

PLC的定位指令的使用程序和伺服接线图
电子说
描述
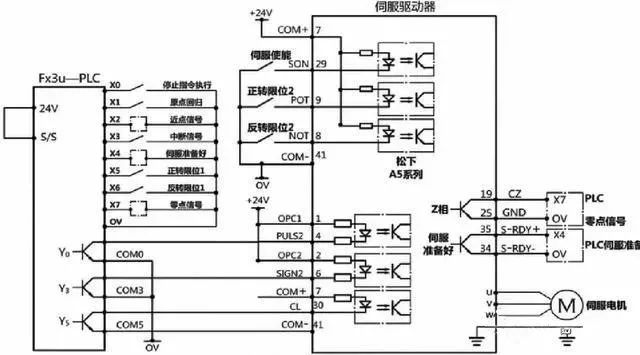
在这里我们使用的是三菱FX—3U的PLC与松下A5的伺服驱动器,我们在PLC上设计了停止指令,远点回归,近点信号,中断信号,以及正反转限位等。因为我们前面已经给大家介绍过类似这种接线图,现在就不一一介绍了。
伺服驱动器参数设置:
Pr0.01=0;位置控制方式,
Pr0.00=1;电机旋转方向设定,Pr0.05=0;光电耦合输入,(伺服驱动器有两种方式输入:一种是光电耦合输入,一种是差动输入。)
Pr0.06=0;指令脉冲极性设置,Pr0.07=3;脉冲+方向输入方式,
Pr0.08=3000;电机每转1周指令脉冲数,
Pr4.06=3847 ( 00000F07H) ;设置S17为清零输入端,
Pr4.11=131586 ( 0002020202H) ;设置S02为伺服准备好输出端,
Pr4.00=131586 ( 0002020202H) ;设置I1为反转限位2开关输入端,
Pr4.01=65793 ( 00010101H) ;设置SI2为正转限位2开关输入端。
Pr5.04=0;正反转限位开关2有效,
Pr5.05=2;正反转限位顺序设置,并清除脉冲偏差计数器为零
输入和输出信号说明:
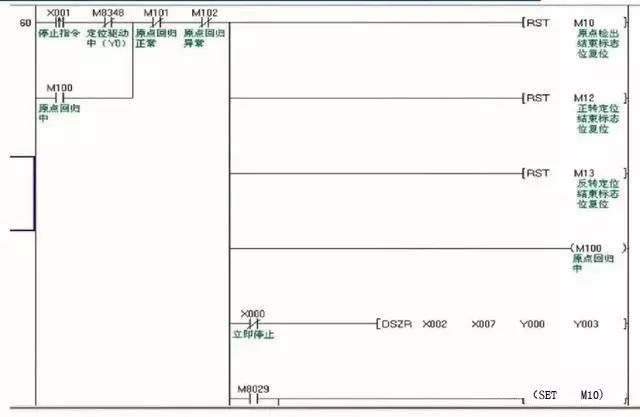
●X0一停止 定位指令执行,
●X1-开关瞬间接通,可执行原点回归指令( DSZR)
●X2一原点回归时,近点信号输入端,
●X7一原点回归时,接收伺服驱动器输出的编码器Z相信号输入端。即零点信号。
●Y000 -脉冲输出端,
●Y003- -电机旋转方向信号输出端
●Y005- 清零信号输出端。
说明:
1,使用X001输入端启动DSZR原点回归指令
2,使用M22正转点动,执行DRVI相对定位指令。
3使用M23反转点动,执行DRVI相对定位指令。
4,使用M24正转启动,执行DRVA绝对定位指令。
5使用M25反转启动,执行DRVA绝对定位指令。
6使用M31启动,执行ZRN原点回归指令。
7使用M32启动,执行DVIT中断定长指令。
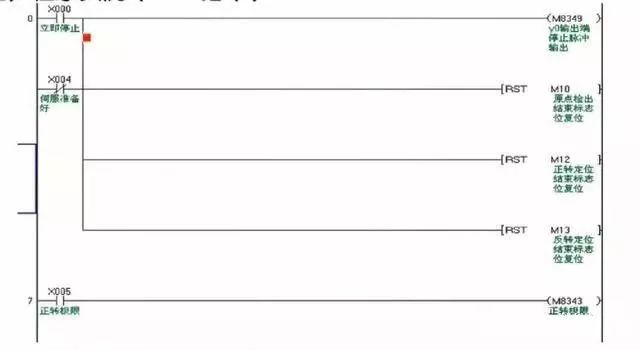
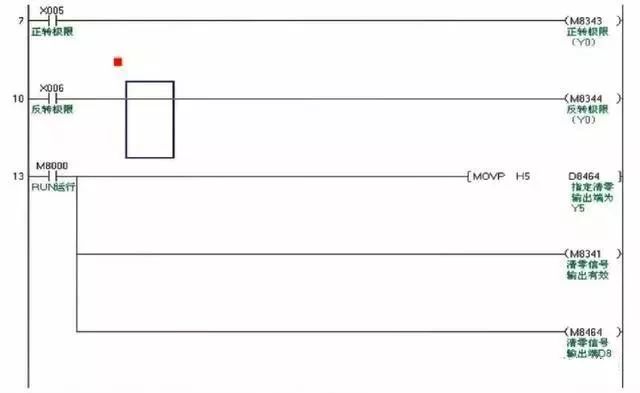
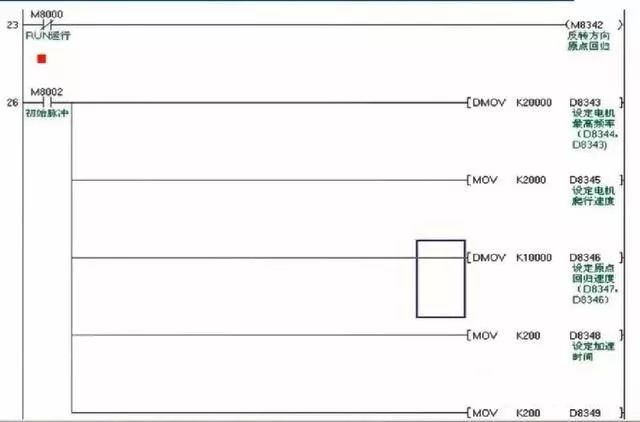
程序:
-
如何阅读PLC接线图?2023-01-30 11118
-
三洋PY系列 Q系列 R系列 伺服驱动器接线图2021-09-23 6766
-
英迈克伺服的说明书接线图更正2021-06-28 2350
-
伺服电机怎样接线_伺服电机接线图2020-07-29 140681
-
接线图2020-01-13 15032
-
PLC的定位指令的使用程序和伺服接线图2019-06-11 11126
-
伺服驱动器如何接线_伺服驱动器接线图2019-05-07 118639
-
伺服定位子程序带接线图2016-12-10 1126
-
APM接线图2016-05-29 12161
-
plc控制4个电机,求接线图2015-04-29 8194
-
电气安装接线图2012-09-21 7276
-
按键接线图2009-09-14 8818
-
变压器控制原理接线图2008-10-07 8599
-
plc端子接线图2008-02-21 7522
全部0条评论

快来发表一下你的评论吧 !
