

跑大模型AI的K8s与普通K8s的区别分析
人工智能
描述
作者 | 华为云开发者联盟 tsjsdbd。
得益于AI开始火的时候,云原生体系已经普及,所以当前绝大多数的AI底层都是基于Kubernetes集群进行的资源管理(不像大数据,早期大量使用Yarn进行资源管理,在云原生普及后,还得面临Spark on K8s这种云原生改造)。
都知道云原生已经是Kubernetes的天下了,各大领域(大数据、互联网,基因、制药、时空、遥感、金融、游戏等)早已纷纷采纳。那在面对大模型AI火热的当下,咱们从程序员三大件“计算、存储、网络”出发,一起看看这种跑大模型AI的K8s与普通的K8s有什么区别?有哪些底层就可以构筑AI竞争的地方。
计算
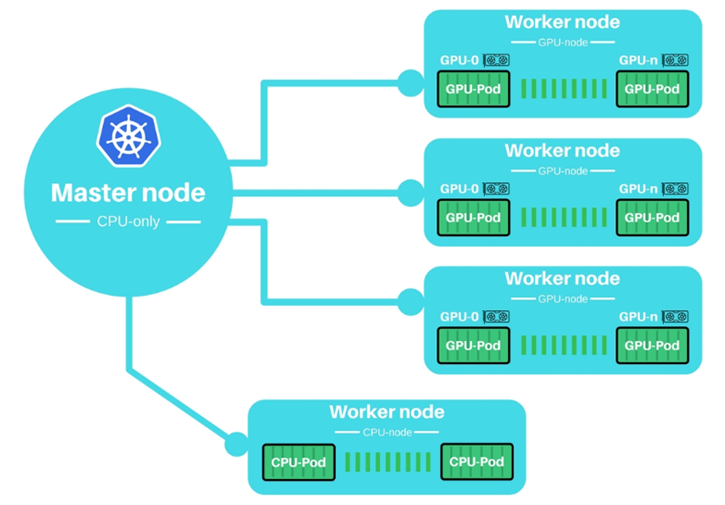
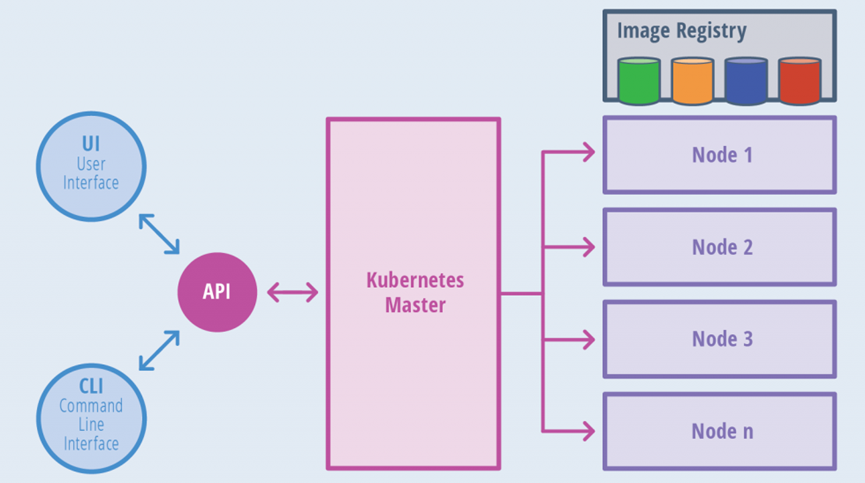
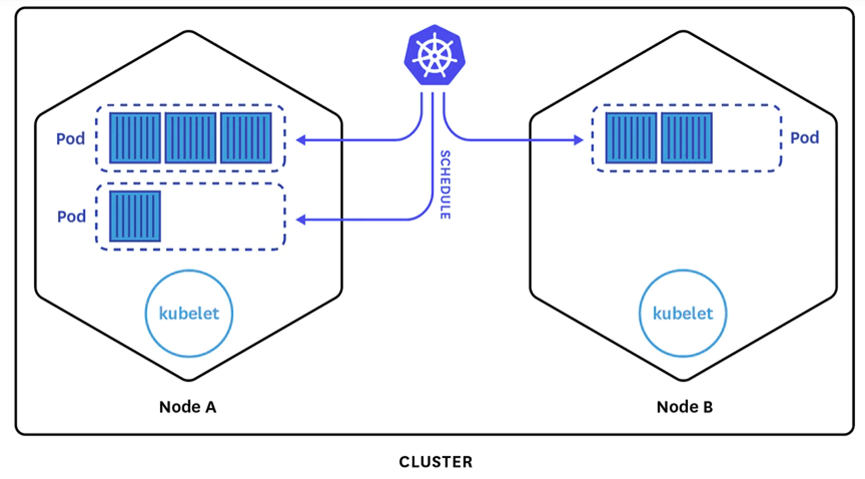
Kubernetes是一个在大量节点上管理容器的系统,其主要功能总结起来,就是在想要启动容器的时候,负责“找一个「空闲」节点,启动容器”。但是它默认考虑的启动因素(资源类)主要就是“CPU+内存”。就是容器指定“我要多少CPU+多少内存”,然后K8s找到符合这个要求的节点。
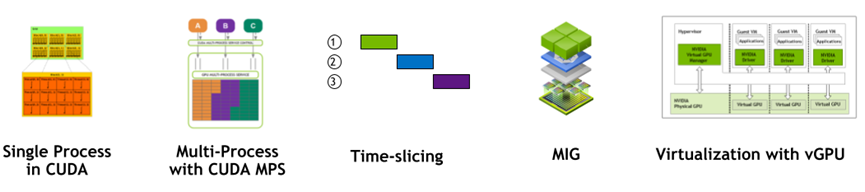
但是,当容器运行需要特殊“资源”的时候,K8s就熄火了。因为它不是认识“GPU”这种异构资源,不知道节点上面有多少“异构资源”(只统计剩余CPU+内存资源)。 K8s自己知道,异构资源千千万,每种使用方法也不一样,自己开发肯定搞不完。比如有RoCE网卡,GPU卡,NPU卡,FPGA,加密狗等等各种硬件。仅单纯的GPU管理,就可以有“每个容器挂1个GPU”,或者“几个容器共用1个GPU”,甚至“1个GPU切分成多个vGPU分别给不同容器用”多种用法。
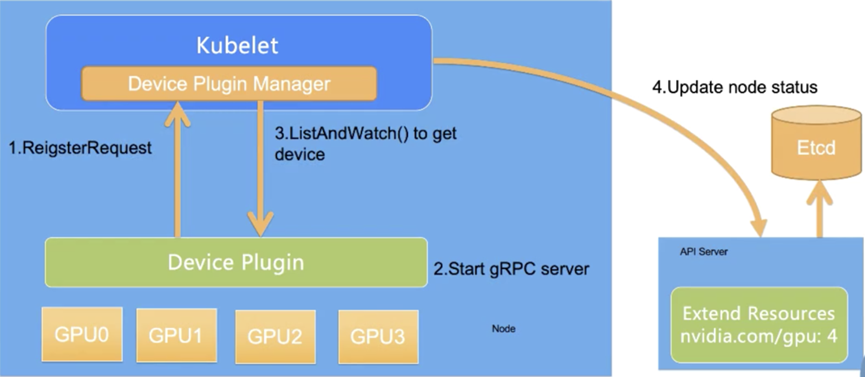
所以,为了成为一个通用的资源调度系统,它(K8s)搞了个插件框架,来辅助自己判断节点有没有“特殊资源”,叫做 Device-plugin插件。用户需要自己完成这个Device-plugin的开发对接,来实时通知K8s节点上面GPU的使用情况,辅助K8s按需分配GPU算力。 总结就是咱们的AI集群里面,总会有一个GPU的Device-plugin用来辅助GPU调度。例如昇腾、含光等各家自研NPU,就算是最简单的整卡调度,也得带这个DP(Device-plugin)。
如果还需要MIG这样利用vGPU功能来提升GPU的利用率的话,那么Device-plugin插件的实现也会复杂很多。因为A100之前没有提供GPU虚拟化的标准实现,这个就看各家神通了。
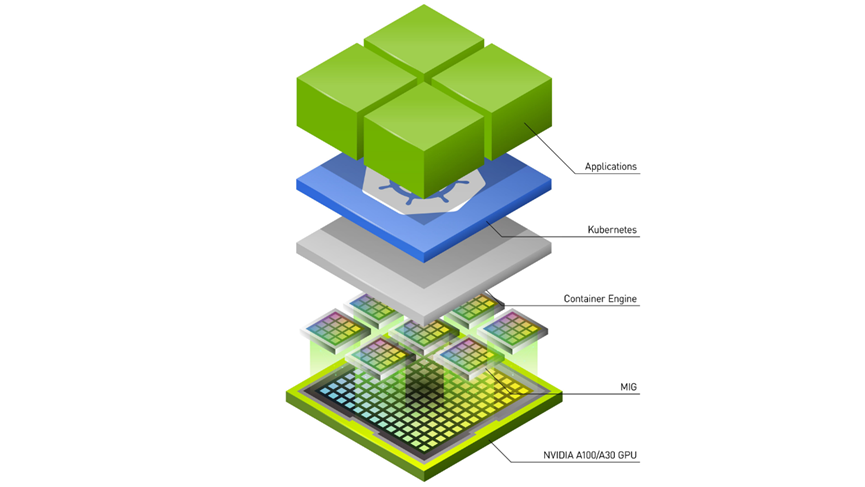
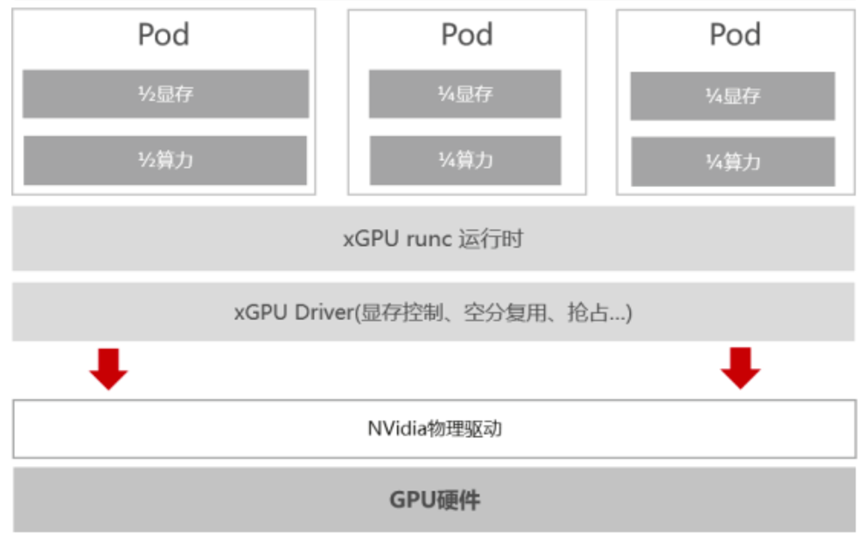
其实目的都是大同小异的:就是增强Device-plugin插件逻辑,实现GPU资源的复用(显存+算力隔离),来提升底层GPU整体的利用率。虽然K8s新版本1.27之后,可以使用DRA(Dynamic Resource Allocation)框架实现动态切分,但是当前绝大多数的集群,依然是使用DP完成这个逻辑。
而且,K8s设置的“异构资源”调度框架中,认为资源分配必须是“整数”的,即容器可以要1个GPU卡,但是不能要 0.5个GPU卡。所以想要实现多个容器,共用1个GPU卡的话(自己控制分时用,比如白天容器1用,晚上容器2用,这种性能比vGPU切分后用更好),还得增强DP逻辑(以及调度逻辑,后面会讲)。 最后,异构硬件故障的检测,任务的快速恢复,都需要这个DP的深入参与。
存储
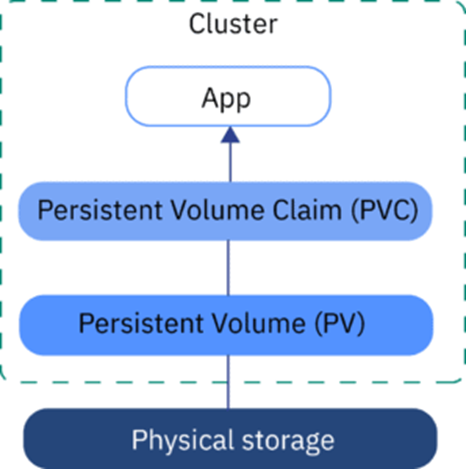
其实Kubernetes集群本身也不管存储,主要管理的是容器“如何接入”存储。通过引入PV和PVC概念,标准的K8s都可以做到将存储挂载至容器中,使得容器里面的程序,像使用本地文件一样的访问远端存储。
在大规模AI训练场景下,样本数据的大小还是很可观的,基本都几百T的级别。所以AI-Infrastructure对存储的要求也会比较高。 更大的区别在于:训练是多轮迭代来逼近目标范围的,因为训练数据量太大,数据无法全部放入内存,在每轮迭代结束后,需要重新从文件系统里读取数据进行下一轮迭代的训。即得重新访问样本进行一轮计算。那么如果每次都重新访问“远程”存储,性能必将大受影响(100T数据,每个epoch重新读一遍OBS桶,你想想那得多慢)。 所以如何将大量的样本数据,就近缓存,就是AI+K8s系统需要重点考虑的问题。分布式缓存加速系统,就是其中一条路线。
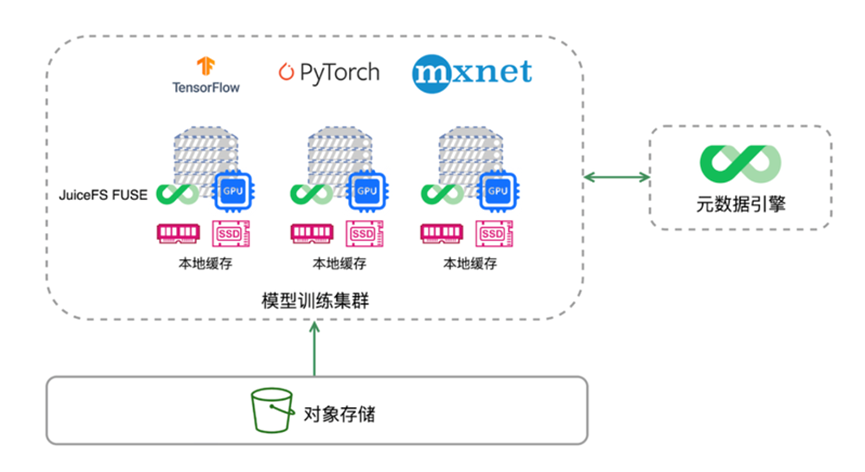
常见的有Juicefs,Alluxio等产品,以及各云厂商提供的自研产品。它们的特点是:利用服务器本身就带的高速存储(比如nvme高速本地盘),来缓存样本数据。并提供分布式文件系统,达到就近全量存储的目的。这样在多轮的epoch训练中,可以大幅的提升样本访问速度,加快整体训练进度。 所以建设or使用分布式缓存系统,也是AI平台建设中的重要一环。
网络
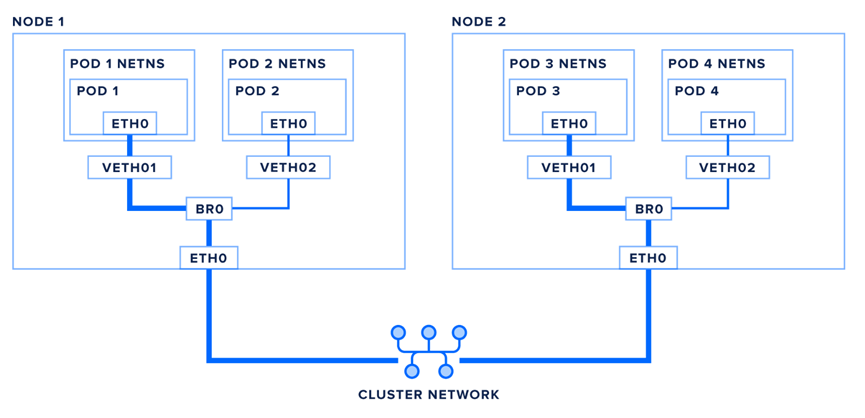
在Kubernetes的标准框架里,容器是只有1个网络平面的。即容器里面,只有1个eth0网卡。所以无论是利用overlay实现容器隧道网络,还是underlay实现容器网络直通,其目的都是解决容器网络“通与不通”的问题。
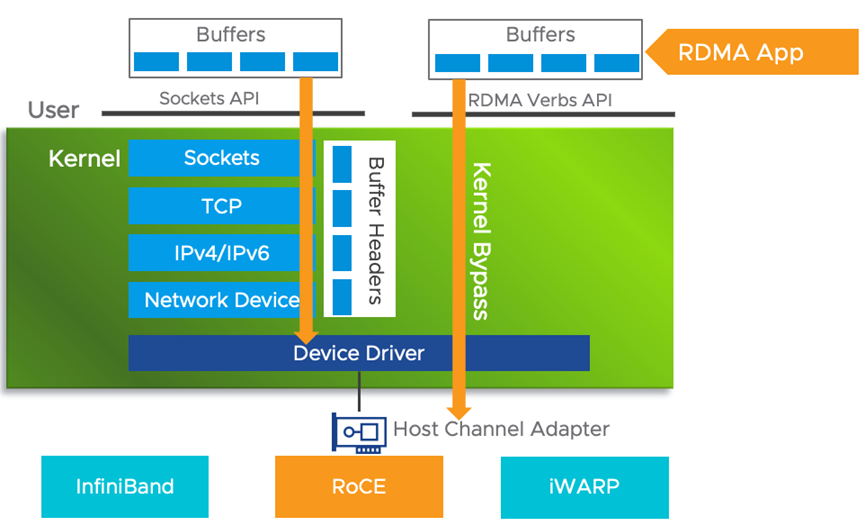
而大规模AI集群中,百亿、千亿级别参数量的大模型通常需要做分布式训练,这时参数梯度等信息要在节点间交换,就需要使用RDMA网络来传递。否则以普通以太网进行传输,其仅仅解决“通与不通”这种入门要求,参数信息传的实在太慢了。 RDMA可以绕过TCP/IP协议栈,并且不需要CPU干预,直接从网卡硬件上开始网络数据传递,网络传输性能可以大幅的提升,大大加快训练参数的交换。
所以咱们的AI集群中,必须要将RDMA网络管理起来,使得所有AI容器可以通过这条路,完成各种集合通信算法(AllReduce等)。
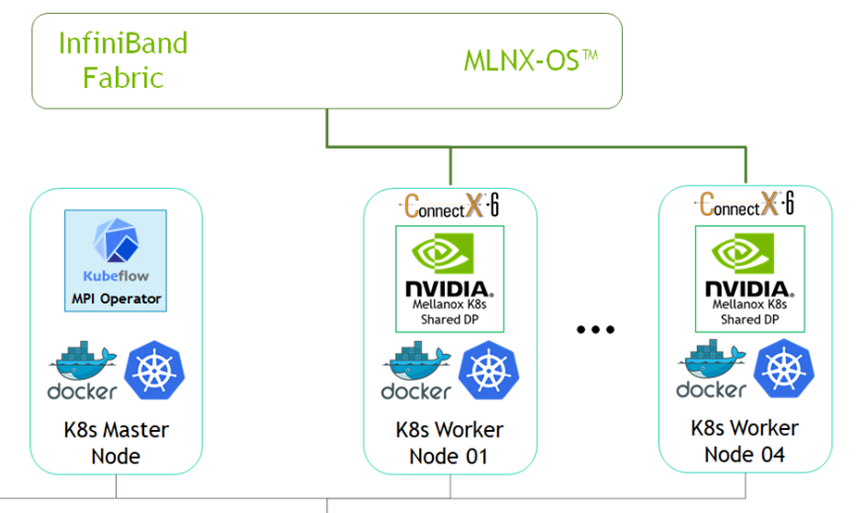
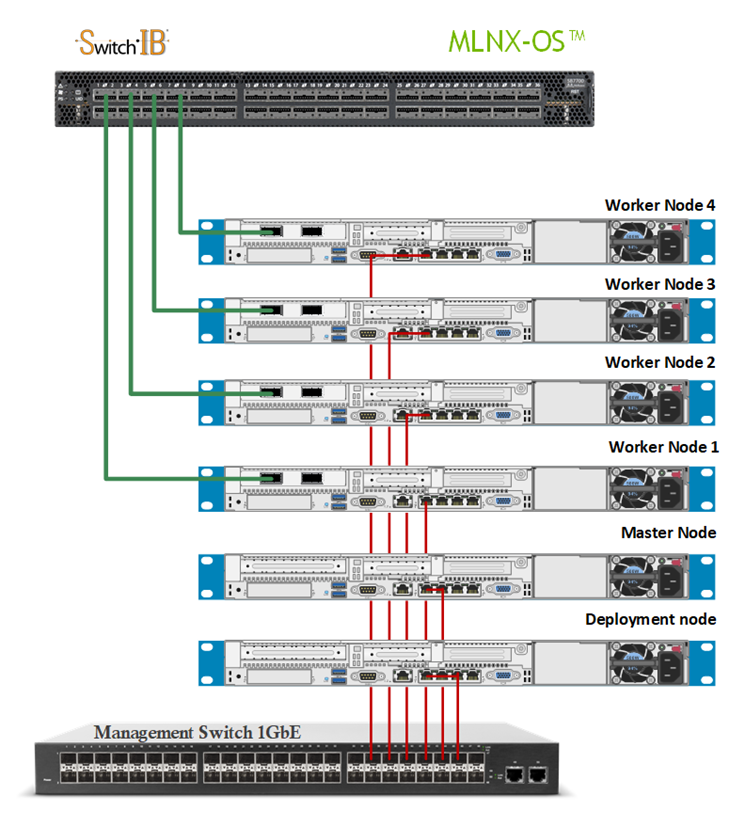
如上图,除了「底部」那条咱们平时看到的容器网络那条线外,顶部还有一个「参数面」网络。一般成本考虑咱们都是走RoCE方案,即用IB网卡+以太网交换机(而不是IB专用交换机)实现。而且由于RDMA协议要求网络是无损的(否则性能会受到极大的影响),而咱们要在以太网上实现无损网络,就需要引入PFC(Priority-Based Flow Control)流控逻辑。
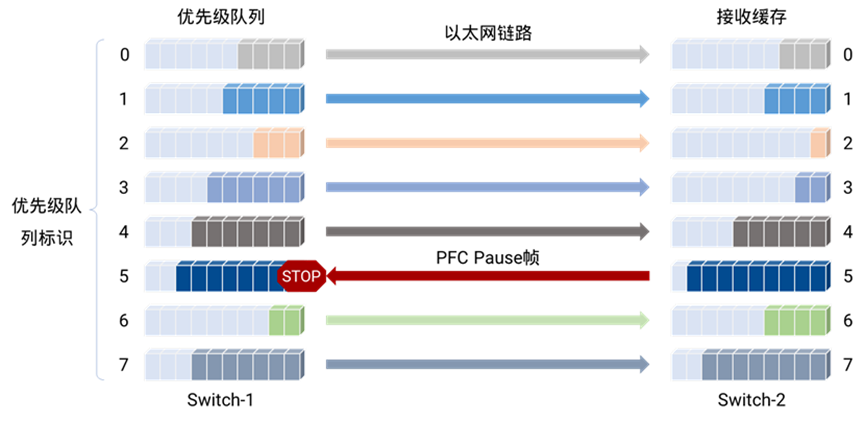
这个就需要同时在交换机和服务器RoCE网卡上,两侧同时配置PFC策略进行流控,以实现无损网络。
可见,「参数面」网络的管理,会比普通主机网络,多一份PFC调优的复杂度。而且,由于NCCL性能直接影响训练速度,所以定位NCCL性能掉速or调优NCCL性能,也是系统必须提供的运维能力之一。 并且RoCE网卡的管理,也属于“异构资源”,也需要开发Device-plugin来告知K8s如何分配这种RoCE网卡。而且GPU和RoCE网卡是需要进行联合分配的,因为硬件连接关系,必须是靠近在一起的配对一起用,如下:
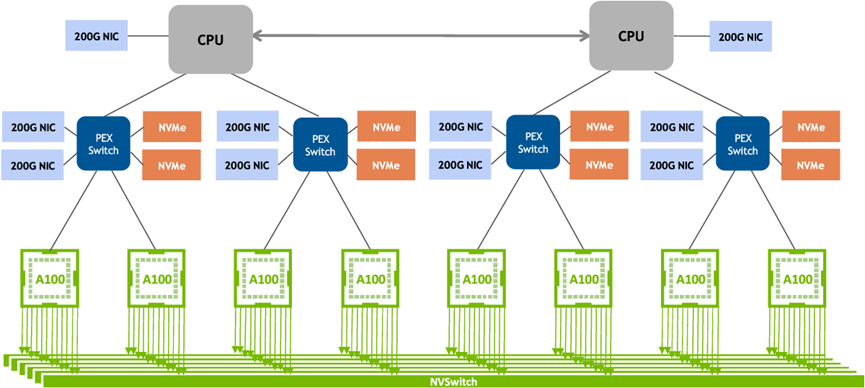
因此,除了「参数面」网络设备的管理分配以外,还得关联调度逻辑来感知这个RoCE网卡的硬件拓扑。
调度
标准K8s集群的容器调度,都是单个容器独立考虑的:即取一个容器,找到其适合的节点,然后取下个容器调度。但是分布式AI训练容器不一样,它们是一组容器。这一组容器,必须同时运行,才可以进行集合通信,即所谓的All_or_Nothing。通常也会叫「Gang Scheduling」,这个是分布式AI场景的强诉求。否则会因为多个分布式作业在资源调度层面出现争抢,导致出现资源维度的死锁,结果是谁都没法正常训练。
因此K8s自带的Scheduler调度器对这种分布式AI训练中的「pod-group」型资源调度就无能为力了。这时K8s提供的「调度插件」框架,又再次发挥作用。用户可以自己开发调度器,集成到K8s集群中,实现自己的容器调度逻辑。 于是,各家又开始整活了。什么Coscheduling,Yunikorn,Volcano,Koordinator,Katalyst等纷纷上线。目的都差不多,先补Gang Scheduling基本功能,再补些MPI等辅助功能。
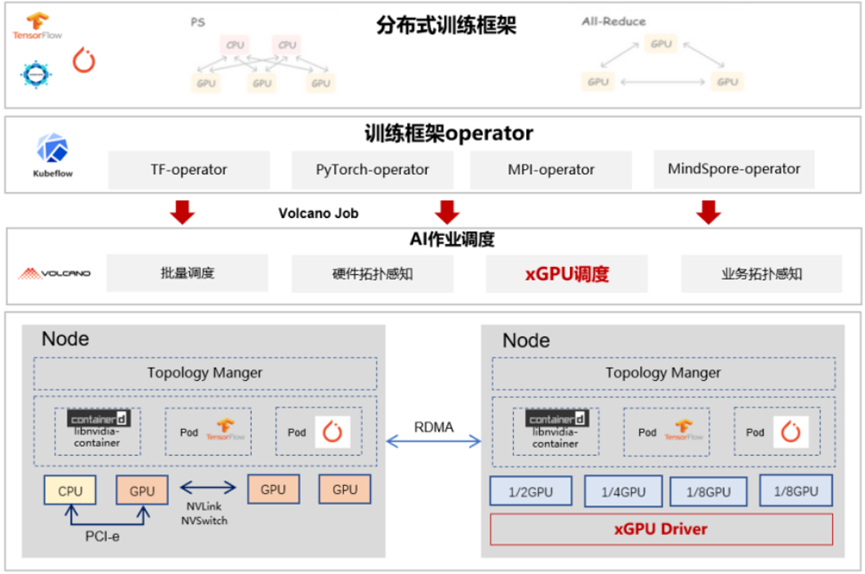
这里我们以Volcano为例,它除了完成分布式AI训练中「Pod-group」这种容器组的调度,还实现了容器组之间「SSH免密登录」,MPI任务组的「Hostfile文件」这些辅助实现。
小结
Kubernetes云原生管理平台,已经成为AI数据中心的标准底座。由于AI-Infrastructure设备价格昂贵(参数面一根200Gb的网线要7000元,一台8卡的GPU服务器,超150万元),所以提升资源利用率是一个收益极大的途径。 在提升资源利用率方法上,常见有(1)调度算法的增强和(2)业务加速 2种方式。 其中(1)调度增强上,又分Volcano这种pod-group组调度,来提升分布式训练的资源利用率。以及通过Device-plugin来获得vGPU算力切分或者多容器共用GPU卡的方式。 (2)业务加速路径中,也有通过分布式缓存加速数据访问的。以及通过参数面RDMA网络来加速模型参数同步的。
以上这些就是唐老师小结的,与平常使用CPU类业务的K8s集群不太不一样的地方。可见除了Kubernetes本身的复杂性外,要做好AI平台底层的各项竞争力,还是需要投入不少人力的。对云原生AI-Infrastructure有兴趣也可以多交流。
编辑:黄飞
- 相关推荐
- 热点推荐
- gpu
- AI
- 容器
- kubernetes
- 大模型
-
什么是 K8S,如何使用 K8S2025-06-25 276
-
OpenStack与K8s结合的两种方案的详细介绍和比较2018-10-14 28700
-
如何使用kubernetes client-go实践一个简单的与K8s交互过程2021-02-02 8113
-
Docker不香吗为什么还要用K8s2021-06-02 4388
-
简单说明k8s和Docker之间的关系2021-06-24 4466
-
K8S集群服务访问失败怎么办 K8S故障处理集锦2021-09-01 17440
-
K8S(kubernetes)学习指南2022-06-29 938
-
mysql部署在k8s上的实现方案2022-09-26 3824
-
k8s是什么意思?kubeadm部署k8s集群(k8s部署)|PetaExpres2023-07-19 1960
-
什么是K3s和K8s?K3s和K8s有什么区别?2023-08-03 9866
-
k8s生态链包含哪些技术2023-08-07 2553
-
k8s云原生开发要求2024-10-24 1506
-
k8s和docker区别对比,哪个更强?2024-12-11 1674
-
解析K8S实用命令2025-07-24 1184
-
一文带你彻底搞懂K8s网络2026-02-06 927
全部0条评论

快来发表一下你的评论吧 !
