

特斯拉的FSD芯片HW3和HW4的区别
汽车电子
2451人已加入
描述
特斯拉的Autopilot的核心是计算核心,HW3的SoC 芯片是核心,而HW4 则逐步被人所揭示,我们通过HW3的回顾来等待下HW4的破解。
● HW3 和设计
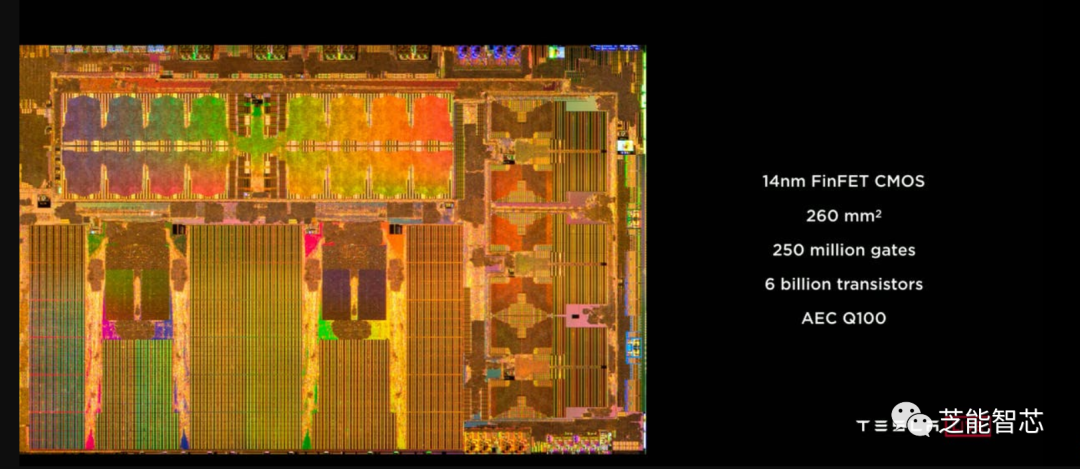
HW3是特斯拉的自动驾驶仪和全自动驾驶(FSD)计算核心,包括了冗余系统。HW3的芯片由两块CPU组成,配备了高性能的LPDDR4 RAM。这些芯片处理来自各种传感器的数据,特别是相机,支持自动驾驶功能。
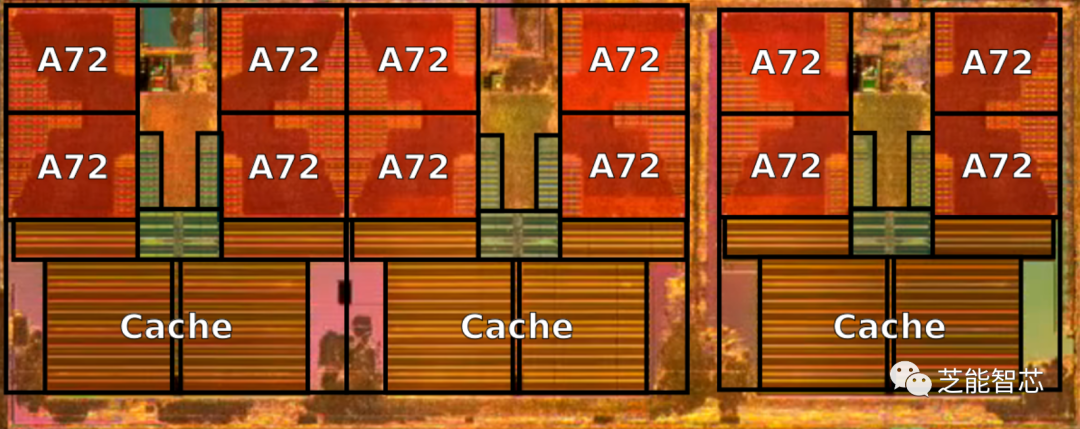
SoC芯片采用三星14nm工艺,面积为260平方毫米(60亿个晶体管)。
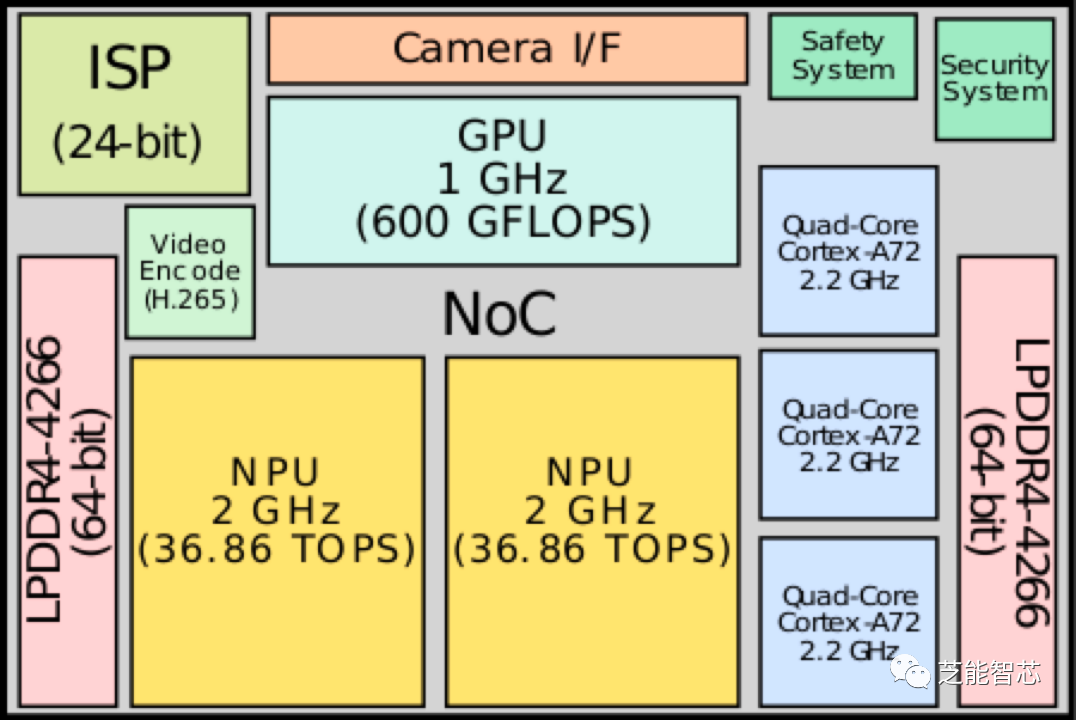
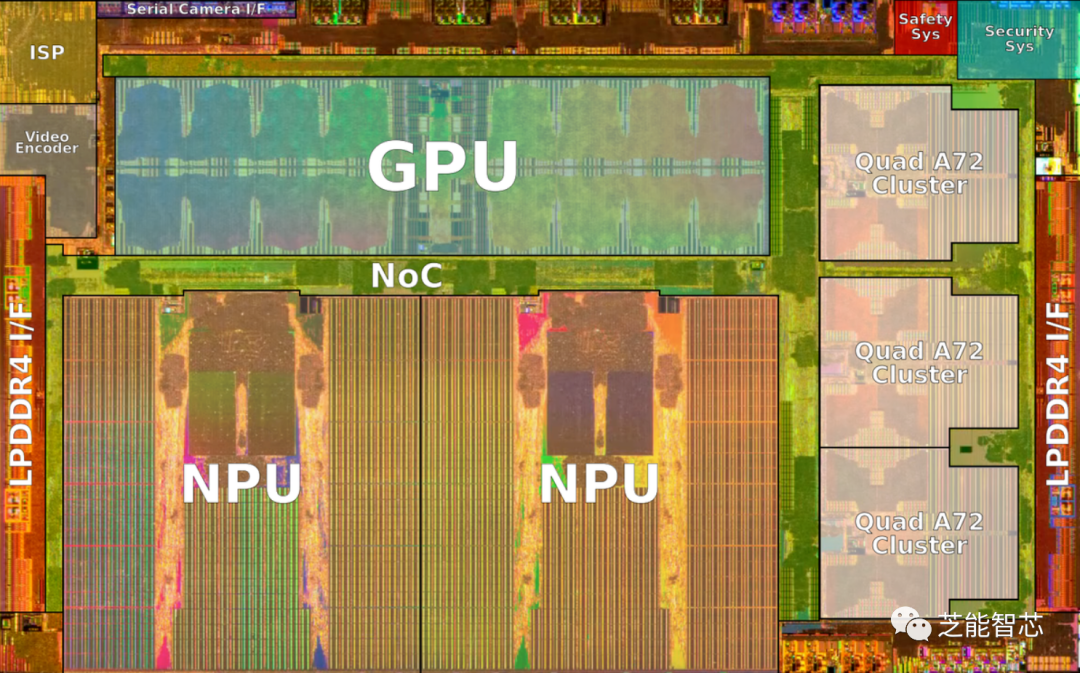
集成了:
3 个四核Cortex-A72集群(12个工作频率为2.2GHz的Cortex-A72核)
1个工作频率为2GHz的Mali G71 MP12 GPU
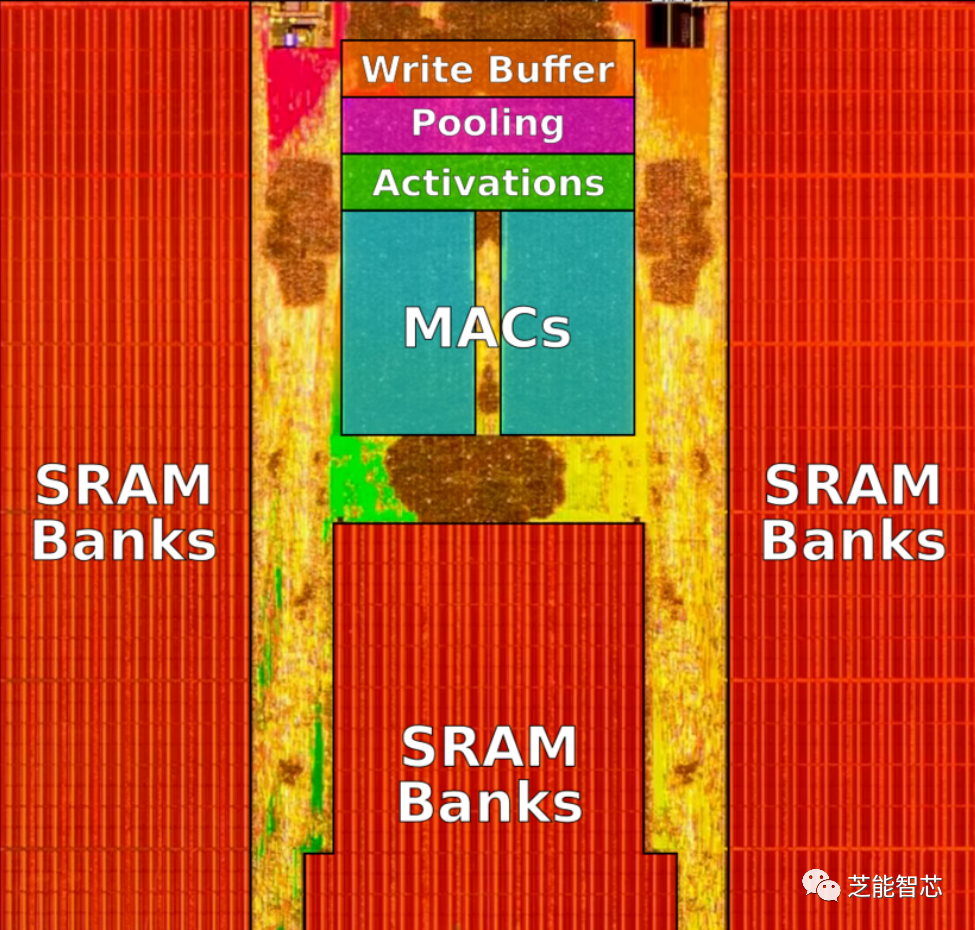
2个工作频率为2GHz的NPU
还有其他硬件加速器,同时支持单精度和双精度浮点运算
支持以2133MHz运行的128bitLPDDR4内存
● HW4的芯片进化
HW4的SOC芯片在HW3上进行迭代:
计算核心(CPU):三星Exynos IP,CPU频率2.35GHz、5个CPU集群(20个CPU核心)
NN的 AI加速器:3个神经网络 (NN)处理器、NN处理器频率2.2 Ghz,估50 TOPS的算力;
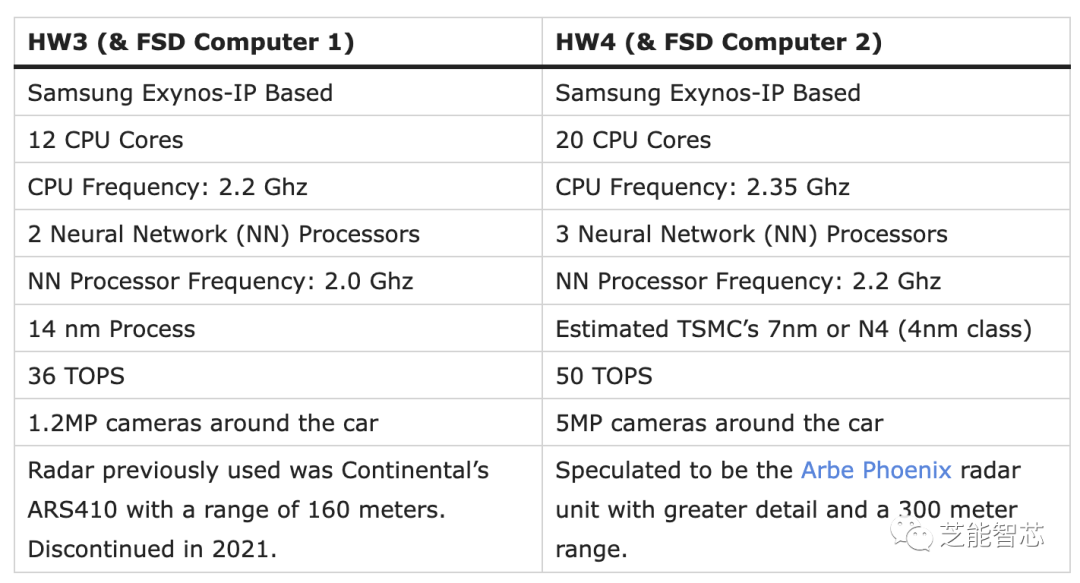
由于有传言HW5,在三星的4纳米节点上制造,将用于特斯拉的硬件5(HW 5.0)芯片,估计这个HW 4 可能算力提升太少了。
● 小结
随着算力的膨胀,特斯拉在FSD芯片层面的算力和经济性优势,还是被整体的芯片进步抹平了。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
2500 TOPS!特斯拉HW5智驾算力怪兽突击,国产VLA火速进化2025-06-20 9627
-
特斯拉:HW3若无法满足无人监督FSD,将免费升级至HW42024-10-24 5093
-
特斯拉HW3车型迎来FSD v12.5软件更新,自动驾驶体验再升级2024-08-23 3000
-
拆解特斯拉HW4.0的毫米波雷达主板2023-03-06 5579
-
特斯拉最新HW4.0用了哪些芯片?2023-03-01 8808
-
特斯拉的HW4.0内部拆解分析2023-02-19 6888
-
特斯拉芯片门事件2021-07-15 3780
-
特斯拉下一代硬件—HW4.0自动驾驶硬件即将推出2021-01-26 4677
-
博通与特斯拉联合研发的HW 4.0芯片,用于特斯拉的全自动驾驶计算机2020-08-20 5309
-
特斯拉陷入风波 车主吐槽对特斯拉是又爱又恨2020-03-09 2076
-
特斯拉欺骗消费者的事,并不是知道HW2.5和HW3.0的区别就行2020-03-08 9266
-
网曝国产Model 3虚标HW3.0芯片实用HW2.5芯片 官方现已停止交付2020-03-03 12057
-
特斯拉HW3双重冗余系统可保证自动驾驶系统不会自动脱离2019-12-31 1273
-
特斯拉HW3的双重冗余系统激活,有双重保障?2019-12-30 4341
全部0条评论

快来发表一下你的评论吧 !
