

基于树莓派的交互机器人设计
描述
今天小编给大家带来的是加拿大Maker Levent Erenler 的DOLY robot的机器人项目,该项目基于树莓派CM4(Raspberry Pi Compute Module 4)打造,集人脸识别、语音识别、物体识别、桌面助手、移动监控于一身,可以作为学习开发平台使用模块化编程。
材料清单
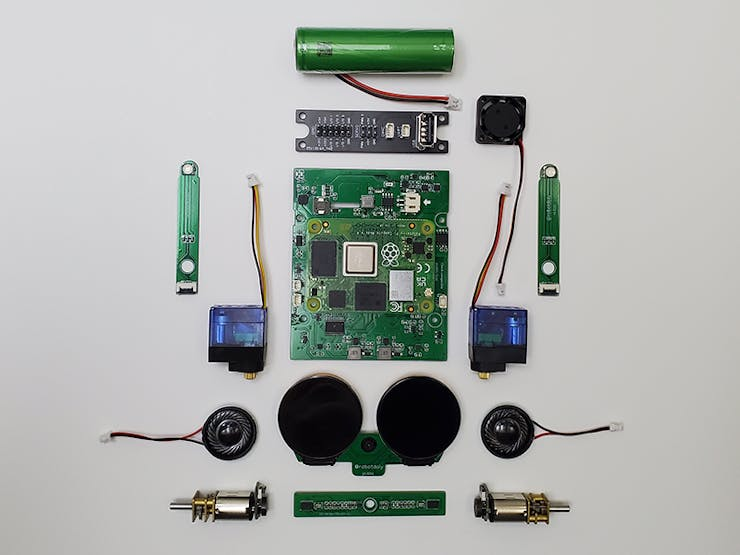
硬件:
Raspberry PI Computer Module 4
8兆像素索尼IMX219摄像头
触摸传感器 * 2
6轴IMU传感器
TOF 传感器 * 2
红外边缘传感器 *4
麦克风 * 2
扬声器 * 2
9克舵机 * 2
直流编码器电机 * 2
圆形LCD屏幕 * 2
18650电池 *1
其他:
3D打印的机器人外壳
3D打印的TPU机器人履带
STEP 1 - 3D打印
所有的3D打印文件都可以在GitHup找到,文件中有两种打印文件,以“FDM”开头的文件需要 FDM 3D 打印机。以“SLA”开头的文件需要 SLA 3D 打印机。打印文件下载地址https://github.com/robotdoly/DOLY-DIY/tree/main/STL
使用 PLA 打印很容易,但我建议为底盖打印 PETG 或 ABS 等耐热丝,这样可以提升Doly robot的整体强度,质感也会更好
手部的打印结构优先选用半透明的树脂材料打印,这样手灯效果会更好
采用 NinjaFlex 85A TPU 打印的轨道
STEP 2 - 准备零件
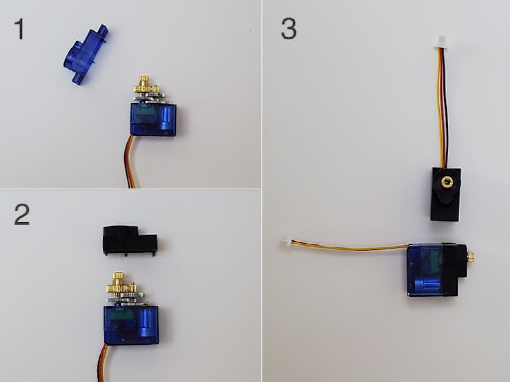
舵机改装:
取下底盖
重新焊装舵机线,长度预留6厘米
装回底盖
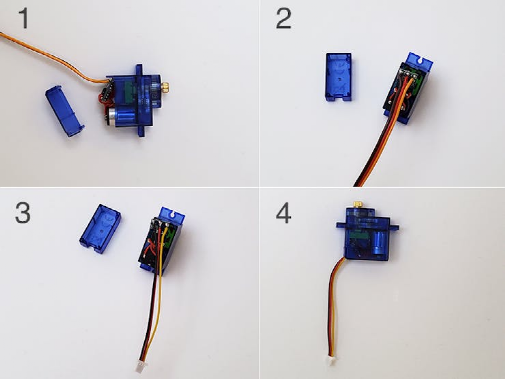
更换光固化的打印的舵机顶盖
充电接口制作
*按 1:1 比例打印随附的连接器图;
*用双面胶带将打印纸粘贴到铜片上;
*切割图纸区域;
*如图所示弯曲边缘;
*撕掉胶带和纸;
STEP 3 - 电子元件
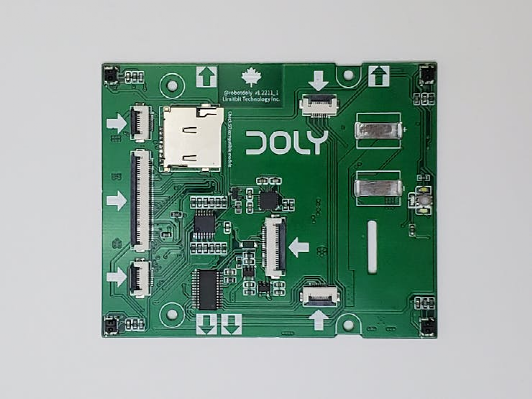
PCB板设计
如果您想自己动手,可以从链接访问原理图、Gerber 文件和 BOM 文件。
将电子元件放置在 PCB 上后,您必须借助 3D 打印对准器将 LCD 与 Eye PCB 对齐,该对准器位于“LCD_aligner.STL”排插接口中。
* 将Eye PCB 放入对准器中,如图所示。
* 使用双面胶带将 LCD 粘合到 PCB 上。
* 取下 LCD 塑料盖。
* 应用屏幕保护玻璃。




STEP 4 - 组装
本视频系列将向您展示如何组装 DIY Doly 机器人。
STEP 5 - 充电器组装
3D打印零件
充电器组装
打印完 3D 零件后,您将需要组装充电器板。原理图和组件列表 (BOM) 位于此链接。
当所有 3D 打印部件准备就绪后,
小心地在顶面和底面涂上胶水。
确保胶水远离边缘。
确保零件正确对齐。
将顶部固定到底部。
几分钟后安装充电器模块并用四颗螺钉固定底盖。
软件
您可以在此链接中找到包含驱动程序、模块和库的预编译内核映像。
我正在研究示例来演示如何控制和访问功能,但是您可以在此处找到一些 C++ 示例。
与 Picovoice 进行语音交互。
审核编辑:汤梓红
-
能够精准定位的树莓派机器人!2025-05-17 1784
-
基于树莓派的四足喷水机器人设计2024-01-22 3684
-
基于树莓派的机器人设计方案2023-10-19 1735
-
树莓派机器人船构建2023-07-10 922
-
基于树莓派的语音智障机器人设计jf_06209345 2022-07-24
-
如何使用树莓派开发智能机器人控制系统2021-12-23 4826
-
基于SLAM的移动机器人设计2021-11-08 3253
-
基于树莓派的监控机器人设计2020-12-25 3190
-
【orangepi zero申请】基于香橙pi的机器人设计2016-12-08 4640
-
树莓派语音识别机器人(下)2016-01-20 34468
-
有关树莓派制作机器人平台的探索2015-11-10 4503
-
树莓派打造视频监控机器人Verybot2014-09-18 112840
-
变形乐高玩具变形和树莓派一起玩出乐高机器人!2014-09-02 11906
-
[分享]LabVIEW 与机器人设计2009-05-30 9242
全部0条评论

快来发表一下你的评论吧 !
