

24G毫米波雷达测速原理详解
描述
1、概述
24G毫米波雷达是一款利用高频微波多普勒(Doppler)效应(用于精确测量速度) 和调频连续(FMCW)波(用于精确测量距离)高科技智能交通类产品。
2、测速原理
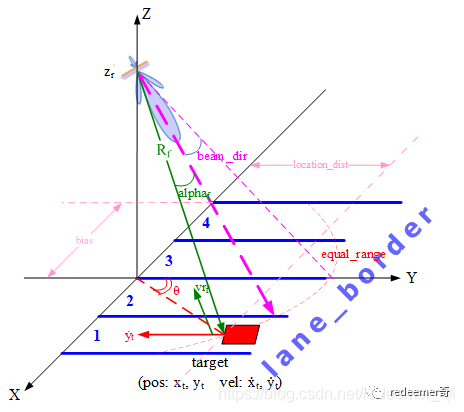
24G毫米波雷达覆盖道路的探测区域为狭窄的辐射场型,其在道路上的一个狭窄的探测投影区,可监控向来或离去车辆,如探测区域内出现目标时, 24G毫米波雷达通过信号处理部分往外部设备输出发送电压脉冲信号(触发信号), 对应的车辆所在的位置会在±1m 的狭窄的探测区域之内,同时会给出所检测到车辆速度和车型信息。
在监控向来的车辆时,车辆进入探测区域的时刻, 24G毫米波雷达通过信号处理部分输出开始触发信号,同时输出具有相同作用的电压脉冲信号;
车辆离开探测区域时刻, 24G毫米波雷达通过信号处理部分输出结束触发信号,同时脉冲电压下降。
输出结束触发信号之后,输出被测车速和车型信息。这种工作模式保证触发信号和速度值属于同一辆车,因此基于 24G毫米波雷达机动车超速抓拍雷达开发的测速抓拍取证系统具备正确度趋于 100%的抓拍能力。
3、算法原理
基于1T2R(一发两收)的雷达,该雷达采用锯齿波(Fast Chirp)工作模式,每一个Frame只有一种发射波形。该算法流程主要分为三大部分:
- 信号处理部分
- 数据处理部分
- 应用相关的部分。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
干货!纳雷科技总经理谈基于24GHz毫米波雷达传感器的配置方案2016-07-22 94719
-
毫米波雷达方案对比2018-08-04 12488
-
车载毫米波雷达的技术原理与发展2019-05-10 6214
-
车载毫米波雷达的原理是什么?2019-08-07 7654
-
毫米波雷达(一)2019-12-16 15004
-
毫米波雷达77GHZ 79HGZ PBT透波材料 汽车ACC,无人机 ,道砸 防砸系统2020-11-27 6643
-
毫米波雷达的特点是什么2021-07-30 7389
-
漫谈车载毫米波雷达历史2022-03-09 12084
-
英飞凌的24G毫米波雷达开发板Distance2GO如何开发2022-06-26 1839
-
ADAS系统无人驾驶的眼睛毫米波雷达2023-04-18 2332
-
毫米波雷达的工作原理及优缺点介绍2018-04-24 97245
-
毫米波雷达的频率_毫米波雷达的应用2020-07-24 12444
-
FMCW毫米波雷达的基本原理2023-09-15 7122
-
24G人在感应雷达和24G目标轨迹跟踪雷达的区别2025-08-19 1725
-
2025年深圳国际物联网展|觅感科技24G毫米波雷达模组成焦点2025-08-29 2143
全部0条评论

快来发表一下你的评论吧 !
