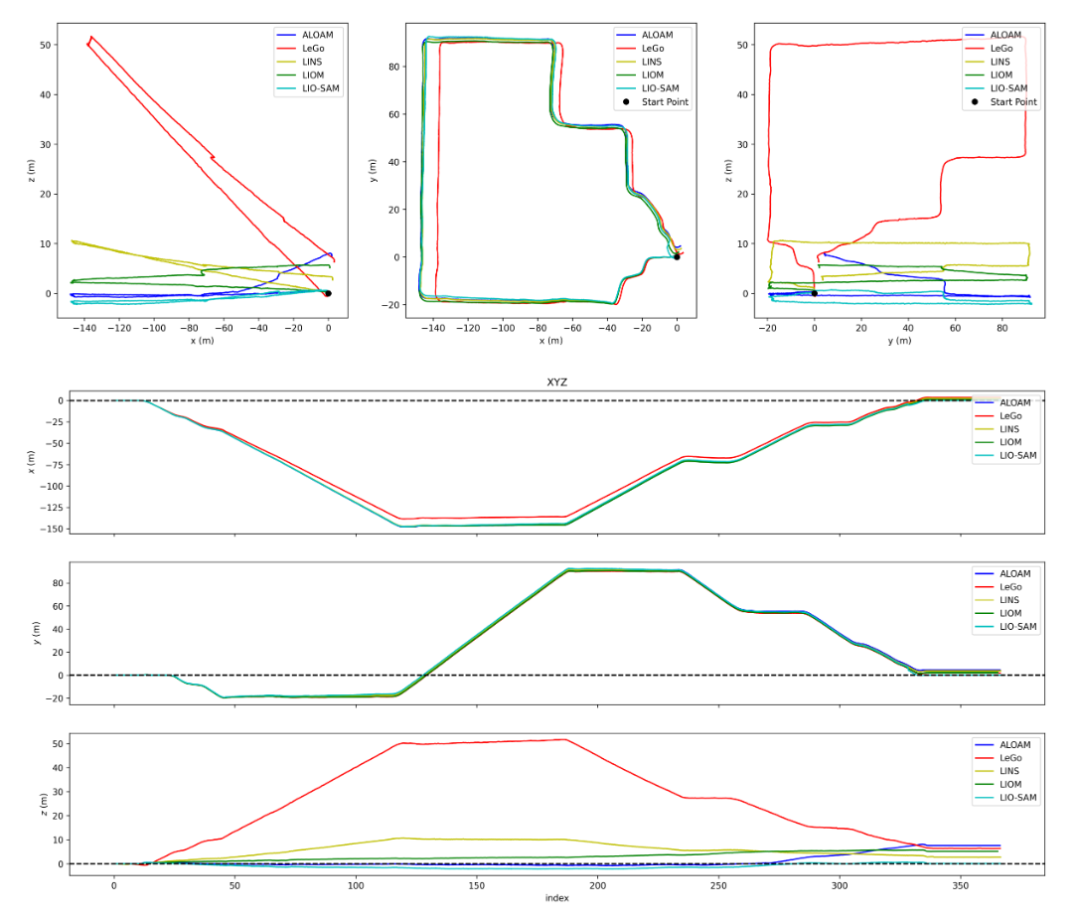
定位结果:
建图结果:
结论:
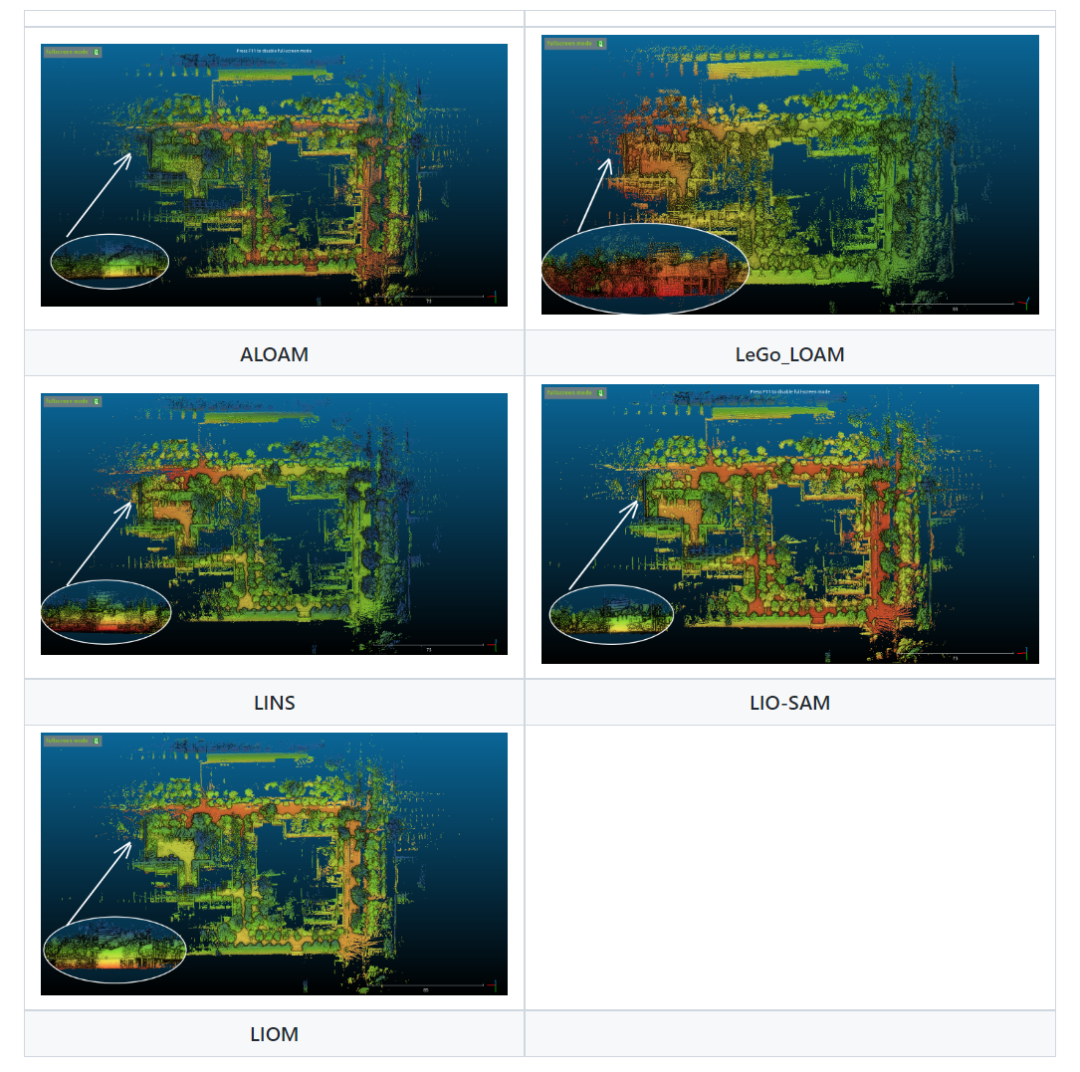
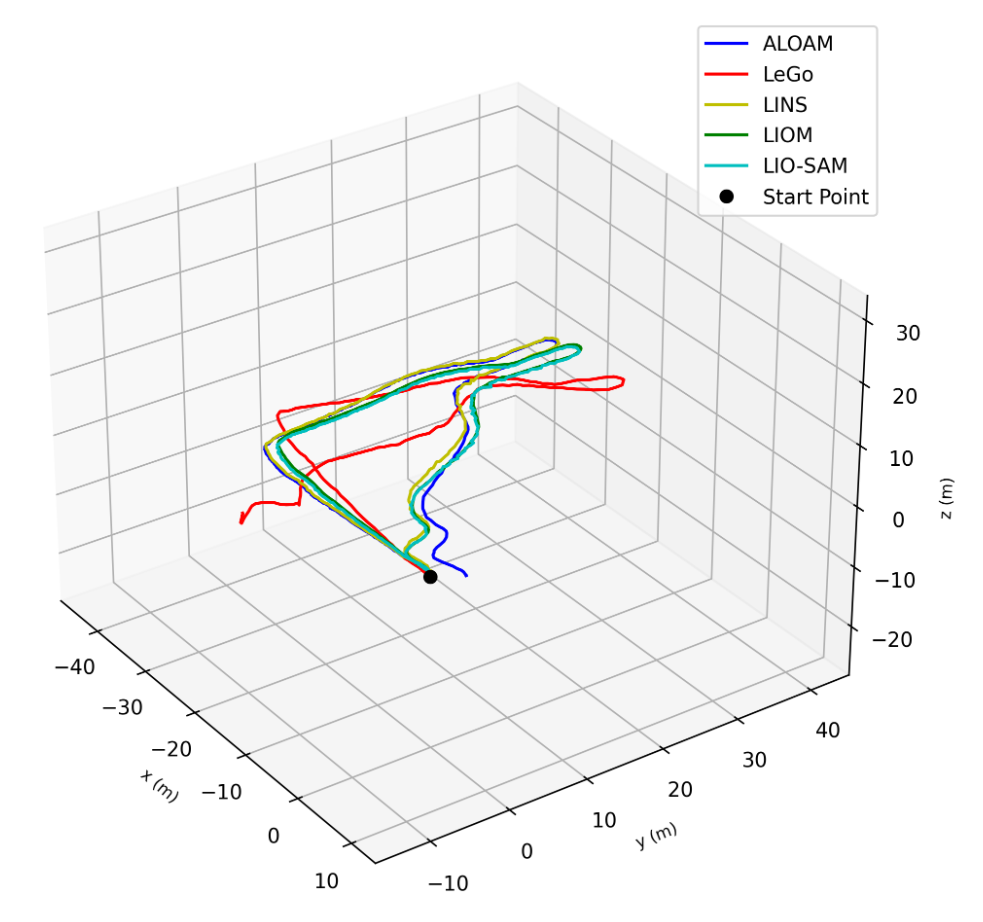
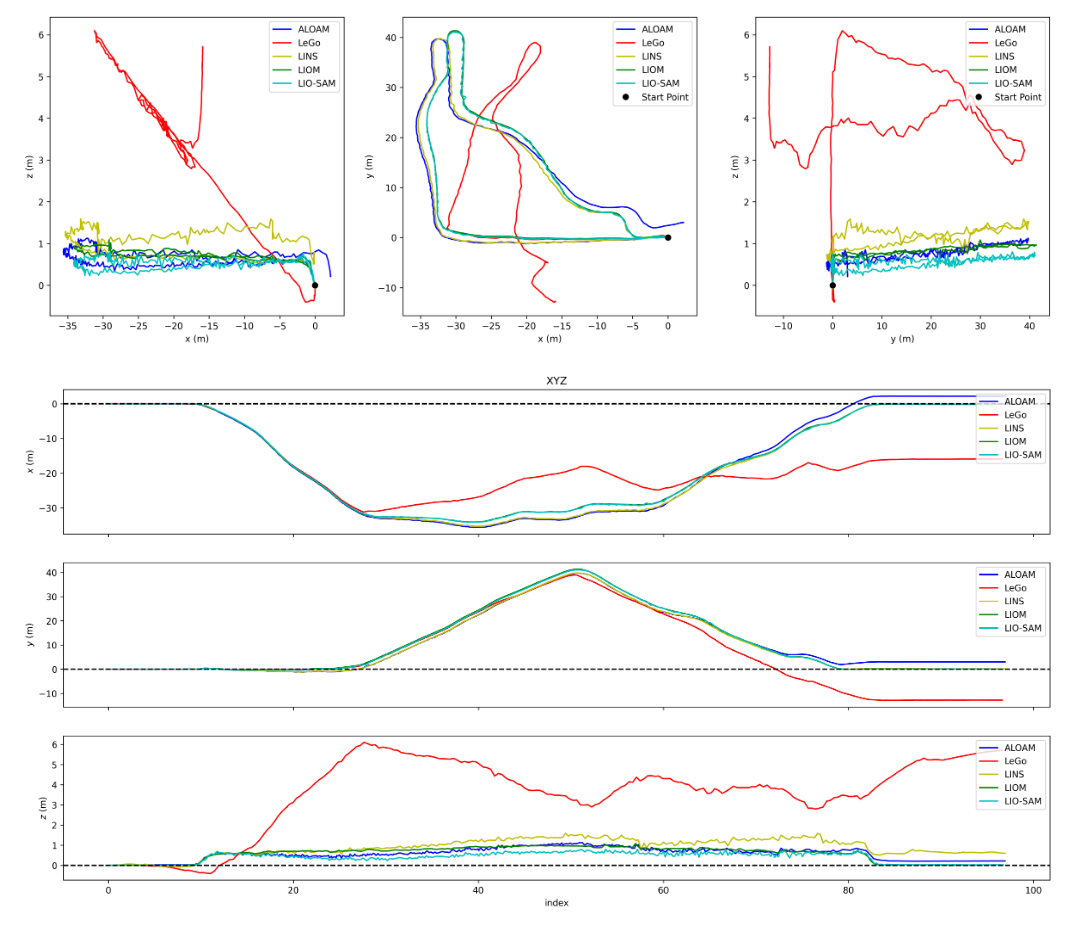
从定位结果来看,IMU紧耦合且存在回环检测的LIO-SAM成功地闭合了回环,其他方案都发生了明显漂移,其中,LeGo-LOAM在z方向产生了相当离谱的估计,这是由于点云中地面点较少,不能很好地约束住z方向,而使用了IMU紧耦合的另外两种LINS,LIOM较之ALOAM漂移较少,证明高频IMU起到了一定的约束作用。
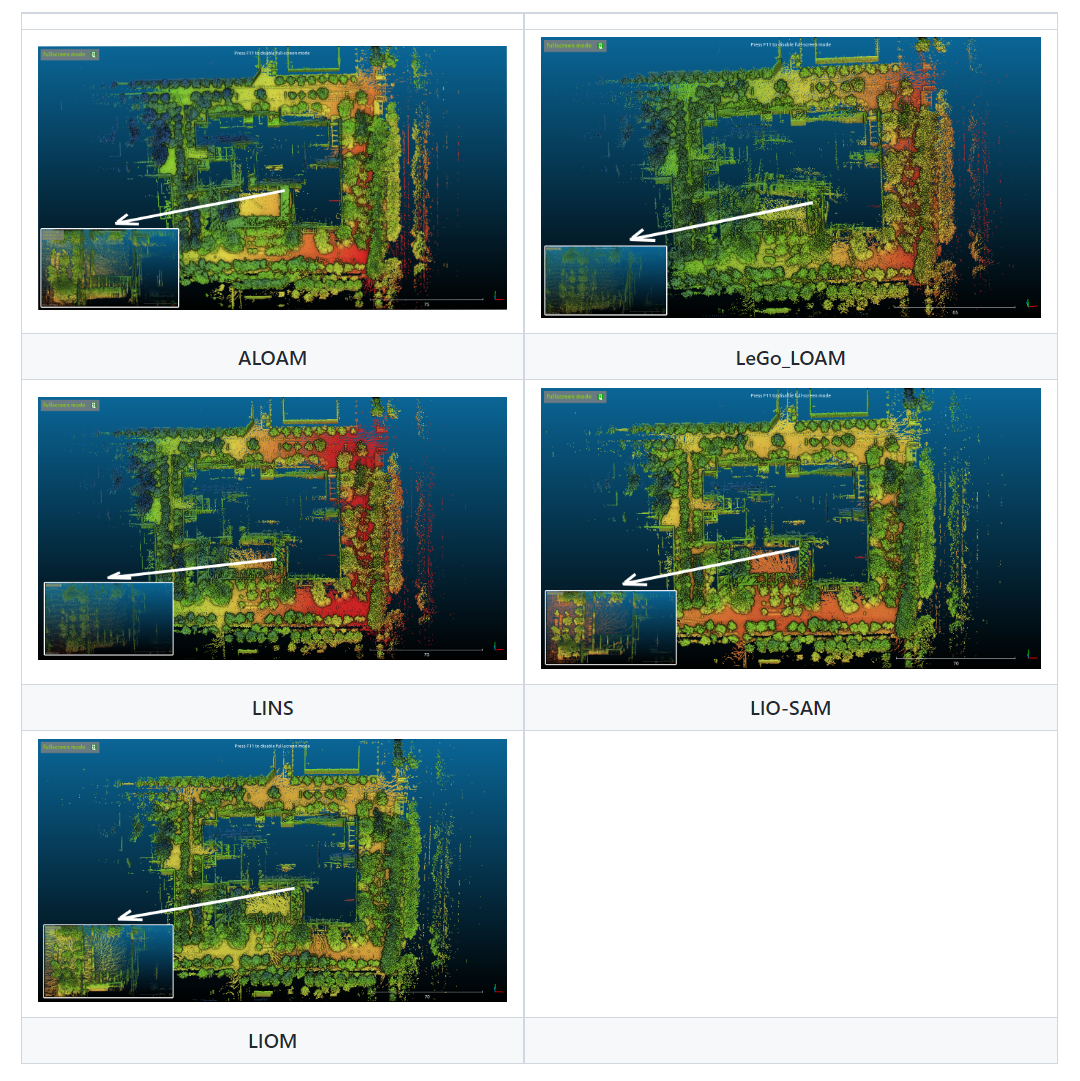
从建图结果来看,LIO-SAM由于闭合了回环,建立了全局一致的地图。而其他方案建立的地图中则可以看出明显的漂移,例如图中左下角显示了起点处地图的侧视图,可以看到除LIO-SAM外,其他方案的地图都出现明显的分层现象,这就是z方向漂移的结果。
4. outdoor4
采集路线:从伟清楼出发,与outdoor3方向相反地环绕附近建筑一周后返回原点:
定位结果:
建图结果:
结论:
从定位结果来看,只有LIO-SAM很好地闭合了回环。LeGo-LOAM再次发生了退化,估计效果不佳,而LINS和LIOM在z方向产生了明显漂移,ALOAM在y和z方向都产生了明显漂移,说明IMU还是起到了一定的约束作用。
从建图结果来看,LIO-SAM得到了全局一致的地图,而其他方法由于漂移建图效果不太理想,例如图中的左下部分显示了起点处地图的俯视图,可以看到除LIO-SAM外都存在分层现象,这是z方向漂移的结果,而ALOAM和LeGo-LOAM还可以看出明显的平行相似结构(如柱子和右侧墙壁),这是y方向漂移的结果。
5. aggressive
采集路线:从伟清楼出发,在伟清楼,英士楼和刘卿楼围城的空地上行走,途中伴随有跑步后骤停,猛烈转弯等剧烈动作,最终回到原点:
定位结果:
建图结果:
结论:
从定位结果来看,LIO-SAM和LIOM很好地闭合了回环。LINS在z方向产生了明显漂移,ALOAM在y和z方向都产生了明显漂移,LeGo-LOAM则索性崩溃,这说明IMU还是起到了一定的约束作用。
从建图结果来看,采用了IMU紧耦合的三种方案LIO-SAM和LIOM和LINS得到的地图看起来都还不错,很难看出漂移或失真痕迹,而ALOAM和LeGo-LOAM的结果就相当糟糕了!
三.总结
各种方案的优缺点如下:
| 方案 | 优点 | 不足 |
|---|---|---|
| ALOAM | 1. 在几何特征丰富时比较稳定 |
1. 后期内存会出现爆炸,计算效率下降 2. 在几何特征较少时会产生明显漂移 |
| LeGo-LOAM |
1. 在地面点丰富时比较稳定 2. 轻量级 |
1. 在地面点缺乏时很容易崩溃 2. 得到的地图比较稀疏 |
| LINS | 1. 轻量级 |
1. z方向漂移明显 2. 得到的地图比较稀疏 3. 目前的版本要求Lidar与IMU体坐标系的xy平面平行,不接受自己提供的外參 |
| LIO-SAM |
1. 存在回环检测,能较好地闭合回环 2. 稳定性强 3. Demo看起来比较舒服 |
1. 在几何特征丰富的情况下可能不如ALOAM |
| LIOM | 1. 存在重力加速度的校正和IMU初始状态估计 |
1. 稳定性不好,有时性能好,有时又不行,可能与其初始化环节的性能有关 2. 内存占用大,时间性能较差 |
在进行IMU校正后,融合高频IMU确实能够提升SLAM性能,尤其是在几何特征缺乏或者剧烈运动的情况下。
LIO-SAM在定位和建图方面做的都不错,比较建议使用。
编辑:黄飞
-
探讨目前主流3D激光SLAM算法方案2023-10-23 2885
-
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-1282018-07-26 6091
-
视觉SLAM特征点法与直接法对比分析2020-06-02 2596
-
浩辰3D软件入门教程:如何比较3D模型2020-12-15 2640
-
自制低成本3D激光扫描测距仪(3D激光雷达)2021-03-04 7007
-
激光SLAM和视觉VSLAM的分析比较2021-11-10 5335
-
小型PLC对比分析2012-04-27 1061
-
3D激光雷达SLAM技术的应用趋势2022-03-21 6534
-
基于自动驾驶汽车记录的3D激光扫描的SLAM闭环问题讨论2022-10-27 2005
-
【3D形状分析利器】3D扫描应用案例集分享2023-02-01 2211
-
基于LeGo-LOAM框架的3D激光SLAM技术2023-06-29 1583
-
中强光智能3D激光SLAM无人叉车技术特点详解2023-11-10 1918
-
什么是激光雷达3D SLAM技术?2023-11-25 2542
-
激光锡焊与回流焊接对焊点影响的对比分析2024-08-23 1813
-
什么是激光雷达 3D SLAM技术?2025-12-02 928
全部0条评论

快来发表一下你的评论吧 !
