

地面控制站和系统技术实现原理
电子说
描述
地面控制站 (GCS) 是允许无人机无人系统、无人水面车辆 (USV) 和无人地面车辆 (UGV) 从远程位置操作并与控制进行通信和控制的硬件和软件。这可以通过设置自主操作的参数或允许直接控制无人驾驶车辆来实现。
地面控制站(GCS)通常位于作战区或战场区域或附近,也可以位于单独的受控基地。他们执行的惊人壮举是由复杂的地面控制站控制和监控的,有时距离飞机飞行的地方数千英里。
无人驾驶车辆是一个巨大的优势,它们对于提供监视,侦察和精确打击能力至关重要。无论是天空还是地面,无人驾驶车辆都在战场上以及国内增长,供执法,天气监测和NASA用于研究。
GCS如何工作
地面控制站基于处理单元,处理单元可以是具有高性能处理器的计算机,也可以是基于嵌入式计算平台的定制系统。
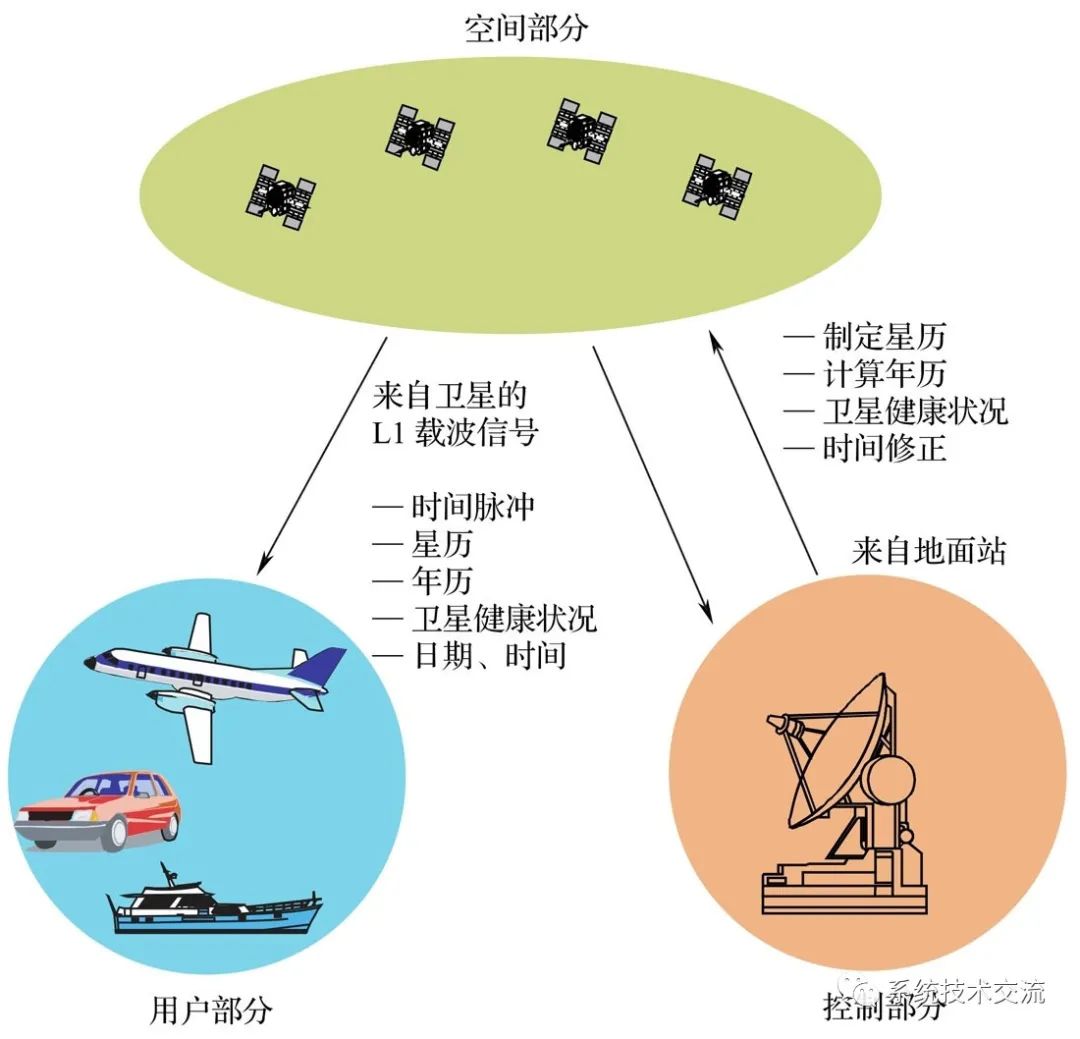
无线数据链路子系统提供与无人驾驶车辆的远程通信。遥测数据、命令和传感器数据(如视频、图像和测量值)可能需要在无人驾驶车辆和 GCS 之间传输。通信方法包括模拟和数字无线电以及蜂窝通信,工作范围可达数百公里。
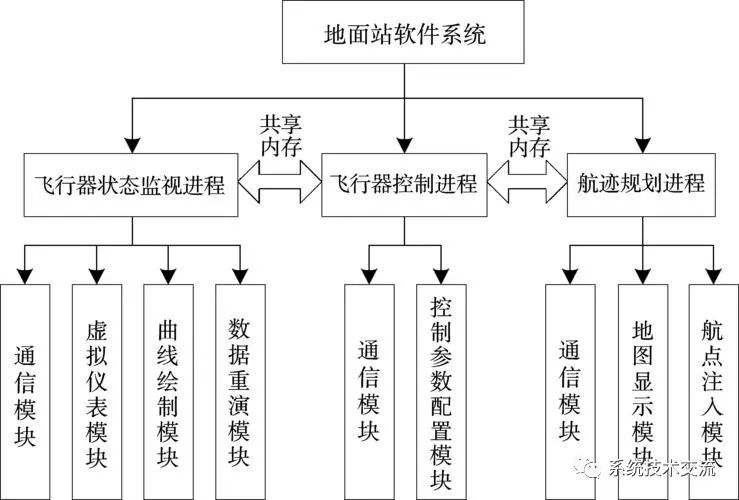
GCS将具有一个或多个屏幕,这些屏幕可能具有高亮度或防眩光结构,以便在明亮的日光下更容易操作。GCS GUI可以显示地图屏幕,仪表叠加层,相机有效载荷馈送,飞行参数和各种其他信息。无线数据链路将与无人驾驶车辆上的控制模块通信,该模块将调整转子,油门和GCS内置的控制系统可能包括飞机和/或有效载荷的操纵杆,油门控制器以及键盘和鼠标。
地面控制站作为网络枢纽
地面控制站在无人机中起着核心作用,GCS充当无人驾驶飞机有效载荷产生的情报,监视和侦察(ISR)数据的枢纽。
传感器生成的视频和其他数据通过数据链路下载到GCS,然后这些信息 - 近乎实时 - 被传播给战场部队,其他机构等。这些相同的组还可以向GCS发送信息以上传到飞机 - 例如提供无人驾驶车辆的特定坐标或对新目标进行打击。
典型的地面控制站有两个控制台 - 一个用于飞机操作员,另一个用于有效载荷操作员。飞行员可以在没有操纵杆的情况下完全控制飞机,他可以使用鼠标和键盘命令更改紫外线,因为机载计算机实际上是在操纵控制面。任务计划是预先加载的,因此可以想象飞机操作员可以坐下来监控他的移动地图显示,而不会中断任务。
但是,这种情况很少发生,因为没有任务可以完全预测。自主程度或飞行员互动通常取决于任务与任务的基础。他指出,大多数情况下,无人机操作员是前任或现任飞行员,因此他们接受空中交通管制操作和飞行动力学方面的培训。
飞行员通常使用两个任务显示器 - 普通飞行员驾驶舱显示器和路线或地图显示器。他还启动并运行了至少两个其他显示器,显示多个聊天室。传感器操作员还有两个显示器 - 一个显示传感器状态,另一个显示飞行路线,就像飞行员一样,还有两个用于聊天室的监视器。
通用地面控制站有一名飞行员/无人驾驶车辆操作员和一名有效载荷操作员,他们处理来自ISR传感器,电光学和Lynx合成孔径雷达(SAR)的所有情报,并与战场网络上的其他人接口。这使飞行员和有效载荷操作员具有态势感知能力。GCS操作员还使用高清显示器。
有效载荷控制
过去,有效载荷操作员将接受培训,以处理计算机系统的基础知识,并将来自无人驾驶车辆的传入情报转发给情报分析师,指挥中心,现场部队进行分析。现在有一种趋势是让有效载荷操作员接受情报分析员的培训,这样,如果他看到需要立即利用的关键事情,并“提醒战场上的部队以及分析中心的时间敏感目标,节省时间。
有效载荷操作员通过在线聊天室与网络中的其他人进行通信,类似于许多消费者在其家用计算机上使用的即时消息服务。
例如,UV的电光系统可能正在通过喀布尔跟踪***或其他目标,并且此人可能接触到其他机构可能一直在跟踪的红色车辆或其他物体,因此操作员将其传递给聊天室中的其他人,例如空中作战中心(AOC),以便在其他任务中可能被利用, 他继续说道。
Ames说,这些图像和传感器数据将由有效载荷操作员传播到广域网(WAN),某些部门或机构的情报分析师可能会将感兴趣的人或其他目标识别为他们可能在单独的独立任务中寻找的数据。
这是一种分布式态势感知的形式——改善无人机操作员、地面部队、情报分析师等的战场画面。- 而且近乎实时,Ames说。
先进的多通道雷达(AMR)是最新的SAR系统,为GCS操作员和战场网络提供有关下车目标的信息。
能够检测和跟踪大面积的下马和缓慢移动的车辆,并将车载视频传感器交叉提示到感兴趣的区域,是一项新兴的军事和民用监视要求。
来自长航时无人机的持续情报流使操作员能够近乎实时地将其提供给世界各地的分析师和机构。
船上地面控制站
加利福尼亚州圣地亚哥诺斯罗普·格鲁曼航空航天系统的Fire Scout无人直升机拥有基于地面和船上的控制站 地面站和船上站之间的主要区别在于,船上控制插入船舶的通信网络,而地面控制站使用诺斯罗普·格鲁曼公司的通信系统。Fire Scout的舰载控制站位于单独的目标照明雷达(STIR)所在的房间内,并通过内部通信系统直接与船舶的空中交通管制进行通信,而地面部分使用无线电与空中交通管制进行通信。 罗伯茨说,Fire Scout有效载荷操作员控制激光测距仪等传感器的不同功能,并通过无线电通信和其他通信系统与地面部队,海军舰艇和海岸警卫队通过船舶传达情报。 罗伯茨说,在海上驾驶自主无人直升机最困难的任务是在大风天将飞机降落在一个移动的目标上。他补充说,在任务结束时,它将悬停在船后,等待来自船的信号着陆,并使用其仪器确定船的速度及其俯仰/滚动和在水中的位置,以进行适当的甲板着陆。 他继续说道,Fire Scout使用一种称为无人机通用自动恢复系统(UCARS)的系统,该系统将“鱼叉”射入甲板上直径7英尺的位置的孔中。一旦鱼叉接合并且甲板传感器拾取飞机的重量,机组人员就会出来并将其链条固定下来。罗伯茨说,如果着陆的任何步骤(鱼叉或重量传感器)发生故障,着陆可能会中止,整个着陆过程都会受到控制站的监控。
消防侦察兵控制站上的 COTS 集成
罗伯茨说,消防侦察兵控制站使用COTS电子设备。他补充说,对于控制计算机,他们使用运行Sun Microsystems的Solaris操作系统的Themis Computer RES-32系统。
Themis RES-32s采用三机架单元机箱,使用Sun Microsystems 1.28GHz UltraSPARC IIIi处理器,具有XVR-1200高性能显卡,可实现3D图形性能,Themis官员说。公司官员说,RES-32可以通过添加Sun或其他商用现成的网卡,I / O,外围设备和其他增值设备轻松扩展。
人为因素
在设计下一代控制站时,操作员有很多投入。大屏幕显示——飞机操作员和任务有效载荷操作员各有两个屏幕,一个16×9宽高比的高分辨率大屏幕。
便携式无人驾驶车辆控制站
小型便携式紫外线控制器是简单易用的系统,可在五分钟内从装在作战人员背上的背包中的系统转换为可操作系统。
当子弹飞来飞去时,操作员需要系统简单易懂,数据易于理解。这些单位的操作员不需要飞行员培训,他们是特种部队操作员或海军陆战队的小单位的一部分,单位中的每个人都接受过交叉训练。
Newbern说,一名操作员使用控制器单元控制无人驾驶车辆,该控制器单元由来自摄像头的显示流视频和用于控制飞机的旋钮/转盘组成。他补充说,另一名操作员使用笔记本电脑收集从飞机下载的情报数据,进行分析并传播到战场网络中的其他节点。
整个地面控制系统(GCS)可以装在战斗机的褶皱袋中携带。没有笔记本电脑的GCS不到8磅。
可以想象它可以由一个人操作,但两个操作员是首选方法。GCS还可以嵌入到远程位置,作为监控的指挥中心提供与现场操作员相同的有效载荷监控功能。
随着军事和商业部门对无人系统需求的增加,预计对地面控制站的需求将上升。对边境监控日益增长的需求也将进一步推动市场。预计GCS服务将成为推动军用GCS市场的主要因素之一,因为大多数GCS的尺寸较大,并且由于其运行的恶劣环境而需要定期维护。另一方面,整合地面控制站以控制多个无人驾驶车辆是地面控制站市场的主要制约因素之一。
根据系统,软件部门估计在预测期内将以更高的速度增长。软件部分包括GCS用于操作无人系统及其有效载荷的软件。随着无人系统应用的增加,对附加功能的需求也将上升,预计将推动GCS市场。 根据服务,集成部分估计将在2017年主导地面控制站市场。这种主导地位主要归因于由于无人机应用的增加和模块化系统的快速发展,对添加新功能的需求。
编辑:黄飞
-
无人机地面控制站的现状及发展综述2023-05-06 5122
-
地面控制站无人机开源分享2022-12-05 1434
-
无人机地面站提升无人机作业效率及智能易用性2020-11-11 2869
-
无人系统和地面控制站的加密数据链路的演示2019-06-27 2896
-
四旋翼无人机地面站控制软件2018-01-08 1528
-
河南思科测控出口项目成套阀门控制站完工2017-12-01 3092
-
基于MFC的无人机地面站综合检测台设计2017-11-16 1150
-
基于无人机地面控制系统的飞行预检设计2017-11-15 903
-
【Tisan物联网申请】石油开采系统监视控制站设计2015-11-06 2251
-
用LabVIEW做飞行器地面控制站2013-05-12 3401
-
基于uCOS的无人机仿真系统设计与实现2010-01-25 858
-
DCS现场控制站的设计与实现2009-08-25 734
-
卫星地面站计算机监控系统2009-06-27 647
全部0条评论

快来发表一下你的评论吧 !
