

ROS是如何设计的 ROS客户端库
描述
实现通信的代码在ros_comm包中,如下。
其中clients文件夹一共有127个文件,看来是最大的包了。
现在我们来到了ROS最核心的地带。
客户端这个名词出现的有些突然,一个机器人操作系统里为什么需要客户端。
原因是,节点与主节点master之间的关系是client/server,这时每个节点都是一个客户端(client),而master自然就是服务器端(server)。
那客户端库(client libraries)是干什么的?就是为实现节点之间通信的。
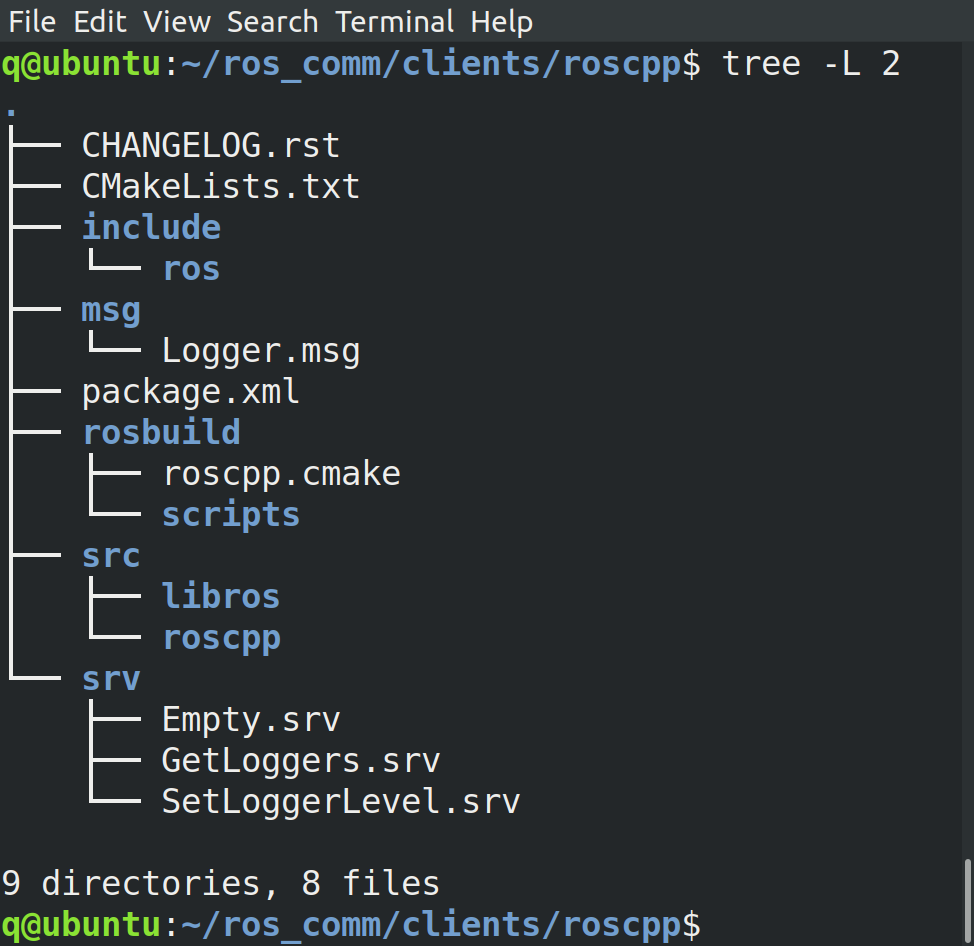
虽然整个文件夹中包含的文件众多,但是我们如果按照一定的脉络来分析就不会眼花缭乱。
节点之间最主要的通信方式就是基于消息的。为了实现这个目的,需要三个步骤,如下。
弄明白这三个步骤就明白ROS的工作方式了。这三个步骤看起来是比较合乎逻辑的,并不奇怪。
消息的发布者和订阅者(即消息的接收方)建立连接;
发布者向话题发布消息,订阅者在话题上接收消息,将消息保存在回调函数队列中;
调用回调函数队列中的回调函数处理消息。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ros的基本概念是什么2023-11-27 3248
-
ROS的扩展有哪些方法2023-11-21 1597
-
Unity与ROS链接介绍2023-11-17 2696
-
如何初始化ROS并创立链接2023-11-15 1516
-
ROS中的序列化实现2023-09-14 1975
-
深度解析开源无人机ROS开发方案2022-07-08 3419
-
你知道ROS客户端Client的编程该怎样去编写吗2022-02-14 1001
-
ROS与STM32通信2021-12-24 1242
-
什么是ROS?ROS产生、发展和壮大的原因和意义2021-12-17 2152
-
什么是ROS?如何学习ROS?2021-11-11 1561
-
做ROS与树莓派进行通信2021-09-06 1697
-
ROS与STM32是如何进行通信的2021-08-11 2094
-
在Android中使用ROS2021-05-16 5489
-
基于FreeRTOS的micro(微型)ROS2020-09-25 3502
全部0条评论

快来发表一下你的评论吧 !
