

FMCW毫米波雷达的基本原理
描述
1、简介
毫米波雷达的优点是角分辨率高、频带宽因而有利于采用脉冲压缩技术、多普勒颇移大和系统的体积小。目前笔者接触到的有24G毫米波雷达和77G毫米波雷达。
24G毫米波雷达主要应用在交通领域的测距和车辆测速,在其他领域也有使用24G毫米波雷达。
77G毫米波雷达主要应用在无人驾驶,汽车周围的目标检测等领域。
在首次接触雷达时,一头雾水。搞不清一个chirp的时域图和频域图的关系、中频信号以及其他名词的基本概念。在TI培训官网上看到一些毫米波雷达原理的视频才豁然开朗。TI培训官网毫米波传感介绍
本文主要是通俗易通的讲解笔者理解的FMCW毫米波雷达。在学习之前我们想想一下几个问题:
- 雷达如何检测目标距离的?
- 如果存在多个目标如何处理?
- 雷达检测目标的最小距离是多少?
- 什么因素决定了雷达的最大检测距离?
2、FMCW毫米波雷达的基本理解(单目标)
为了方便对FMCW毫米波雷达工作原理的基本理解,本节采用单目标进行理论分析。
2.1、什么是一个chirp?
FMCW雷达发射的一个信号称为chirp。一个chirp是正弦曲线,其频率随时间线性增加。
幅度与时间的关系和频率与时间的关系如下图:
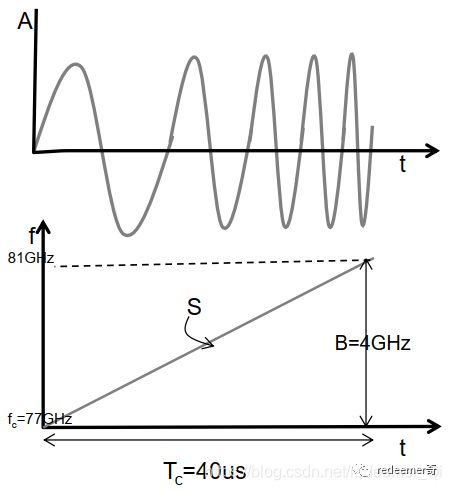
A-t和f-t
- 通常我们使用频率和时间的关系图(f-t图)来讨论一个chirp ;
- 一个chirp的特征包含起始频率(fc),带宽(B)和持续时间(Tc);
- chirp的斜率定义了带宽上升的速率。在此示例中,线性调频脉冲在40us内扫描4GHz的带宽,这对应100MHz/us的斜率。
2.2、雷达工作的基本流程(中频信号的由来)
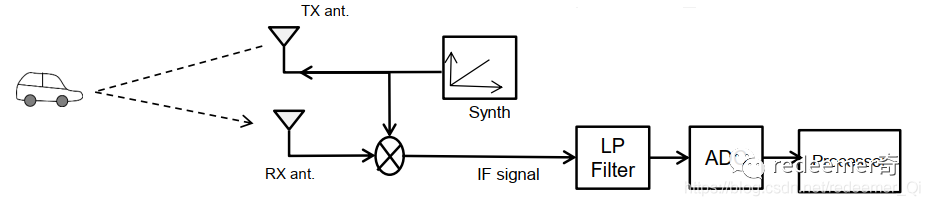
以一发一收的雷达为例,如下图:
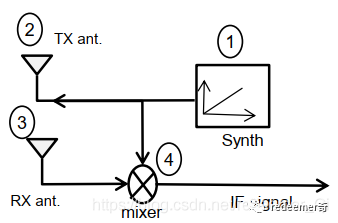
1T1R
- 混频器①生成一个chirp;
- 发送天线TX②将一个chirp发送出去;
- 当chirp接触到目标后,反射回来到接收天线RX上;
- 将RX信号和TX信号进行“ 混合 ”得到中频信号(IF)。
什么是 混合 ?
一个混合器具有2个输入和1个输出的3个端口设备。如图:
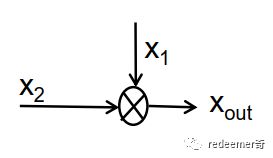
混合器
出于我们的目的,可以对混合器进行如下建模。
- 在两个输入端口上输入的两个正弦曲线x1和x2;
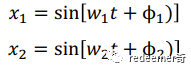
- 输出是具有以下条件的正弦曲线:
 特点:
特点:
(1)、瞬时频率等于两个输入正弦波的瞬时频率之差;
(2)、相位等于两个输入正弦波的相位差

 特点:
特点:2.2、中频信号(IF)的理解
使用f-t图理解中频信号,如下图:
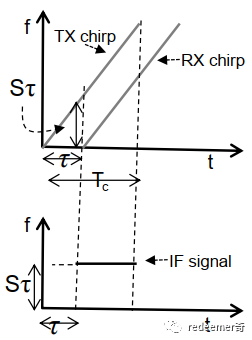
中频信号
说明:
- 上图反应了从目标反射的TX信号和RX信号的时频关系。请注意,RX信号只是TX信号的延迟版本。
(1)、τ表示雷达与物体之间的往返时间。
(2)、S表示chirp的斜率。 - 混频器输出的中频信号的频率是TX-chirp和RX-chirp瞬时频率之差。如上图所示这是一条直线。
- 因此,雷达前的单个目标物体会产生一个恒定频率的IF信号。这个频率Sτ,其中τ = 2d/c。因此:
 其中,d是物体的距离,c是光速。
其中,d是物体的距离,c是光速。
 其中,d是物体的距离,c是光速。
其中,d是物体的距离,c是光速。注意:τ通常只占总线性调频时间的一小部分=> TX线性调频的非重叠部分通常可以忽略不计。
例如。对于最大距离为300m且Tc = 40us的雷达。τ/ Tc = 5%
因此,通过对中频信号IF做FFT变换,找出功率最大的频率即可。但是在实际使用中雷达前方不可能仅仅只有一个目标,因此,存在多目标的情况如何处理?
3、多目标距离分析
由第二节可知,单目标对应一个RX,则多目标会存在多个RX,如下图:
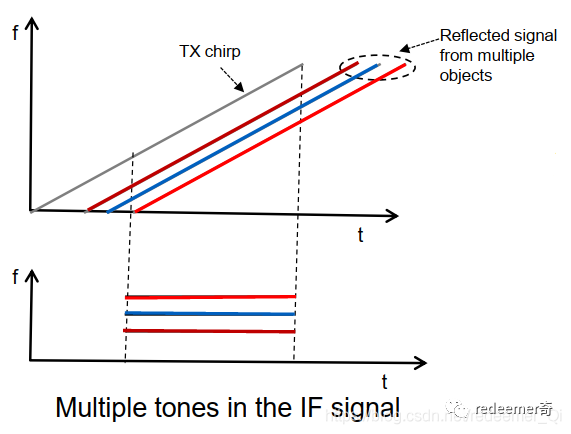
多目标
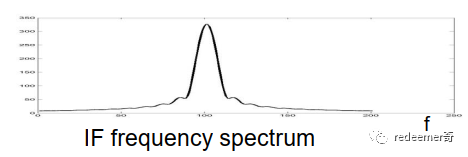
中频信号的频谱将显示多个峰值,每个峰值的频率与雷达上每个物体的距离成比例,如下图: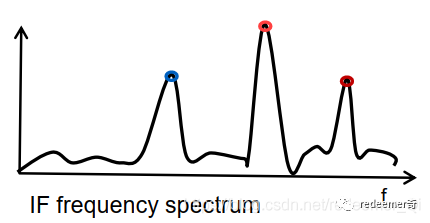
多目标频谱图
因此,多目标也是比较容易理解的。重点来了,如果两个目标相距比较近,导致两个目标在频谱图中仅显示一个峰值怎么解决?
3.1、多目标的距离分辨率问题
雷达的距离分辨率可以间接表示探测目标之间的最小距离。小于这个最小距离,在算法分析中便认为是单个目标。
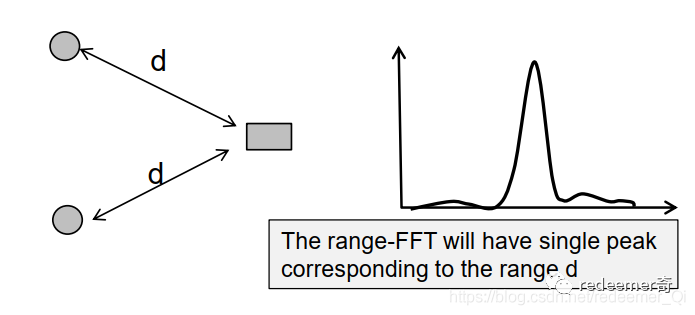
两个距离相近的目标的图像如下:
相近目标时频和时幅图
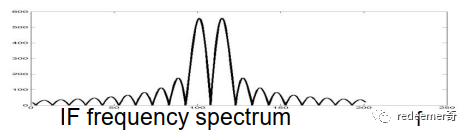
频谱图
在算法分析中是不能分辨这两个目标的,如何解决呢?
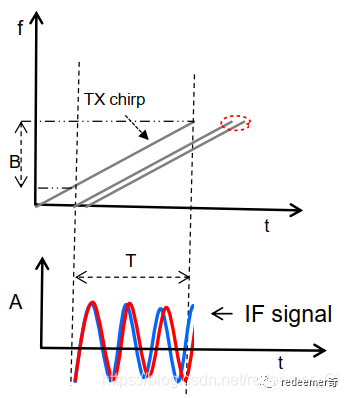
可以通过增加中频信号IF的长度来解决这个问题。如下图:
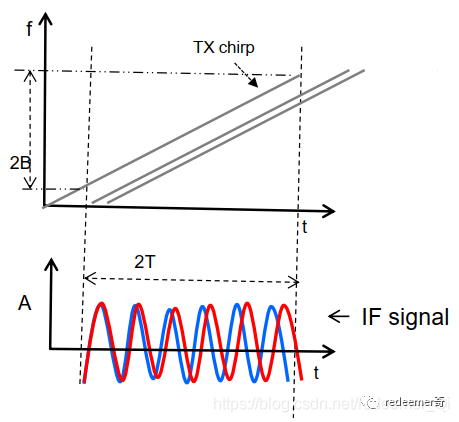
增加IF长度
频谱
从图中可以看出增加一个chirp的发射周期,即增加中频信号的长度,但是相应的带宽从B增加到2B。
因此,增加中频信号的长度,会成比例的增加带宽。即: 更大的带宽等于更好的分辨率 。
3.2、距离分辨率的推导
回顾一下之前的内容:
- 距离为d的物体会产生S2d / c频率的IF峰值;
- 只要频率差Δf> 1 / T,就可以分辨两个峰值。
因此,对于两个相距距离Δd的物体,它们的IF频率之差为Δf=S2Δd/ c。由于一个chirp的周期为Tc,这意味着:

即:距离分辨率△d仅取决于线性调频脉冲扫过的带宽
3.3、雷达的最大检测距离
由3.2小结的公式:
可推导出: 即中频信号的带宽取决于所需的最大距离。由于IF信号通常经过数字化处理(LPF + ADC),以便在DSP上进行进一步处理。因此,因此,IF带宽受到ADC采样率(Fs)的限制,即: {max}}{c}Fs≥cS2△dmax
即中频信号的带宽取决于所需的最大距离。由于IF信号通常经过数字化处理(LPF + ADC),以便在DSP上进行进一步处理。因此,因此,IF带宽受到ADC采样率(Fs)的限制,即: {max}}{c}Fs≥cS2△dmax
故ADC的Fs采样率将雷达的最大范围限制为:
如下两个示例A和B的距离分辨率谁大谁小?
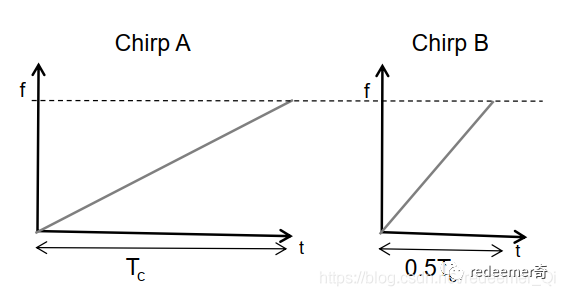
A和B
说明:
A和B具有相同的分辨率,但是:
- 对于相同的dmax,线性调频A仅需要一半的IF带宽(=> ADC上较小的Fs)。
- 但是Chirp B的优势是需要一半的测量时间。
因此Chirp A方案,在获得同样的最大测距性能,允许比Chirp B方案更小的ADC采样时间,平衡硬件性能依赖。
4、总结
雷达的测距的工作流程如下:
测距流程
- 合成器产生一个chirp ;
- chirp通过TX天线发送,被目标返回。通过RX天线接收此chirp,即得到一个延时的chirp;
- 将TX发送的chirp和RX接收的chirp混合成中频信号IF;
- 对IF依据奈奎斯特采样定理进行ADC采样,必须支持S2dmax / c的IF带宽。
- 对ADC数据进行FFT变换,得到频域信号,其中频谱包含多个峰值,每个峰值的频率(f)与相应物体的距离(d)成正比。
5、疑问
雷达探测等距离的目标物体,在频谱图上峰值是重叠的,如何进行区分?
思考
事实证明,如果两个物体相对于雷达具有不同的速度,则可以通过进一步的信号处理将这些物体分离出来。我们将在下一篇文章中进行分析!
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2358
-
漫谈车载毫米波雷达历史2022-03-09 12123
-
雷达传感器模块,智能存在感应方案,毫米波雷达工作原理2021-10-28 4076
-
毫米波雷达工作原理,雷达感应模块技术,有什么优势呢?2021-09-22 2895
-
使用毫米波雷达进行生命体征监测2021-09-02 6506
-
毫米波雷达的特点是什么2021-07-30 7411
-
毫米波雷达(一)2019-12-16 15052
-
车载毫米波雷达的原理是什么?2019-08-07 7689
-
毫米波传感介绍:FMCW雷达系统设计的相关讨论2019-05-10 4918
-
毫米波传感介绍:如何估计FMCW雷达的角度?2018-08-17 8039
-
毫米波雷达方案对比2018-08-04 12514
-
毫米波传感介绍:FMCW雷达如何估计物体速度2018-08-02 6804
-
一文读懂毫米波雷达测方位原理及优势2018-04-24 35262
全部0条评论

快来发表一下你的评论吧 !
