

如何用过热时间常数实现伺服电机过载管理?
描述
当需要较高的间歇功率密度值时,工程师通常不希望使用传统的均方根(RMS)计算,转速-转矩性能曲线就成为了挑选伺服电机和驱动器的标准方法。但这样做可能会导致电机或驱动器容量不足。
对于大多数伺服应用来说,使用经典性能曲线与RMS计算是完全可以接受的。但如果应用的间歇转矩在一定时间段内大于电机的持续转矩,则不应忽视所拟解决方案的热时间常数。当情况由于缺乏更多余量空间时而进一步加剧时,这些热限值就会变成又一个隐患。
本文提出了一种在应用中实际电流长时间大于持续电流时加强伺服电机热时间常数动态影响严重程度风险管理和理解的可视化方法。
方法原理
伺服电机由于其内部损耗而产生热量,且每个电机的自身散热能力决定了其额定连续容量。传统的伺服电机应用需要多种不同速率,同时要求转矩在定义的运动曲线上小于或大于电机的额定间歇转矩。传统上,通过超过伺服电机连续能力的峰值电流来实现加减速要求。运动曲线大多情况下要求这些峰值电流的持续时间段最大不超过驱动放大器一般允许的4-5
在这种常规间歇工作运行情况下,通常不需要根据应用的峰值转矩要求,在电机的连续能力范围内选择电机。我们只需利用均方根(RMS)方程来找到应用的有效连续转矩和速率要求,然后确保此等效操作要求落在所选电机的连续和热能力范围内;同时验证在所需的转速下,所需的峰值转矩小于所选电机和驱动器提供的峰值转矩。
应用:特殊工况
将闭环运动控制技术扩展到非传统的应用中,通常会导致超出常规间歇工作的特定要求和运行工况。然而,即使在传统应用中,我们有时也会遇到必须满足的特殊工况。
示例:
对于一旦发生急停必须在断开主电源之前在特定时间内停止所有受控运动这一要求,对于大多数应用来说,这通常不是问题,但在具有巨大动能的大型机器上,使轴运动停止所需的时间很容易超过电机驱动组合典型的最长4-5 秒的可用峰值电流时间。
这一要求虽然不需要更大的电机,但通常需要更高的连续电流驱动,以确保提供急停减速期间所需的峰值电流。对于一些大型机器,急停时间要求在20到40秒范围内并不少见。
目前相当多的伺服电机应用具有特殊的运行工况或面临可能发生的特殊事件,在伺服电机定规和选型过程中需要考虑这些工况或事件。无论环境是否会影响电机的使用,均应选择合适的伺服电机和驱动器组合以最大限度地降低由于特定事件或操作要求带来的故障风险,从而最大限度地提高可靠性和安全性。
过载:功率损耗的影响
根据应用要求的复杂性,许多应用都要求转矩和电流高于电机的持续转矩和电流(Ic 或 I_rated)作为所需RPM的因变量。因此,需要考虑电机功率损耗的潜在限制或控制,以便完成工作或特定事件,同时保护电机的绝缘系统免受热过载的影响。对于评估中的这些特定情况或事件,尽管仍然需要确保整体产品选择要求,过载情况可能因应用不同而差异巨大。
对于这些具有某些潜在事件或其他情况的应用,需要特定的峰值电流(I_actual)才能在合格的时间段内产生特定的峰值转矩(Tpk)。此时,我们还需要了解并确定电机的绕组/线圈是否可以在不损坏电机绝缘的情况下维持所需的过载电流。
温度每超过连续额定值10°C,电机绝缘的可用寿命(基于其连续额定值)就会大约减半。
我们可以使用以下公式估算电机线圈/绕组从冷启动(环境)到额定极限温度(t_ ultimate)的时间:
t_ultimate = -TCT_coil(mounted) x ln[1-(W_loss(rated)/W_loss(actual))]
or
或
t_ult. = -TCT_winding x ln[1-(Ic2/I_actual2)]
其中W_loss(rated)替换为Ic2 或I_rated2,W_loss(actual)替换为I_actual 2
过载对热时间常数(TCT)的影响
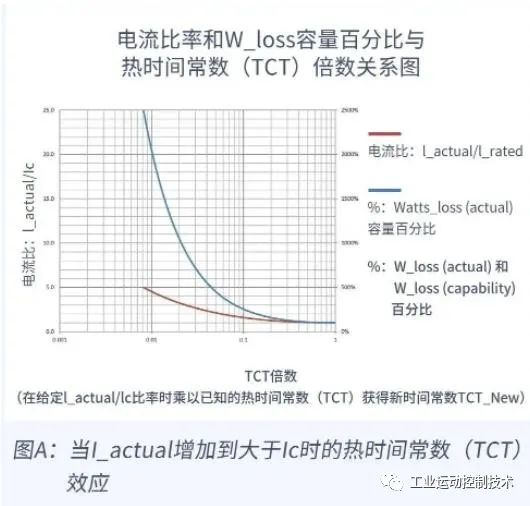
在下图 A 中,特定条件下I_actual大于 Ic(motor)的I_显著性可以通过W_loss(actual) / W_loss(rated)的百分比来表示,两者都给出了相对于计算的热时间常数 (TCT)倍数的曲线图。
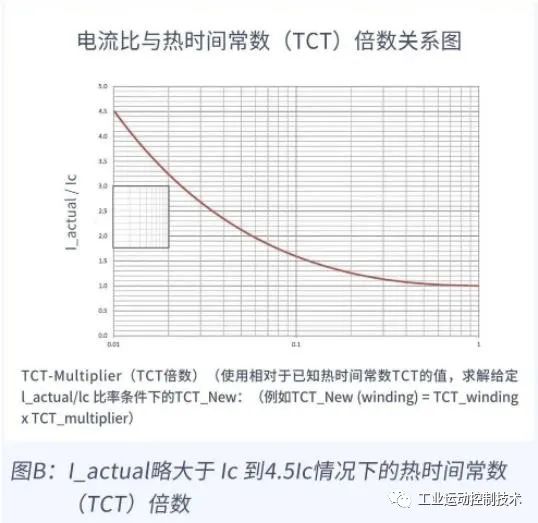
图B允许我们以图形方式确定特定的TCT,从而确定所评估的特定条件下达到极限温度的时间,其方法是将图形的X轴对应(TCT)倍数作为所需I_actual相对于已知TCT的函数,然后将该结果乘以 5,以确定达到极限温度的时间。
示例:
问题1:无论驱动器的供电能力如何,假设我们从一开始就处于25°C的环境温度,电机能否在20秒时间内承受3倍IC的峰值电流?假定最初提出的电机应用在正常运行时TCT_winding= TCT_coil(mounted)=60秒。
Q1 答:使用图 B,我们只需转到左侧的垂直刻度 3 (3xIc) 并沿水平移动,直到与曲线相交,然后在半对数刻度上读取相应的 X 轴乘数,将其和公布的TCT_winding相乘。
3Ic 时 X对数轴的读数约为0.023,因此,在3Ic时,有效TCT_winding(3Ic) = 0.023 x 60 = ~1.38_sec。
因此,对于此应用,我们将需要选择更大的电机或具有更长TCT_winding的电机,或更改条件。
问题2:由于问题1中的电机无法在3Ic情况下实现耐受30秒,我们可以实现在Ipk为2Ic的情况下耐受20秒吗?
Q2 答:同样地,使用图 B,我们可以获取2Ic时X对数轴的读数大约为0.057。因此,在 2Ic 时,您的有效TCT_winding(2Ic) = 0.057 x 60 = ~3.42秒,从而可以知道5xTCT = 99.3%的温升时间约为17.1秒,它仍然小于建议的20秒规格。
因此,即使将规格更改为2Ic时耐受20秒,我们也需要选择更大的电机或具有更长TCT_winding的电机,或者再次更改条件规格。
结论
显然,在机器设计规划阶段有许多因素需要考虑。针对给定应用的伺服电机和驱动器选择,会影响机构在所有条件下成功实现所需性能的机会:正常运行、急停和可预见的潜在事件。如果要求电机的转矩和电流需要有上其中一类的要求,在较长时间内超过额定连续能力,利用简化的图形方法(图B)可以帮助广泛的风险管理决策克服初始设计的挑战。
-
算时间常数时的rc单位是什么2024-09-19 11382
-
滤波器的时间常数怎么理解2024-07-26 9918
-
RC时间常数的意思是什么?怎么算RC时间常数?RC时间常数的测量?2023-11-20 24550
-
“时间常数”哪学来的?2022-08-03 4519
-
伺服系统的机械时间常数是什么2021-09-30 2265
-
什么是时间常数2021-09-13 2337
-
伺服系统的机械时间常数及电气时间常数是什么2021-06-28 2036
-
电路时间常数怎么求2017-11-15 210372
-
rc电路时间常数的定义及计算2017-11-01 373105
-
如何计算时间常数RC2009-08-14 16788
-
如何巧算时间常数RC2009-08-13 2852
-
常用改进时间常数的电路2009-04-08 1214
全部0条评论

快来发表一下你的评论吧 !
