

基于GD32F407VET6主控芯片的永磁同步电机控制器设计
工业控制
描述
作品选用GD32F407VGT6单片机作为主控芯片,将永磁同步电机的无感控制技术与单电流传感器控制技术两个研究热点相结合,利用单母线电流传感器实现永磁同步电机全速范围无位置传感器控制,主要创新点有:
1)提出一种准边沿对齐脉宽调制技术和单母线电流分时采样误差补偿方法,提高了单母线电流传感器电流检测精度;
2)提出单母线电流采样下的基准边沿对齐脉宽调制技术的全速无位置传感器控制策略,零低速采用高频方波注入位置估计,并结合模型参考自适应观测器,实现了高动态性能、高稳态精度的全速范围无位置传感器控制;
3)提出一种单母线电流采样下的动态零矢量注入初始位置估计方法,可以实现表贴式/内嵌式两类永磁同步电机的初始位置和转速估计,在电机具有大初始速度情况下可以快速切入闭环运行(简称带速重投),为大惯量系统的安全可靠运行提供了保障。
作品以国产MCU为核心,配合成熟的硬件方案和完善的软件算法,解决了永磁同步电机在单母线电流传感器拓扑驱动下零低速和中高速范围内无位置传感器控制问题,实验效果优异,对于提高永磁同步电机在风机、水泵、电动工具等应用领域具有积极意义。
算法简介
准边沿对齐脉宽调制及单母线电流分时采样误差补偿
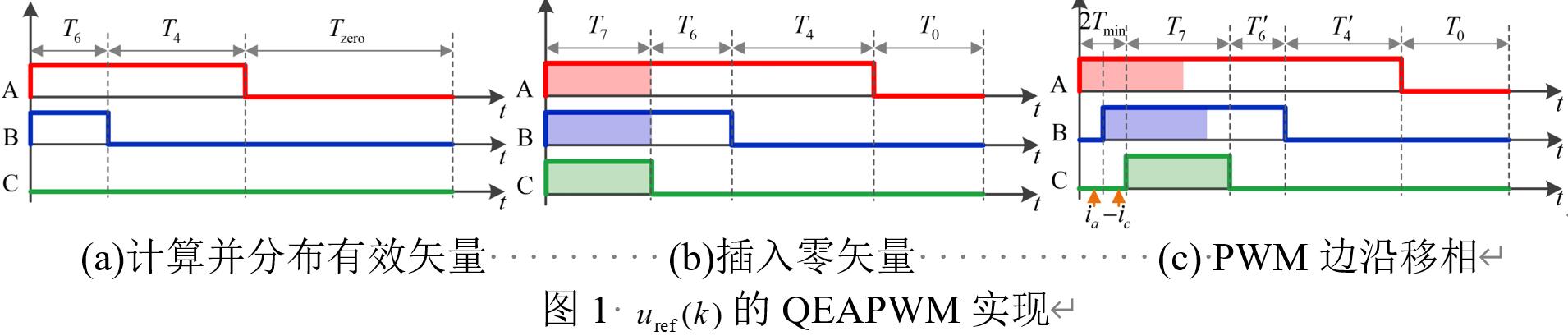
QEAPWM方法核心思想是将三相PWM导通时刻移到一个边沿,并重新分布零矢量。QEAPWM的有效矢量计算与分布,零矢量的插入,PWM边沿移相,分别如图1 (a)、(b)、(c)所示,将三相PWM波形移至PWM周期的左侧,生成QEAPWM。
在额定负载情况下测试,本作品使用的QEAPWM性能在各方面都非常接近基于SVPWM的常规方法。通过电机的电压方程与采样矢量dq轴电压方程udq_s得到采样矢量作用时的_dq_轴电流增量进行反Park和反Clarke变换,即可得到ABC坐标系的电流增量,完成三相电流的补偿。



单母线电流采样下的基于QEAPWM的全速无位置传感器控制
提出一种方波高频注入+MRAS观测器相结合的永磁同步电机全速无位置传感器控制策略,其控制框图如图4所示。
当转速小于时,角度与转速信息均由高频注入法获得;当转速大于时,角度与转速信息均由观测器法获得;当转速处于过渡区间时,角度与转速信息采用如图5(b)所示的线性加权方式获得。


如图6所示对全速域无感进行测试,在空载情况下,实现高动态响应转速闭环控制。在带载情况下,驱动器的角度估计精度基本无变化。

单母线电流采样下的动态零矢量注入带速重投方法
AZVVI通过注入合成矢量等效为零矢量的六有效矢量,通过有效矢量激励下的电流纹波采样,实现转子初始位置和初始速度的估计与快速带速重投。图7所示为注入六个电压矢量。图8为PLL的框图。

图9展示是否采用带速重投策略投切的对比实验图,由于没有正确估计电机转子位置与转速,直接重投冲击电流较大,很有可能造成驱动器的损坏。使用AZVVI法后重新切入,驱动器顺利重投而无冲击电流。

作品总结
本作品设计了基于国产GD32F407VET6主控芯片的永磁同步电机控制器,并提出一系列创新的电机控制算法。
在仅有单母线电流传感器的情况下,实现永磁同步电机的零低速高频方波注入、中高速模型参考自适应位置观测器、零低速与中高速之间的平滑切换、中高速下带速重投等功能,最终取得了全速范围高动态性能、高稳态精度无位置传感器控制,实验结果表明所提策略的有效性。
所设计控制器性能优越、成本低、可靠性高,对提升永磁同步电机在工业驱动、航空航天、汽车电子、家用电器等领域的应用,具有重要的应用价值。
-
CW32F030C8T7永磁同步电机无感FOC控制的方案2025-12-03 304
-
FOC算法的永磁同步电机控制器的设计与验证2025-03-07 3599
-
GD电机驱动底层配置—永磁同步电机控制2022-10-13 5161
-
永磁同步电机控制器有何功能2021-08-27 1902
-
基于微控制器的永磁同步电机磁场定向控制2021-06-30 1787
-
永磁同步电机的自抗扰控制器调整技术2021-06-19 1108
-
基于DSP的永磁同步电机磁场定向控制器2021-05-12 1656
-
怎么设计永磁同步电机控制器?2019-08-14 3058
-
单片机的永磁同步电机控制2018-01-30 1585
-
永磁同步电机负载扰动控制器设计2016-05-04 668
-
基于等价输入干扰估计器的永磁同步电机控制器的设计与实现2016-04-26 676
-
QEP控制的永磁同步电机2015-10-30 1226
-
基于混沌同步的永磁同步电机控制2010-11-22 650
-
利用FPGA的永磁同步电机控制器原理及设计2010-03-17 3976
全部0条评论

快来发表一下你的评论吧 !
