

使用STM32任意定时器生成动态波形
描述
别问什么高级不高级了,输出个波形而已,没有啥难的。只是给出了一些细节,比如你想输出自己定制的一些波形,该怎么办?
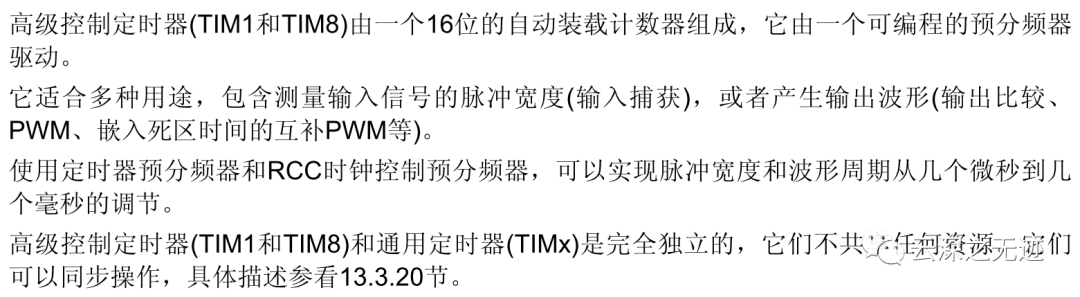
这里就是使用了TIM1
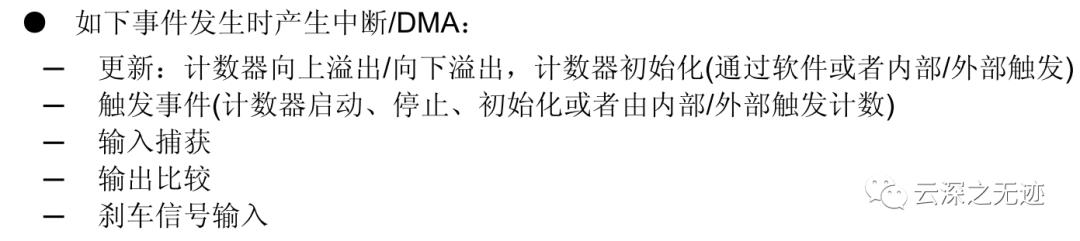
可以在各种情况下输出中断

在NVIC里面可以看到
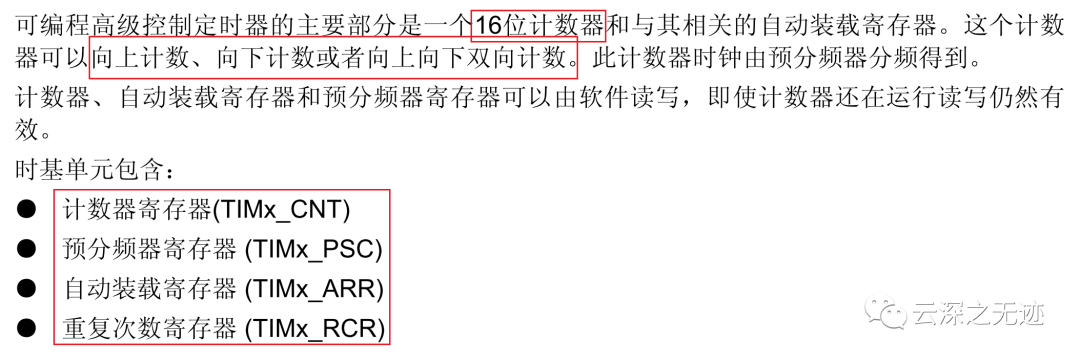
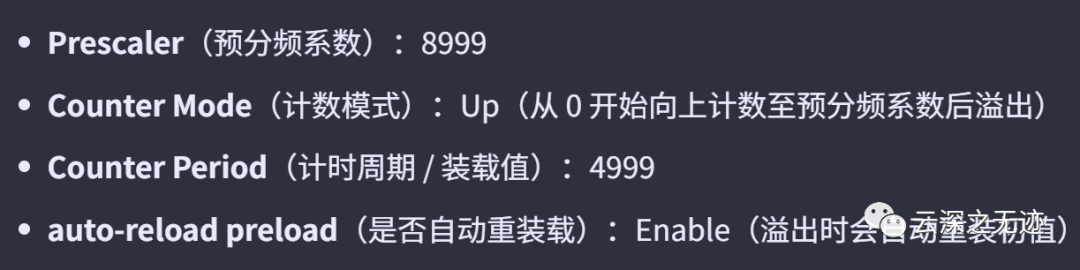
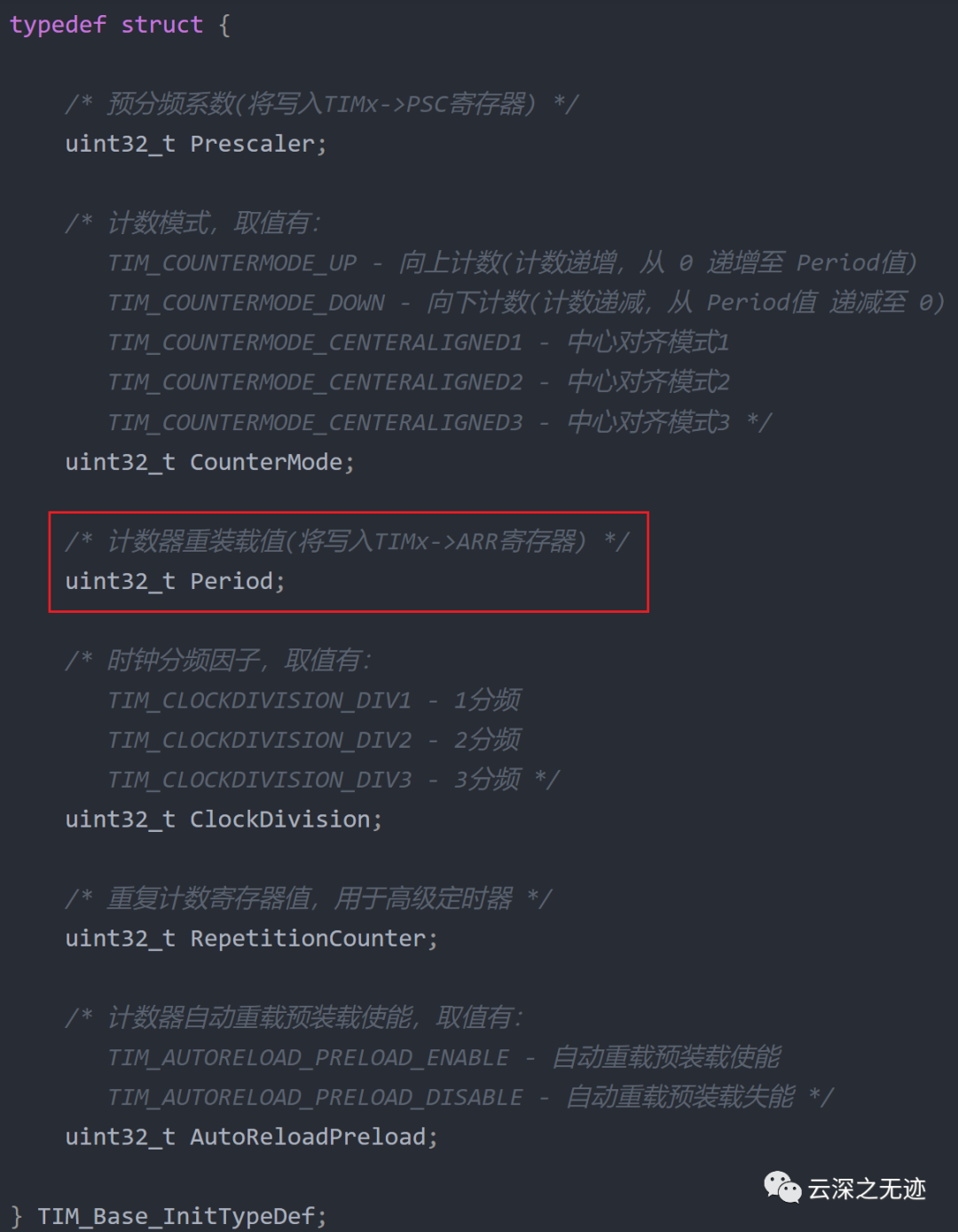
里面包含的寄存器就是这几个
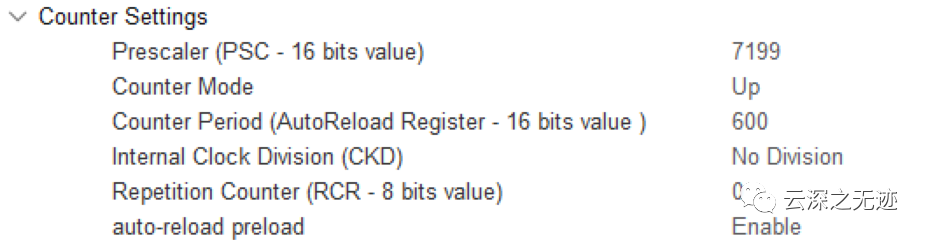
可以按照72MHz来设置
STM32定时器之ARR,PSC俩兄弟,具体的可以看我以前的文章。
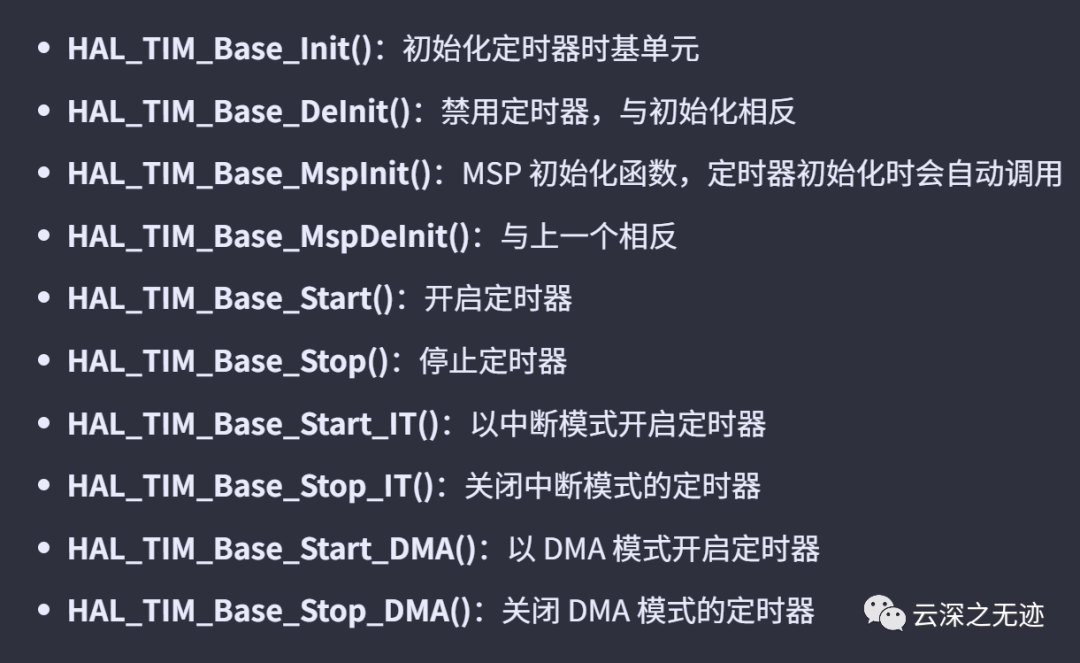
关于定时器的函数,开启定时器需要自己写
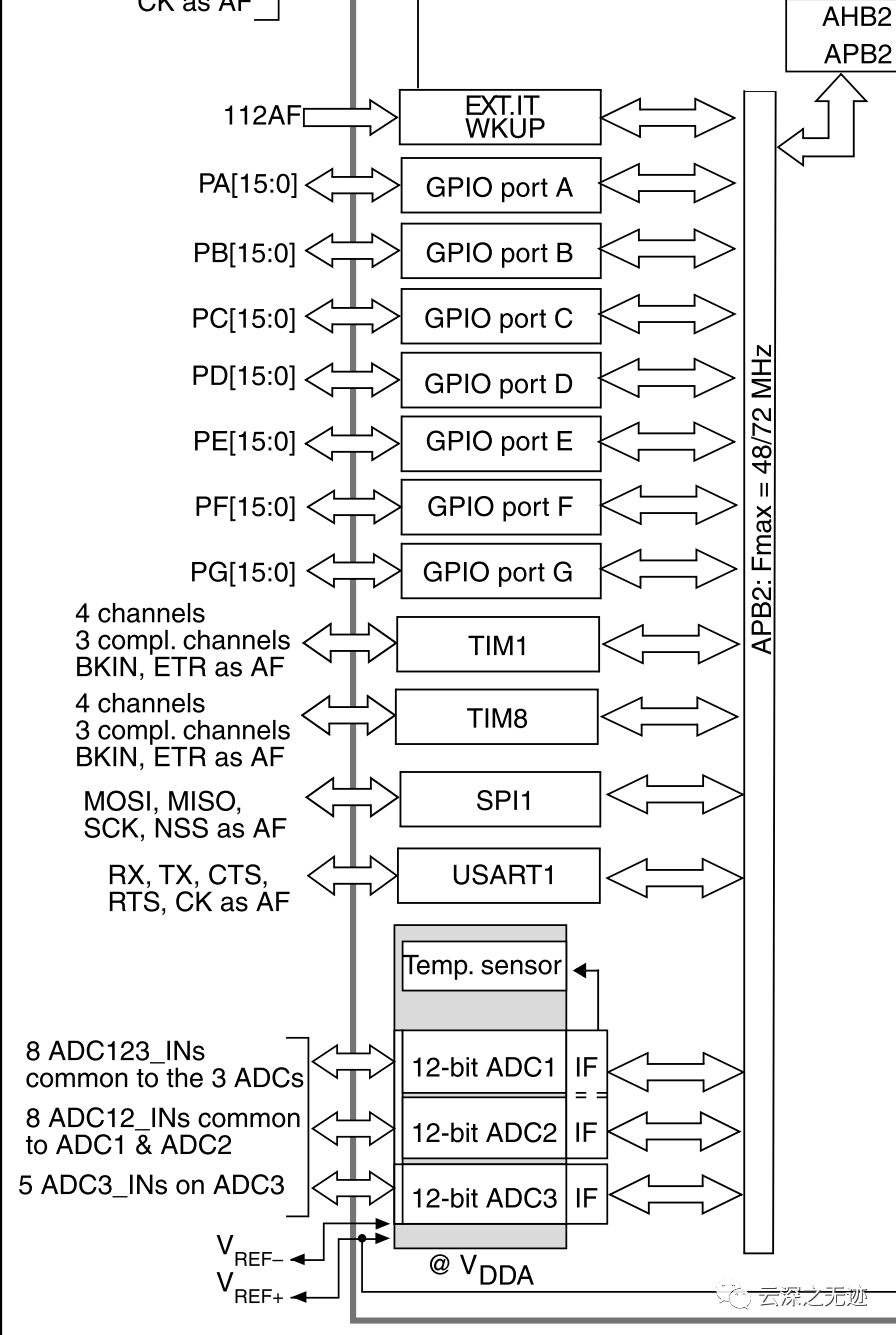
TIM1是挂在APB2上面
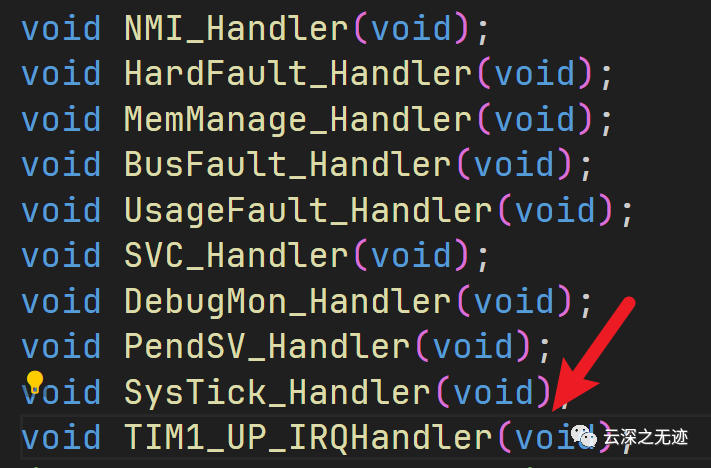
在中断的文件里面最后显示up这个中断
update
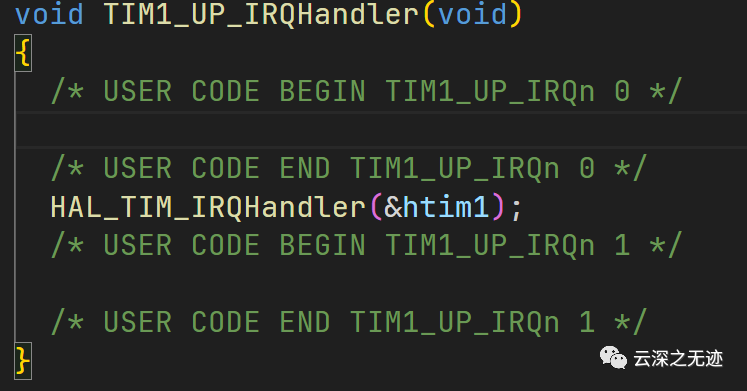
表面是UP,但其实要送下下个函数里面看看到底是谁的中断
这个函数的具体作用是判断中断是否正常,然后判断产生的是哪一类定时器中断(溢出中断/PWM中断.....),然后进入相应的中断回调函数
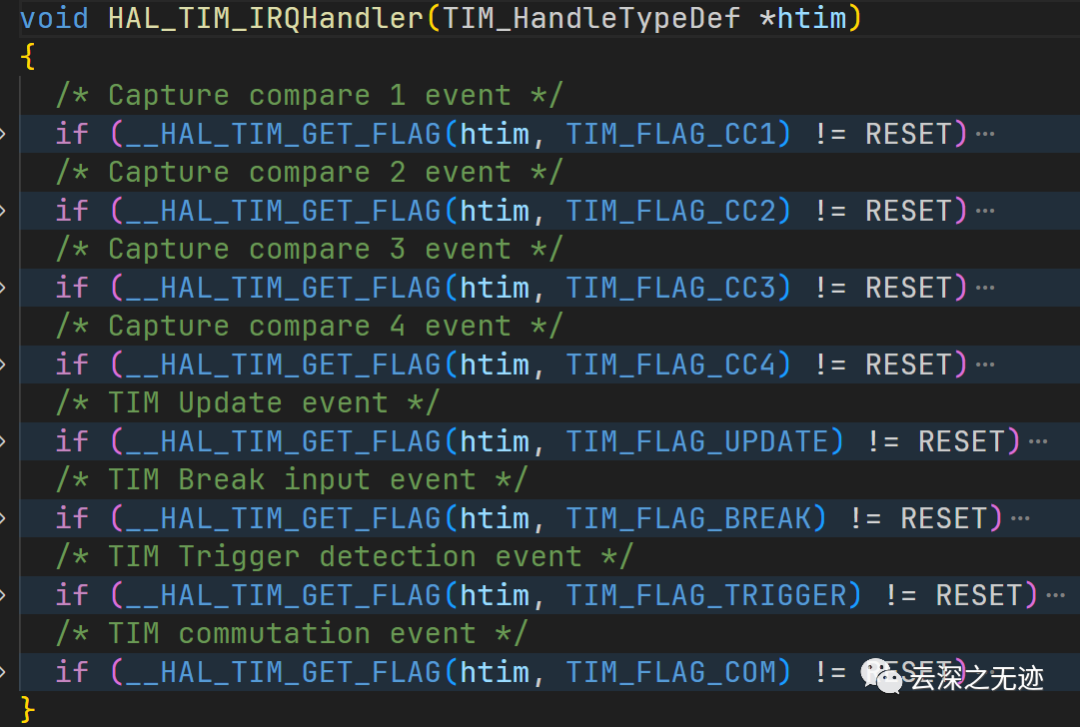
长这样
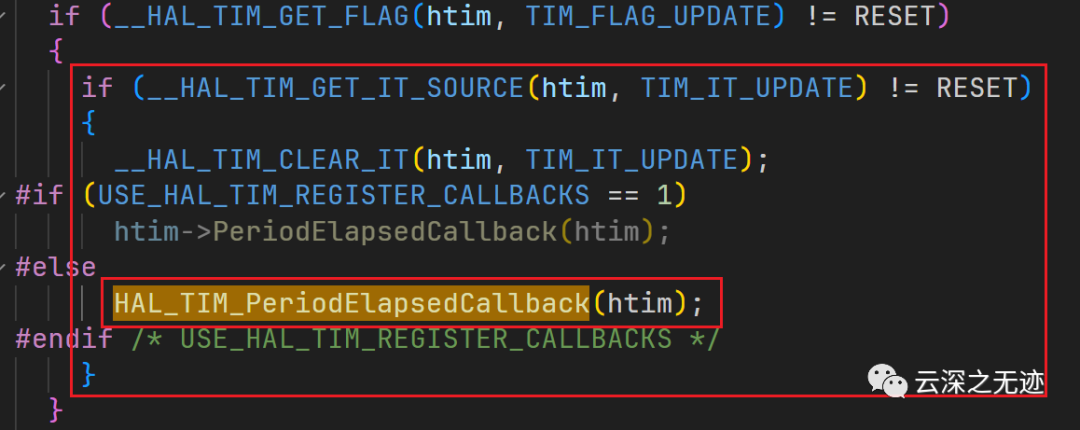
找到触发的中断,然后就是触发回调函数
就是我搞黄了这个
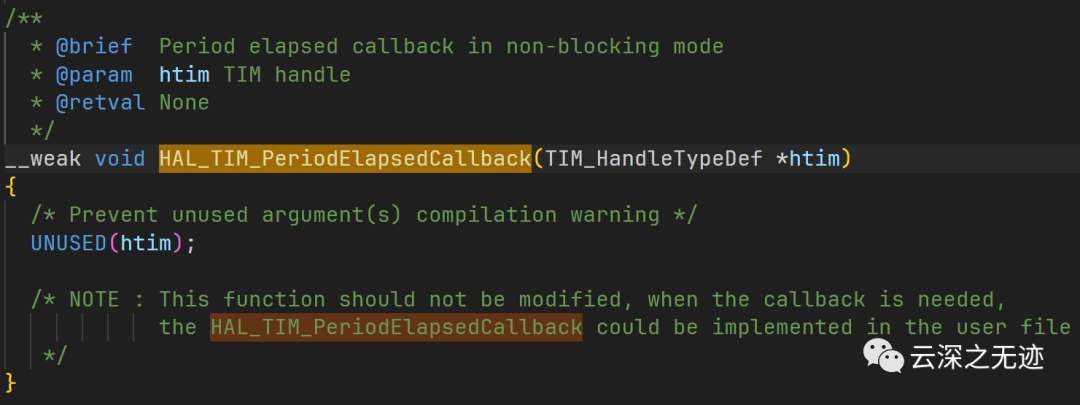
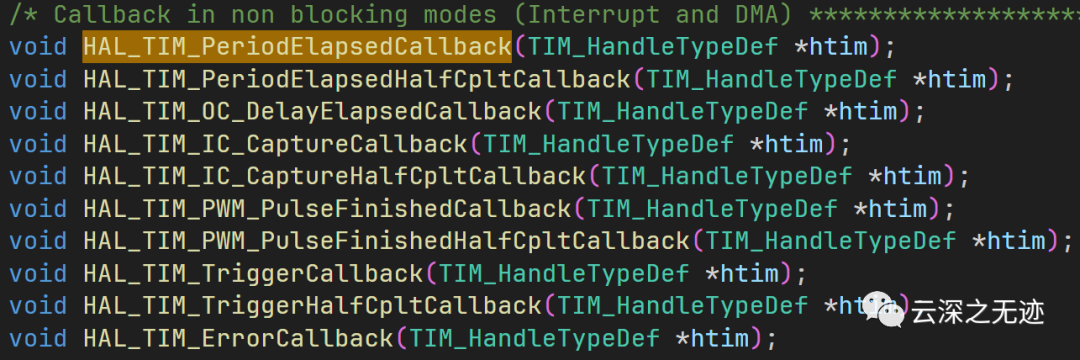
弱定义的回调,要在这里自己去写逻辑

注意要打开定时器让其工作,假如是中断打开要开IT的函数
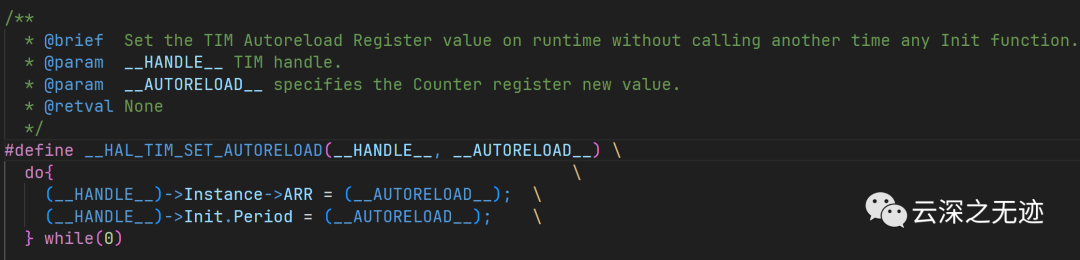
这个可以重载定时器的值
显示的__HAL_TIM_SET_AUTORELOAD宏定义是一个常见的用于设置STM32时钟自动重载寄存器(ARR)的宏。它可以同时更新TIM_HandleTypeDef结构体中的Init.Period字段。
这个宏用于动态更改时钟周期。如果想在中断后更改时钟周期为10ms,可以使用:
__HAL_TIM_SET_AUTORELOAD(&htim1, 100); // 设置下一个周期为10ms
修改的是定时器结构体里面的数据
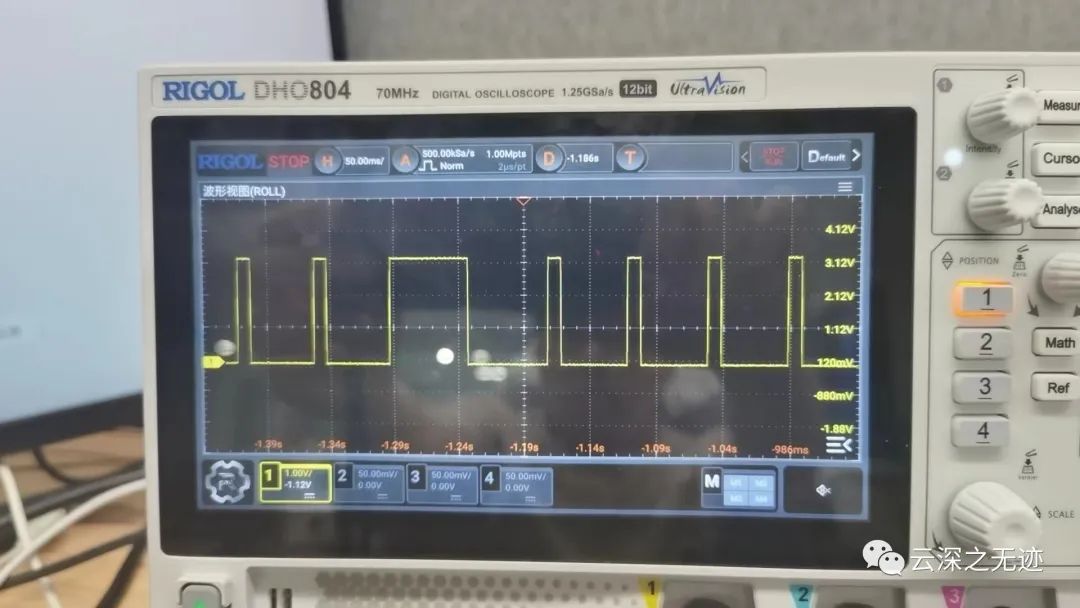
原理就是你知道1s数一下,你就知道数10下就到时间了,也就是10次中断,知道了数10s后,做些什么。。当定时器到达预设的周期,它将触发一个中断,然后你在中断服务程序里面切换GPIO的状态。
在运行时改变定时器的ARR(Auto-Reload Register)值在STM32(以及其他许多微控制器)中是一种常见的做法,用于动态地改变定时器周期或者波形的参数。 这样做的几个主要用途和意义如下: 动态波形调整:可以在运行时改变PWM或者其他类型波形的频率或者占空比。 任务调度:如果使用定时器进行某种形式的多任务调度或者时间切片,动态地改变ARR值可以使你更灵活地控制任务的执行。 事件触发:通过改变ARR值,可以在特定的时刻或者在某个事件发生后触发定时器中断。 精确计时:在需要非常精确控制时间的应用场合(例如,高精度测量或者通信协议),动态地改变ARR值可以在运行时微调定时器行为。 节能:在一些低功耗应用中,可以通过动态调整ARR值来改变微控制器的工作周期,以此来降低功耗。 模式切换:在复杂的系统中,你可能需要定时器在不同的操作模式之间切换。动态地改变ARR值使得这种切换成为可能。 应对不确定性:在某些场合,事先可能不知道定时器需要运行多长时间。动态地设置ARR值允许程序在运行时根据实际需要来配置定时器。 波形由多个高低电平组成,每个电平的持续时间都是通过ARR值来设置的。 这里主要是定时器周期的动态改变。
对定时器周期公式的理解:
T=(arr+1)*(PSC+1)/Tck 其中TCK为时钟频率,PSC为时钟预分频系数,arr为自动重装载值。
f=Tck/(psc+1)*(arr+1)
Tck/(psc+1)即为时钟频率,1/f为机器周期,乘以(arr+1)即可得出定时器周期。
也就是说这个周期,就是你定的时间,到了什么时间干什么事情的时间。设置好以后,下一次中断是什么时候,是某某时间,也就是你中断出场的时候。

if (htim->Instance == TIM1): 这个检查用于确定哪个定时器触发了这个回调。因为你可能有多个定时器在你的程序中,这个检查确保只有TIM1的事件会执行下面的代码。
这个时候写一下代码,可以把要生成的东西设置一个全局的变量,一开始为0,开始运行,比如你现在是高电平,接着你就要设置下次的触发时间,此时是高电平,下次是什么时候?自己数吧
其实此时对于使用定时器生成波形来讲,那就OK了,在while里面都没有东西。
while (1)
{
if (some_condition)
{
// 执行某些动作
}
}
检查变量干什么事情
while (1)
{
// 低优先级任务
}
紧急的在回调,剩下的就在这里了
一般我们都是生成方波为主,来看看方波的优点。
简单性和易于生成
方波是最简单、最易于生成和分析的波形之一。只需要一个简单的数字逻辑电路即可生成方波。
时间域和频率域的特性
方波包含了多个奇次谐波,这一点在频谱分析和信号处理中可能是有用的。
适用于数字和逻辑应用
方波是数字电子学和逻辑电路的基础,用于表示二进制信息(0和1)。
高能量效率
由于方波在其周期内只有两个状态(通常是高和低),因此它能更有效地传输能量。
易于检测和触发
方波的尖锐边缘使得它很容易被用作触发信号,在定时和同步应用中很有用。
易于调制和解调
方波通常更容易用于某些类型的数字调制方案,如频率偏移键控(FSK)和相位偏移键控(PSK)。
适用于脉冲宽度调制(PWM)
方波是PWM(脉冲宽度调制)的基础,这是一种常用于控制电机、LED亮度和其他应用的技术。
高信噪比
在某些应用中,例如数字通信,方波由于其决定性的高和低状态通常有更高的信噪比。
那我们就来把这个生成的代码框架完善一下。
使用一个简单的状态机逻辑,以及一个数组来保存波形的各个部分(高电平/低电平以及持续时间)。
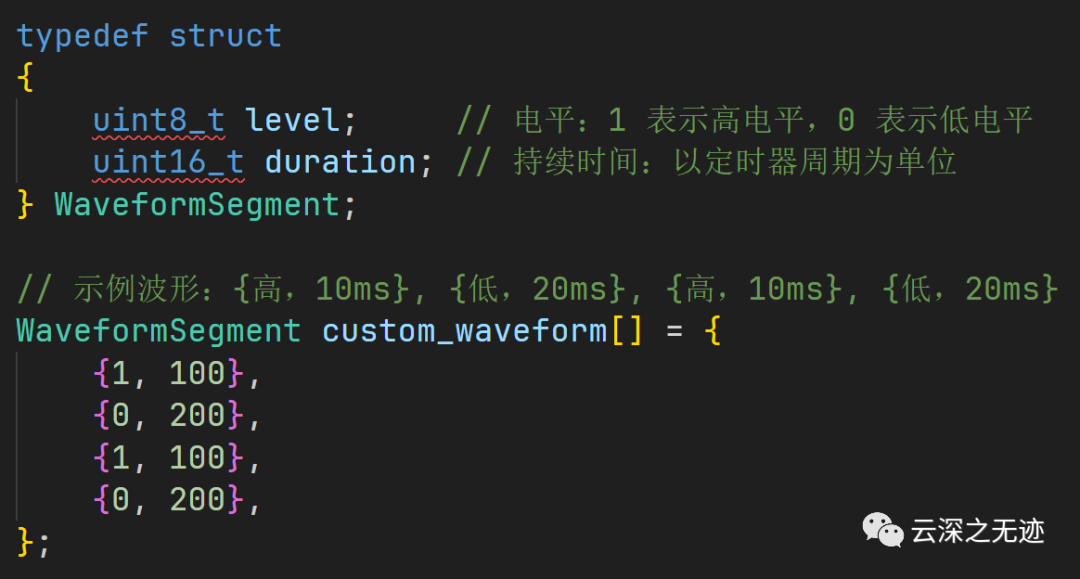
可以考虑设计成这样,我们感兴趣是就是高低电平和相应的时间长度

使用 #define WAVEFORM_SEGMENTS (sizeof(custom_waveform) / sizeof(WaveformSegment)) 是一种方便的方式来计算波形分段数组的元素数量。
在这种情况下,custom_waveform 应该是一个 WaveformSegment 类型的数组。这种方法的优点是它在编译时完成计算,不需要运行时计算。
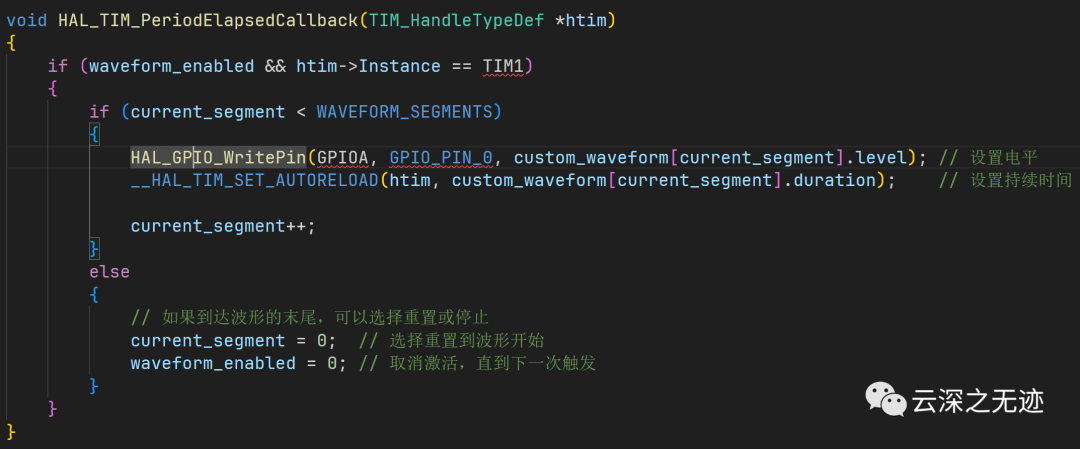
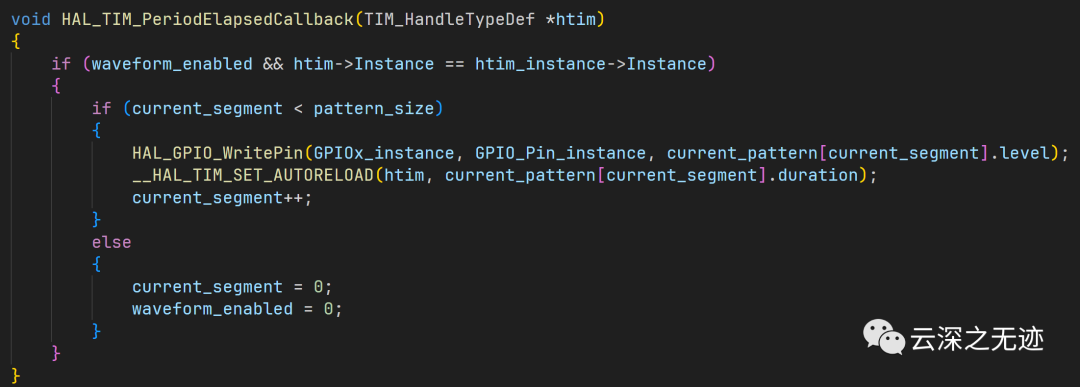
在这里,waveform_enabled 是一个标志,用于确定是否应该生成波形。这个标志可能会在其他代码段,比如一个按键中断服务例程中被设置。 current_segment 是一个静态局部变量,用于跟踪当前波形的哪一部分(或“段”)正在生成。每当这个回调函数被触发时,它会: 检查 waveform_enabled 是否被设置以及是否使用了正确的定时器实例。 如果是,则进一步检查 current_segment 是否小于波形分段数组的长度(由 WAVEFORM_SEGMENTS 定义)。 如果也是,则根据 custom_waveform[current_segment] 的内容设置GPIO的电平并更新定时器的自动重载值。 这种方式是非常灵活和可扩展的。可以很容易地更改 custom_waveform 数组来生成不同的波形,或者动态地更改它来适应不同的应用场景。 由于使用了静态局部变量 current_segment,这个函数在多线程环境下可能不是线程安全的。如果在其他地方也访问或修改了这些变量,可能需要添加额外的同步机制。 此外,如果波形生成结束后需要执行其他操作(如通知其他任务或更改硬件状态),则可以在代码的相应部分添加这些操作。在这里,一旦波形生成结束,waveform_enabled 被设置为0,以停止波形的进一步生成,直到下一次明确的触发。
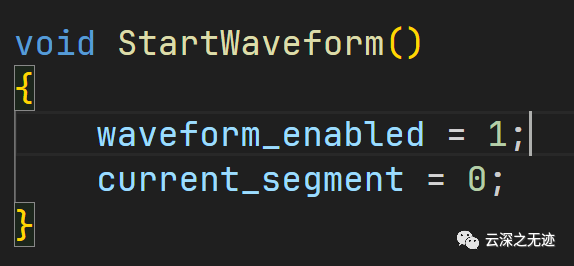
开启输出
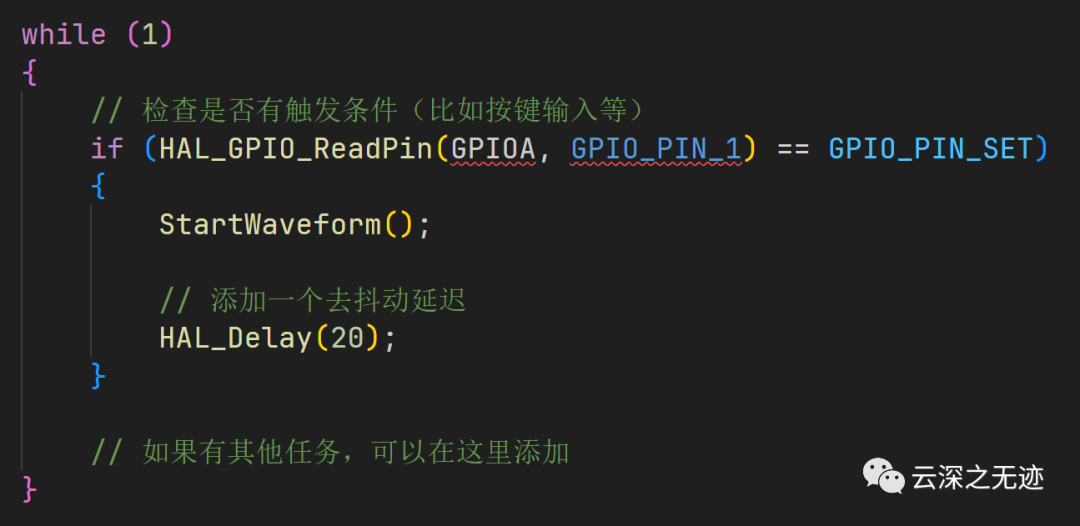
然后这样使用
对于一个大的程序框架来说,它还是不够优雅,让我来继续的注入能量、
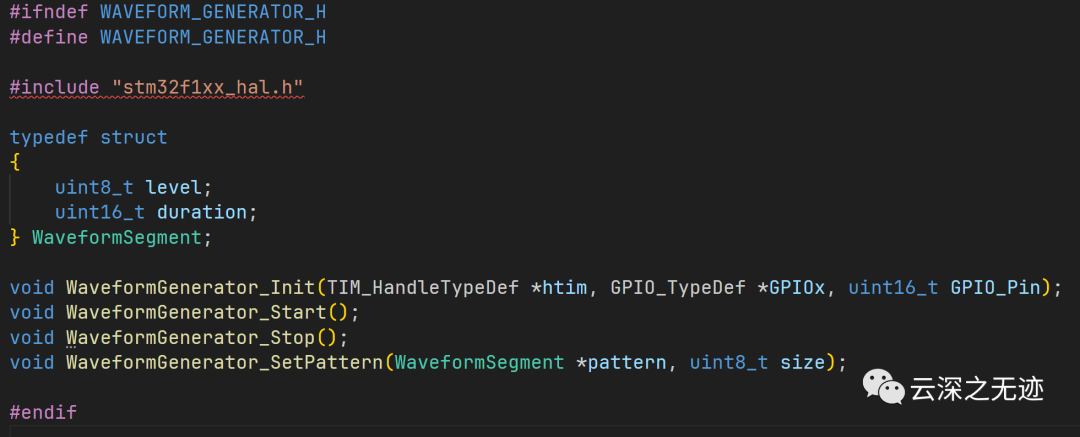
首先写一个头文件
这段代码定义了一些静态变量,这些变量在整个C文件(或作用域)内都是可用的,但不能在其他C文件中访问。这些变量通常用于在不同的函数之间共享状态或数据。 htim_instance: 用于存储与波形生成相关联的TIM_HandleTypeDef结构的指针。 GPIOx_instance: 用于存储与波形生成相关联的GPIO端口的指针。 GPIO_Pin_instance: 用于存储与波形生成相关联的GPIO端口的引脚号。 current_pattern: 一个指向波形段(WaveformSegment)数组的指针,用于表示当前的波形模式。 pattern_size: 用于存储当前波形模式(即current_pattern数组)的大小。 current_segment: 一个用于跟踪当前波形段的索引的变量。 waveform_enabled: 一个标志,用于指示是否应该生成波形。 这些变量主要用于在回调函数(如HAL_TIM_PeriodElapsedCallback)和可能的其他设置或控制函数之间共享状态。

可以这样使用,然后,在HAL_TIM_PeriodElapsedCallback中,你就可以使用这些变量来实现波形的生成,而不需要硬编码或传递大量参数。
回调是最终的执行家,跑不了的
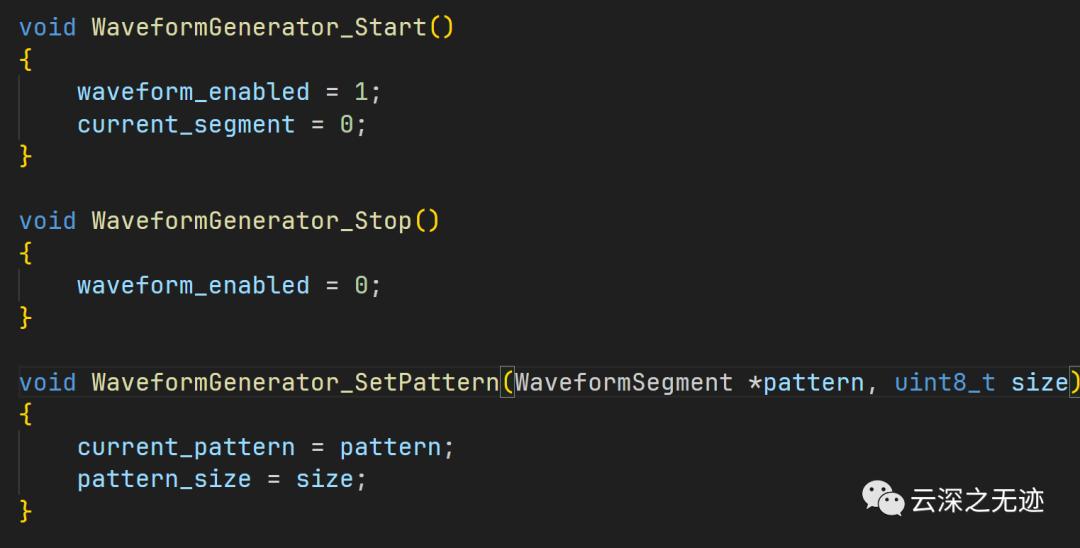
别的一些函数
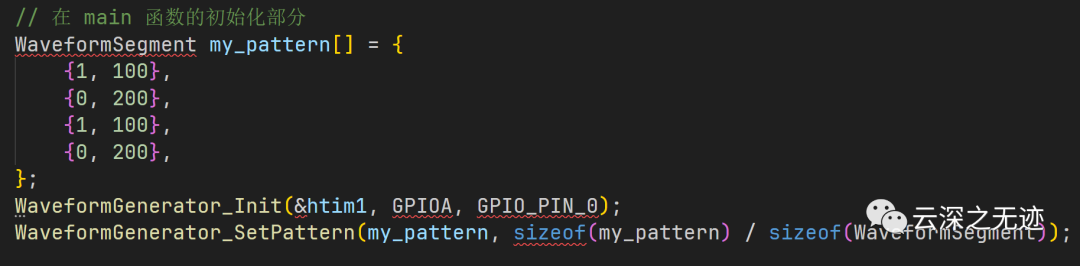
使用的时候就生成一个波形的参数包
然后开启和关闭就好了
我后面会写个库,扔Github上面。
审核编辑:汤梓红
-
任意波形发生器中波形生成方法2024-05-29 2461
-
AWG510任意波形发生器参数AWG5102023-07-12 995
-
STM32CubeMx入门教程(3):定时器的使用2023-07-11 7032
-
如何使用MAXQ微控制器上的定时器B生成PWM波形2023-02-20 1296
-
Tektronix 泰克AFG3102任意 波形发生器 收购+出售2022-03-02 561
-
⭐❤️STM32之玩转定时器TIMX❤️⭐2021-12-28 885
-
STM32——高级定时器、通用定时器、基本定时器的区别2021-11-26 3786
-
STM32定时器-基本定时器2021-11-23 1818
-
回收泰克AWG5202任意波形发生器2020-06-29 571
-
评估Si5342任意频率,任意输出,抖动衰减时钟倍频器SI5342-EVB2019-02-27 3609
-
求购AWG510、AWG520任意波形发生器2018-07-03 1173
-
泰克推出AFG2021任意波形/函数产生器2012-08-14 1645
-
基于CV1任意波形发生器的整体设计2009-01-11 1122
全部0条评论

快来发表一下你的评论吧 !
