

浅谈无人机的EMI的近场测试方案
军用/航空电子
描述
无人直升机航拍是以遥感无人机为飞行平台,利用高分辨相机系统获取遥感影像,利据的压缩和自动传输、 影像预处理等功能,可广泛应用于国家生态环境保护、矿产资源勘探、土地利用调查、农作物长势监测与估产、 自然灾害监测与评估、城市规划与市政管理、公共安全、国防事业、数字地球等领域。
目前消费级无人机以出口欧美发达国家市场为主,整机必须通过CE、FCC的认证才能获得市场准入资格;无人机多系统间的电磁兼容EMC(EMS+EMI)设计直接影响整机性能的稳定性(包括图像数据掉包、GSP定位、飞行距离控制等问题 )!其实,为了有效的抑制,解决电磁干扰问题,世界各国政府纷纷制定了电磁兼容EMC规范,并纳入强制执行的项目中,使得各种电子产品或设备要上市销售,就必须通过该国家承认的电磁兼容规范,比如欧盟的CE认证,美国的FCC,NEBC认证,日本的VCCEI认证,我国的3C认证等,都是电子类产品进入市场必须要取得的通行证。针对无人机这种机电结合的新型产品,国内有关部门也已开始制定针对这种产品类别的相关的EMC测试认证标准。
要做好无人机,强大的EMC设计能力是至关重要的,本文结合实战经验,从EMC设计的角度来解析无人机这一多系统集成的智能硬件产品!
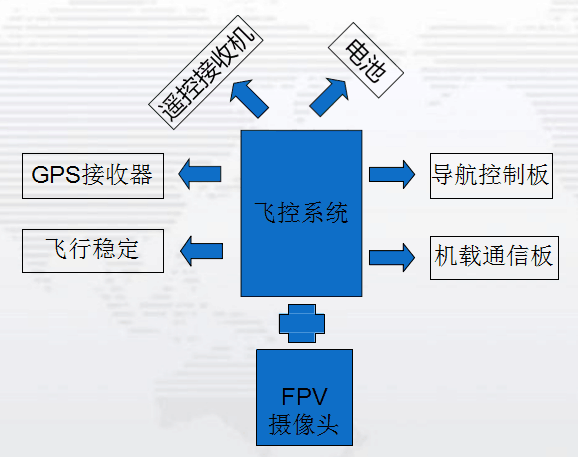
一、无人机平台架构
1、无人机飞控架构
无人机飞控架构,如下图所示。
2、无人机飞控
市面上曾经出现的无人机飞控如下:
大疆飞控
零度飞控
MWC飞控
APM飞控
二、无人机EMI现状及主要问题
1、无人机EMI现状
(1)EMI超标导致产品无法通过EMC认证,从而导致产品无法出口;
(2)EMI超标影响无线传输的信号质量(2.4G、5.8G)。
2、无人机主要的EMI问题
(1)航拍头的EMI问题;
(2)飞控系统的时钟及其倍频;
(3)马达发动机引起的EMI问题;
(4)电源引起的辐射发射抑制。
三、无人机的EMC问题
下面以一台小型电驱动无人机为例,说说有关的EMC问题,还会实测一下其基本的用电单元的近场的电磁干扰的情况。
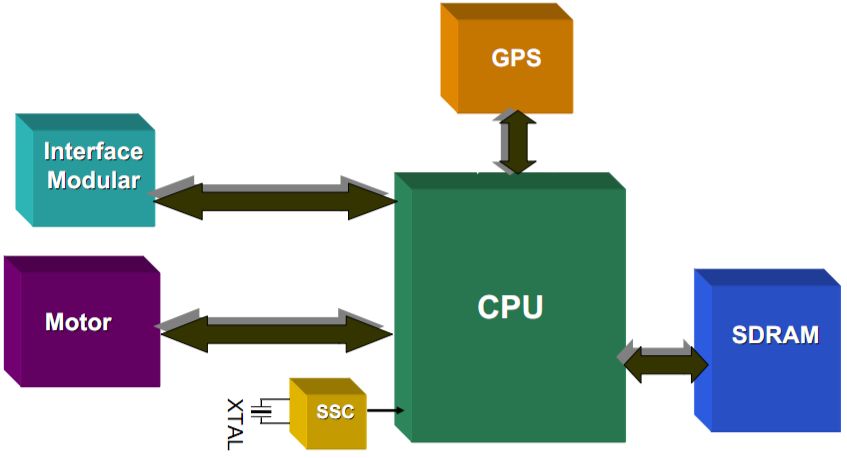
 图1:无人机的主要组成
图1:无人机的主要组成
1、无人机的电磁干扰(EMI)
电磁干扰分为辐射型EMI和传导型EMI两大类,传导型干扰通常指的是低频段的干扰,干扰信号会通过导电介质从一个电网络传导到另一个电网络;辐射型干扰通常指的是高频段的干扰,通过辐射电磁波的形式进行传播。
对于交流供电的电子电气设备来说,相关的传导型的EMI测试规范规定了被测电子设备通过供电线对交流电网的传导的电磁辐射的限值,目的是为了防止用电设备对电网的污染,影响接到电网上的其他用电设备的工作。而对于无人机来讲,使用的是机载电池供电,无人机上的各种电路单元之间的供电和各种信号会通过导线相连在一起,尤其是电驱单元工作时是否会通过传导对无人机上的其他单元产生影响,要看具体情况。在有些无人机上还会搭载图像传输设备,为了发射信号,射频发射机通过天线会在一定频段以一定功率产生电磁辐射。在无人机的各种电路板上,各种高频信号走线、集成电路的引脚、各类接插件等也都可能会成为具有天线特性的辐射干扰源,能发射电磁波并有可能会影响到周围其他电路系统或本电路系统内的其他子电路系统的正常工作。所以,在产品的设计阶段,对于机上各用电单元,我们不妨先采用近场测试,把它们都各自先扫一遍,摸清各单元的辐射型的电磁干扰的情况。
2、无人机的EMI的近场测试
针对电磁辐射型的EMI干扰的测试分为近场测试和远场测试两种。远场测试要在专业的微波暗室里进行,通过专用的接收天线和接收机测量相聚一段距离的整个无人机产生的电磁辐射的大小。而对于无人机本身来讲,机上的电路距离很近,它们之间有可能会产生相互影响,所以近场测试在研发阶段和故障诊断阶段是非常重要。远场测试能给出测试是否通过,如果没通过,在哪些频点辐射超标了,但是没有位置信息。通过近场测量可以很方便的实现对干扰的定位,可以精确定位到哪个器件,哪个芯片的引脚,哪根走线,从而判定干扰产生的原因,根据情况采取改进措施。
EMI近场测试常用到的仪器设备是频谱分析仪和近场探头,如图2所示。
接下来,就利用频谱分析仪和近场探头针对某款无人机上的飞行控制板,电子调速板,无刷电机这几个环节进行一些近场EMI的测试。
3、无人机飞控板的近场EMI实测
飞控板上的芯片比较多,彼此通过SPI、I2C以及并行的数字IO总线相连。可以采用孔径适合的近场探头对每个器件进行探测,看看它们各自产生的EMI大小。如图3所示,首先测测在这款无人机的飞控板上的IMU, 型号是MPU-6000,这是个9轴运动处理传感器,在这个传感器芯片上测到的EMI情况如图4所示,很像是时钟引起的。

图3: 对飞控板进行EMI的近场测试
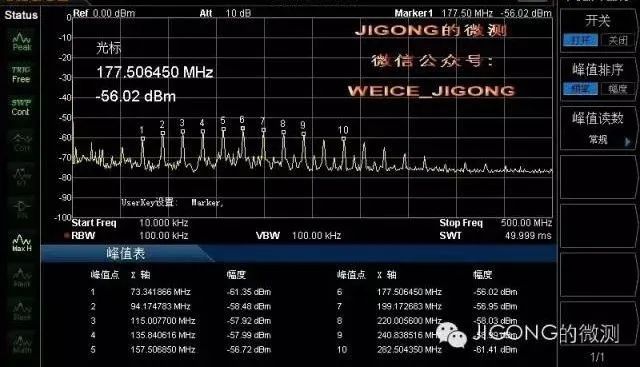
图4:MPU-6000的近场EMI情况
这款飞控板上还采用了STM32F427 Cortex-M4处理器以及其他一些器件,可以按照以上的方法,依次探测每个器件的近场EMI情况。
四、案例分析
1、航拍头的EMI问题
(1)航拍头架构CCD(以SONY effio方案为例)
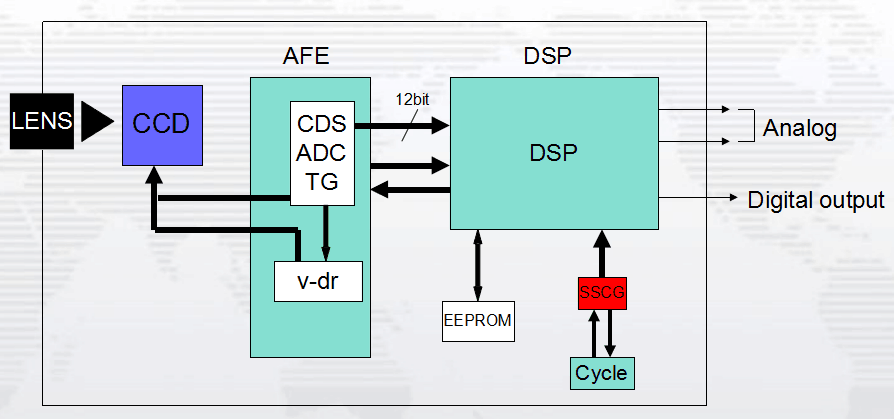
可能存在问题:
(1)DSP与AFE之间交换的时钟及倍频;
(2)DSP输出部分(output)的时钟及倍频。
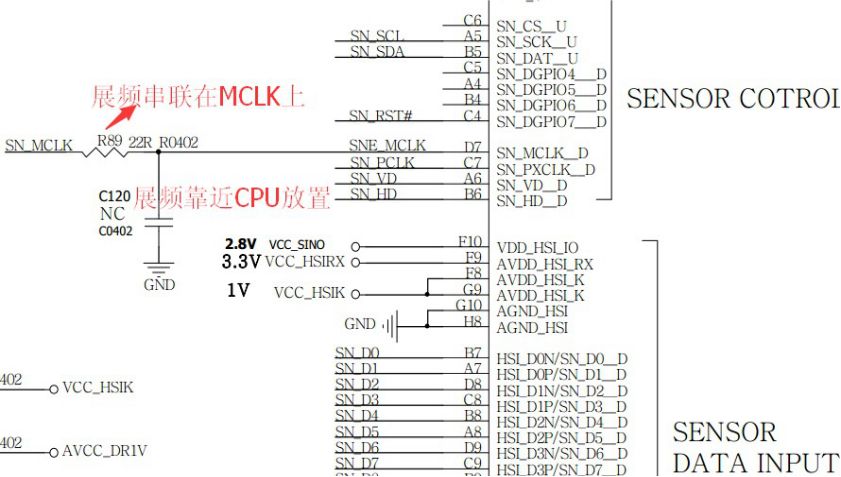
处理方法:在DSP晶体上使用展频IC。
(2)航拍头架构CMOS
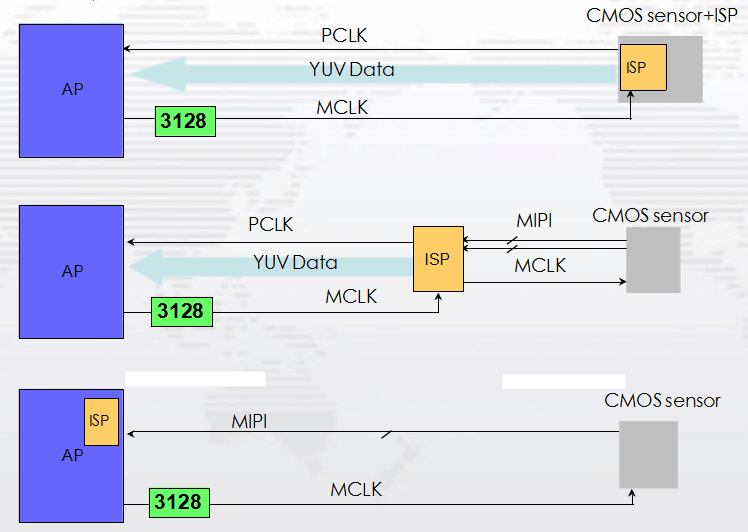
可能存在的问题:摄像头MCLK、PCLK基频和谐波引起的辐射超标。
处理方法:在MCLK上增加展频,可以有效的抑制摄像头MCLK和PCLK的基频和倍频的超标。
数据对比:
(3)应用案例
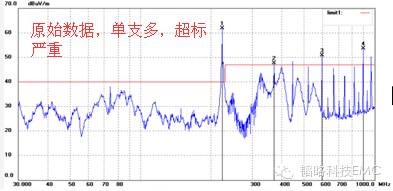
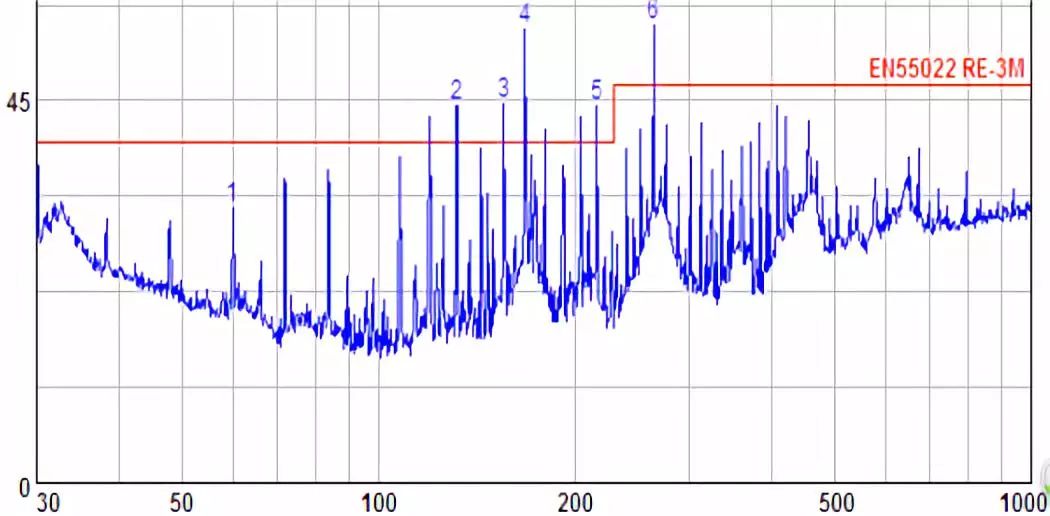
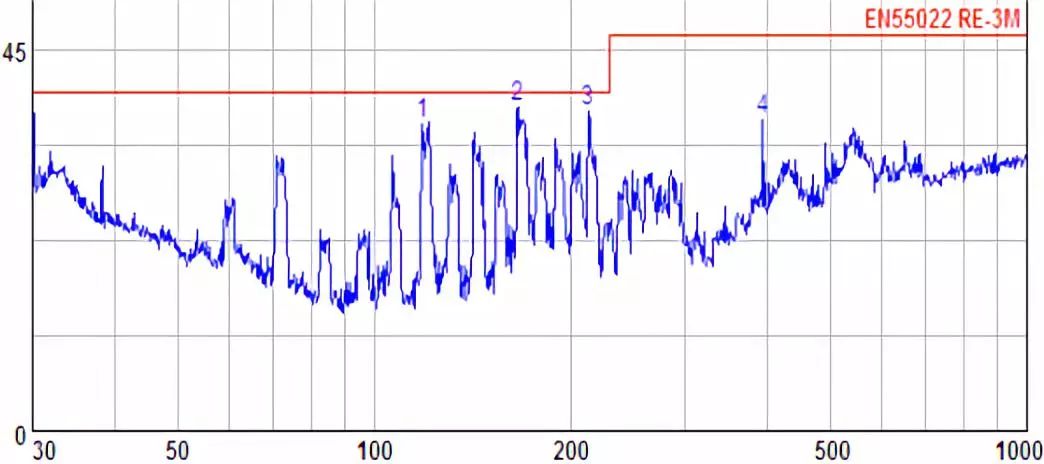
问题:SONY的DSP(CXD4191AGG)输出时钟74MHZ的倍频。

增加展频IC后的数据对比:
原始数据,单支多,超标严重。
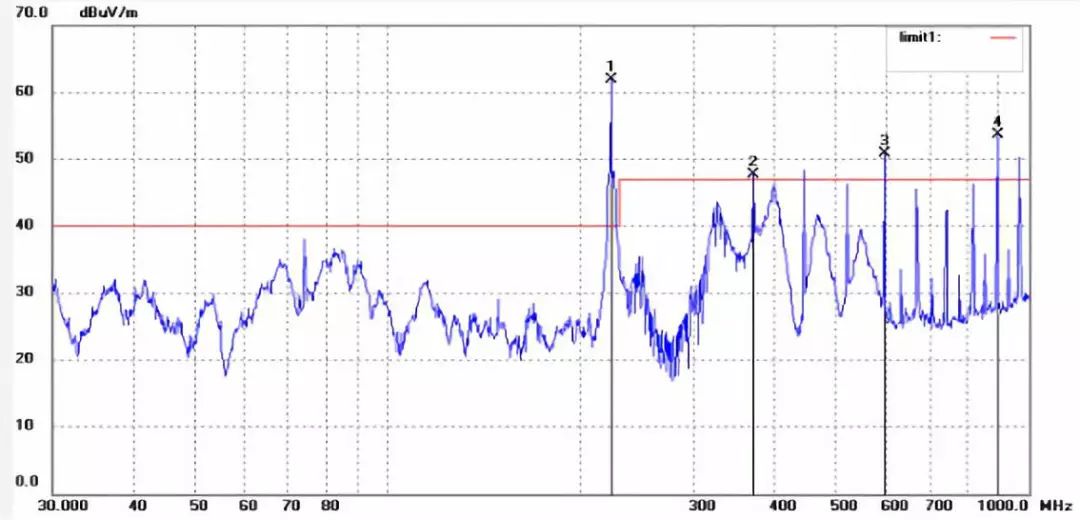
增加展频后,整体下降明显单支少。
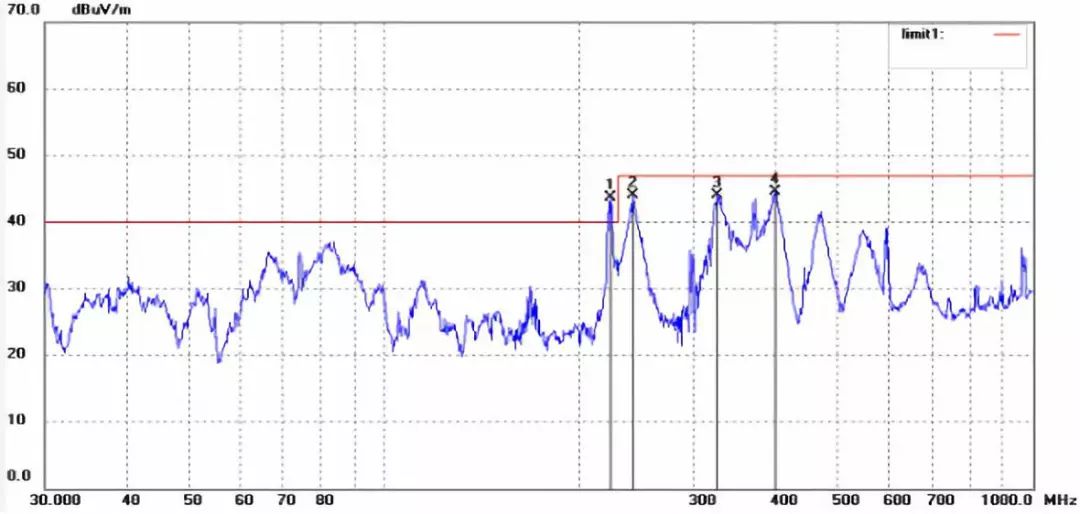
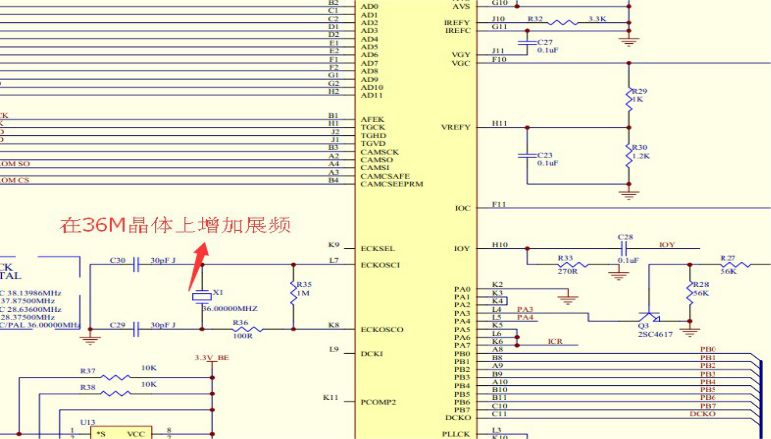
2、飞控系统的时钟及其倍频
可能存在的问题:主时钟基频以及倍频时钟辐射超标。
处理方法:使用展频IC。
增加展频IC后的数据对比:
用展频IC后, 整体下降明显。
展频IC前后的信号对比:
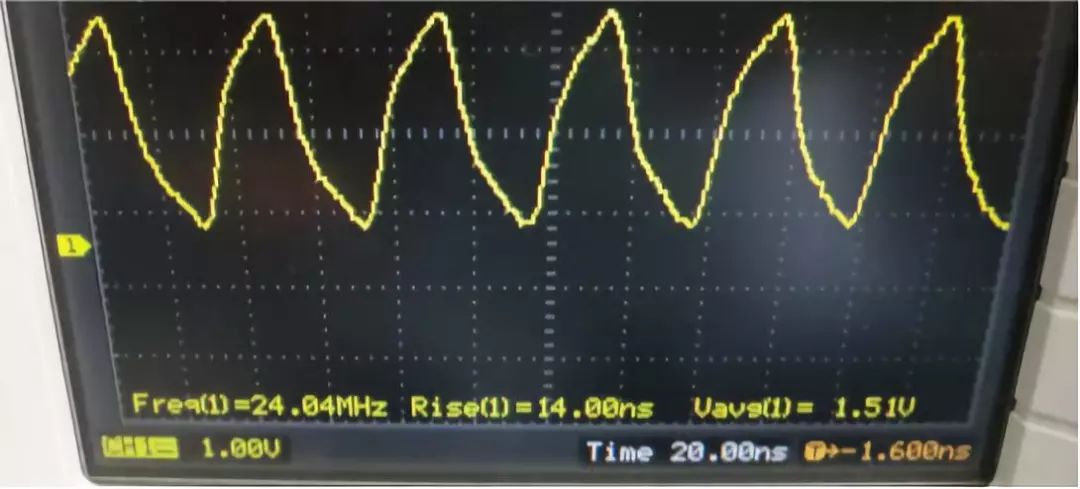
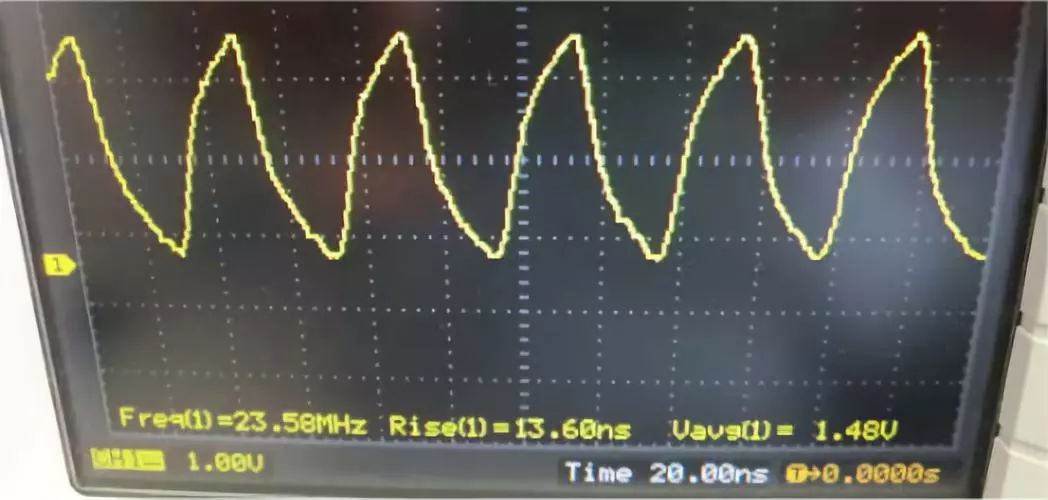
信号在加展频后完整性很好。
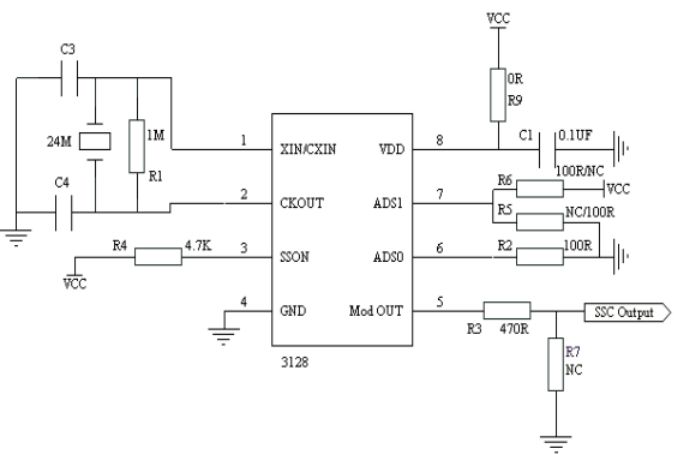
展频电路图
3、马达发动机引起的EMI问题
可能存在的问题:马达转动引起的噪声干扰。
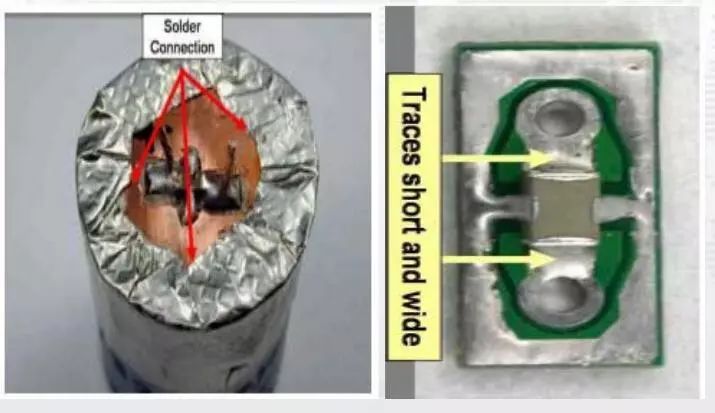
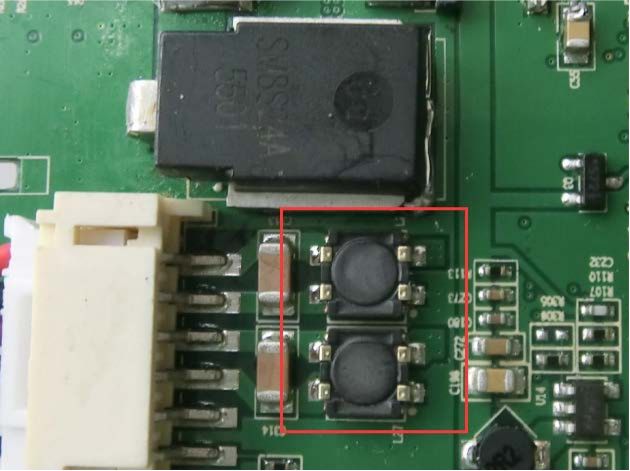
处理方法:在靠近马达位置使用BDL滤波器。
使用BDL滤波器前后EMI对比测试数据:
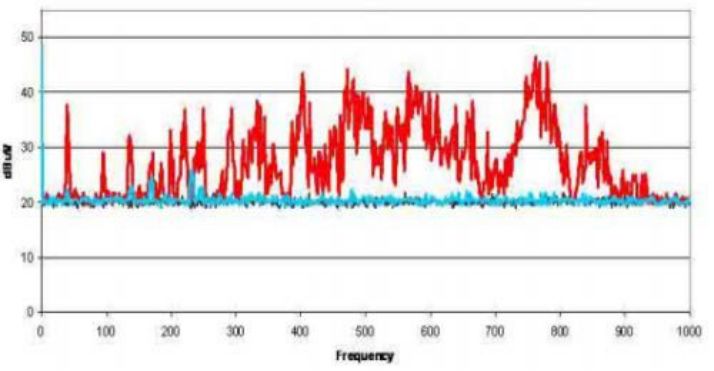
蓝线是增加BDL后的数据,下降的非常明显。
BDL(Balanced Dual-Line EMI Filter) EMI滤波器从1999年问世和在美国注册专利以来,已广泛应用于通信、网络、军事、航空、航天、医疗、消费电子、连接器等的电磁兼容领域之中。虽然BDL的电原理图和一般的EMI滤波器区别不大,它不过是由两个Y电容和一个X电容构成的一般EMI滤波器而已,见图1a)所示。如果进一步观察它具有结构特征的电理图,就会发现它的与众不同之处,见图1b)。
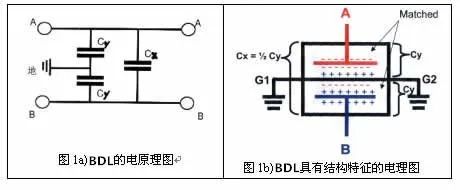
它具有如下特征:
1. 具备标准旁路电容的一切功能。
2. 增设两个并联的参考电极G1、G2,他们包围和分离电容的两个电极后构成法拉第屏蔽笼,或构成同轴线结构方式,这种电极配置方式是任何BDL组件所必需的。
3. 以上结构特征把原本不平衡的一个单端组件创造性地改造成为一个双端平衡组件,即改造成为由两个标称值完全相等的电容组成。
4. 电容的两个电极和参考电极G1、G2的结构尺寸遵循20H设计原则,使向外的电磁辐射减小70%。
5. 以上结构特征使BDL的ESR、ESL降到最低。
6. BDL平衡组件还具有以下特点:(1)线—地电容匹配(不平衡度在1~2.5以内)。(2)对温度变化具有对消作用。(3)对电压变化具有对消作用。(4)对两个电极具有同等老化的作用。
4、电源引起的辐射发射抑制
可能出现的问题:板与板之间地势不平衡,引起的共模干扰。
处理方法:使用专用高频滤波器隔离。
大电流共模电感与传统共模电感的阻抗特性对比图如下:
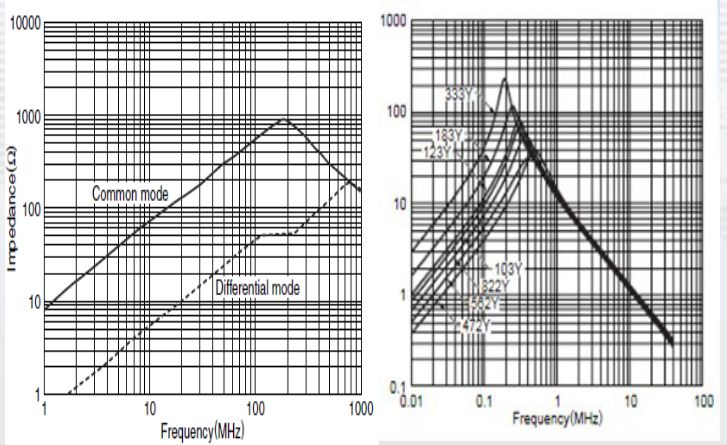
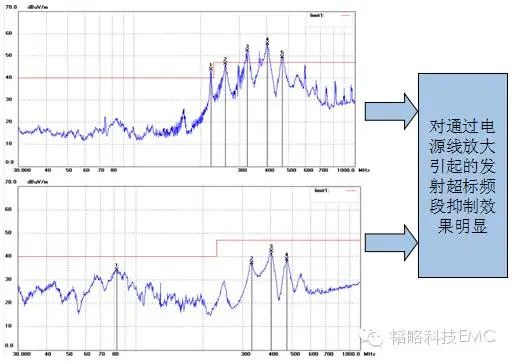
测试效果对比图:
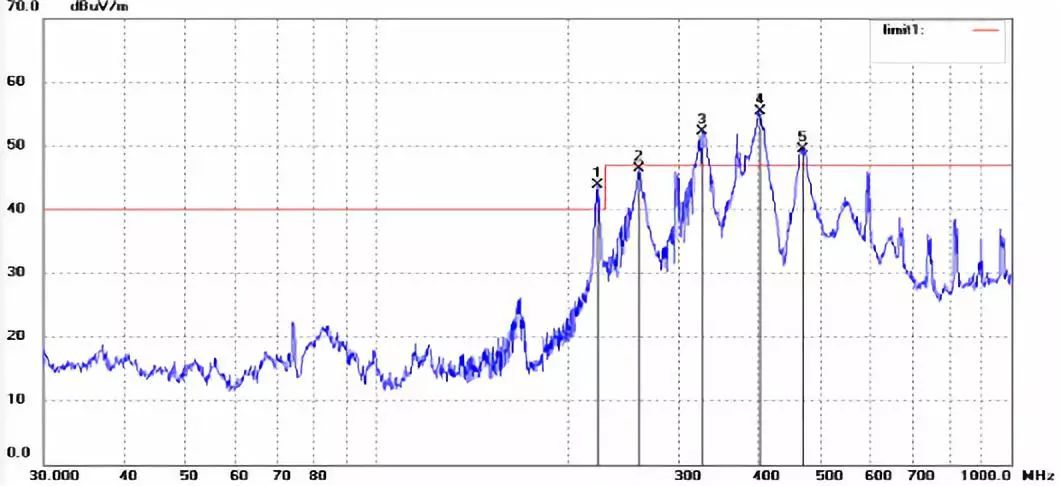
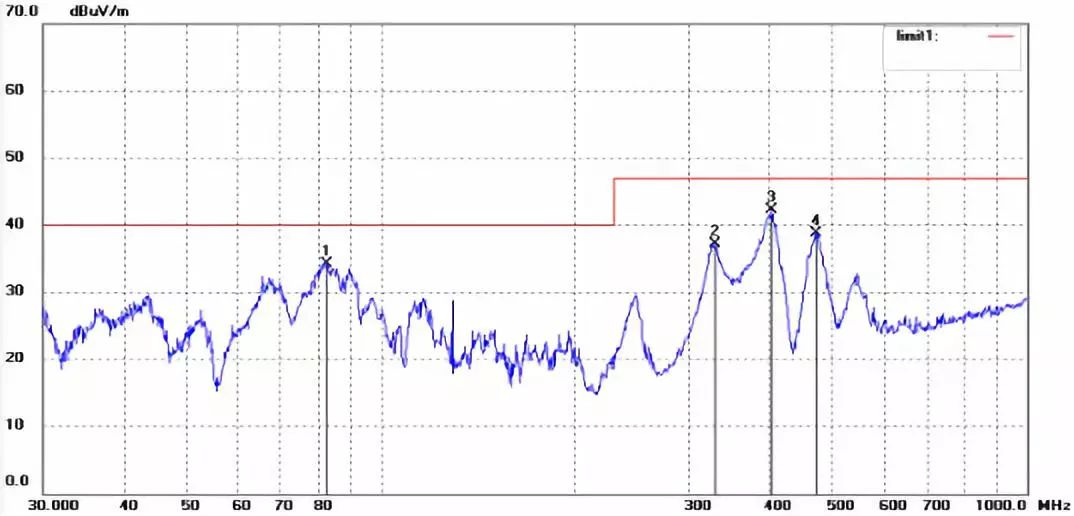
对通过电源线放大引起的发射超标频段抑制效果明显。
编辑:黄飞
-
无人机技术路线2026-07-10 459
-
【疯壳·无人机教程1】开源编队无人机-开机测试2022-08-19 9805
-
如何实施植保无人机方案?2021-12-20 2713
-
无人机云台是什么2021-09-01 10629
-
无人机探测技术2020-07-29 2981
-
航模/无人机遥控的解决方案2020-07-03 3511
-
多轴无人机BLDC驱动解决方案2020-07-02 3422
-
无人机商用测试征途2020-05-13 3258
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3862
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7490
-
无人机培训2017-02-13 4275
-
无人机你们是知道了,那么反无人机有几个会知道?2016-09-26 5485
-
【ELF灵翼自拍无人机申请】灵翼航拍无人机测评2016-04-19 2925
-
无人机开发方案要领与电路图集锦2015-05-07 10539
全部0条评论

快来发表一下你的评论吧 !
