

机器人对齐电极臂前的执行步骤
机器人
554人已加入
描述
C-5000 焊钳
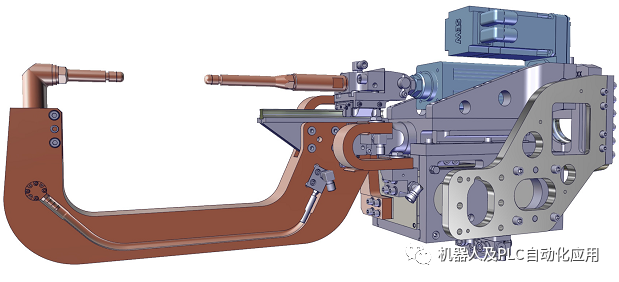
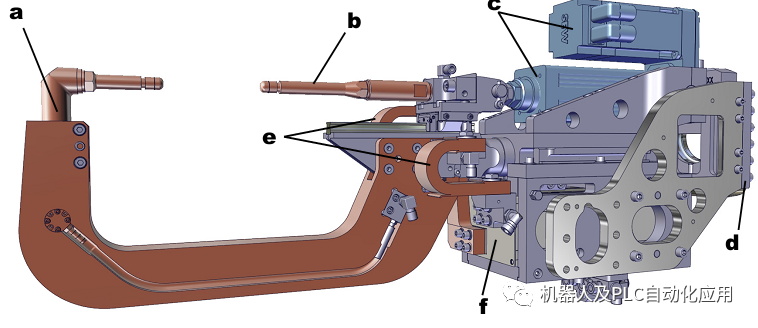
位置 a 固定式电极臂 位置 b 移动式滑动电极 位置 c 驱动电机 位置 d 托架及支撑板,用于手动式快速更换离合器 位置 e 导电带 位置 f 变压器 对齐 C-5000 电极臂 电极臂未最佳相互对齐可能是焊点不干净或工件变形的原因。 这可以根据结构相应进行调整。 C 型焊钳要么两个电极都可以转动,要么滑动电极可对齐至固定电极。 下面描述这两种可能性。 对齐电极臂前先执行下述步骤: 步骤 1: 切断机器人焊钳的电源。 步骤 2: 关闭冷却水循环。 步骤 3: 将带焊钳的机器人移至一个安全的维护位置。 或者分离机器人焊钳与机器人,并将机器人焊钳定位至适合进行维护工作的基架上。 转动两个电极:
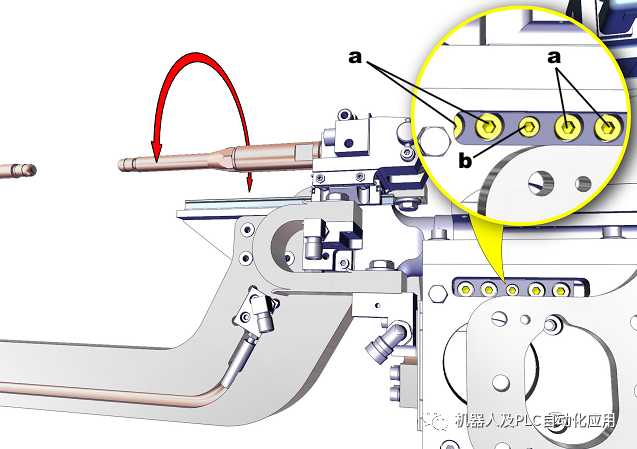
为了转动两个电极臂的整个夹座,请松开侧面的夹紧螺栓 (a) 并拧入扩张螺栓 (b),直到电极臂可以转动。 完成设置后,再次拧出扩张螺栓 (b),使夹紧螺栓 (a) 能再次夹紧电极臂。在夹紧电极臂前要检查所有绝缘件,确保没有损坏。 必要时更换绝缘件! 必须对齐绝缘套管槽,确保它在钳体的安装位置向下,以避免污物进入。 完成调节后再次拧紧夹紧螺栓。 调节移动式电极:
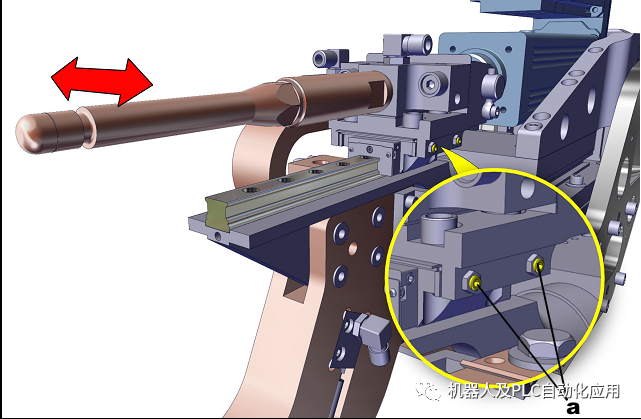
为了对移动式电极进行侧面调节,请松开两侧的夹紧螺栓 (a),然后改变电极位置。完成调节后锁紧夹紧螺栓。 电极的高度无法调节。
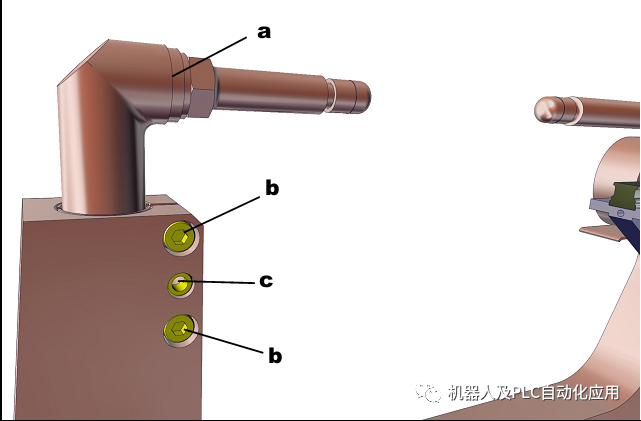
要调节固定式电极 (a),请松开夹紧螺栓 (b) 并拧入扩张螺栓 (c),直到电极可以转动。 完成设置后,再次拧出扩张螺栓 (c),使夹紧螺栓 (b) 能再次夹紧电极臂。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu2025-01-02 4286
-
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品2025-04-25 7431
-
什么是工业机器人2015-01-19 6815
-
【mBot申请】视觉机器人2015-10-29 2792
-
智久AGV搬运机器人呼唤更多中国籍的机器人2015-12-17 5328
-
可视化机器人2016-07-31 4424
-
工业机器人的工作原理2017-12-15 4788
-
海西智能下棋机器人2018-08-07 5583
-
如何控制真实机械臂/机器人呢2021-09-07 1860
-
机器人系统与控制需求简介2021-09-08 2357
-
机器人是什么?2022-03-31 22318
-
机器人技术中的操作臂的雅克比2017-05-18 729
-
制造业最常见的机器人——机械臂2020-09-29 4076
-
对齐C型气动焊钳上的圆形电极臂2023-03-08 1566
-
更换与旧电极臂对齐的电极臂2023-03-31 2485
全部0条评论

快来发表一下你的评论吧 !
