

基于英特尔开发套件使用ORB-SLAM3实现无人机实时定位
描述
作者:上海大风技术有限公司 余力
01大风无人机简介
大风无人机是上海大风技术有限公司自主研发的桥梁巡检无人机,旨在为客户提供:
一站式的无人机桥检解决方案,克服无 GPS 信号时的无人机定位精度问题
高分辨率且准确的桥梁与城市建模
目前大风无人机已为多位客户提供高分辨率模型,包括桥梁、建筑物、道路等,为无人机在工业细分领域的应用提供优质方案。
02双目视觉与 IMU 融合 SLAM 技术简介
工业建模对于精度有着高要求,这意味着无人机的 SLAM 算法要提供可靠的实时位姿估计。ORB-SLAM3 是目前融合双目视觉与 IMU 的优秀算法,其前端是针对实时性优化的 ORB 描述子与关键帧的提取算法,后端是局部地图的维护、闭环矫正与全局地图的更新。在 TUM 数据集测试中,其最高精度可达 1cm。我司基于该框架研发算法,实现双目视觉与 IMU 数据的融合,精准计算位移距离并给出可靠的实时位姿,使得无人机在无 GPS 的情况下进行实时定位成为可能,并能被应用于各种无 GPS 场景下的自主飞行与建模。
ORB-SLAM3 在上一代的基础上优化了以下方面:
融合视觉信息和 IMU 数据,提高了位姿估计的稳定性与精度
对闭环检测增加了关键帧时序连续性要求,保证了闭环的精度
设置了活跃与非活跃地图,支持多地图的建立与融合
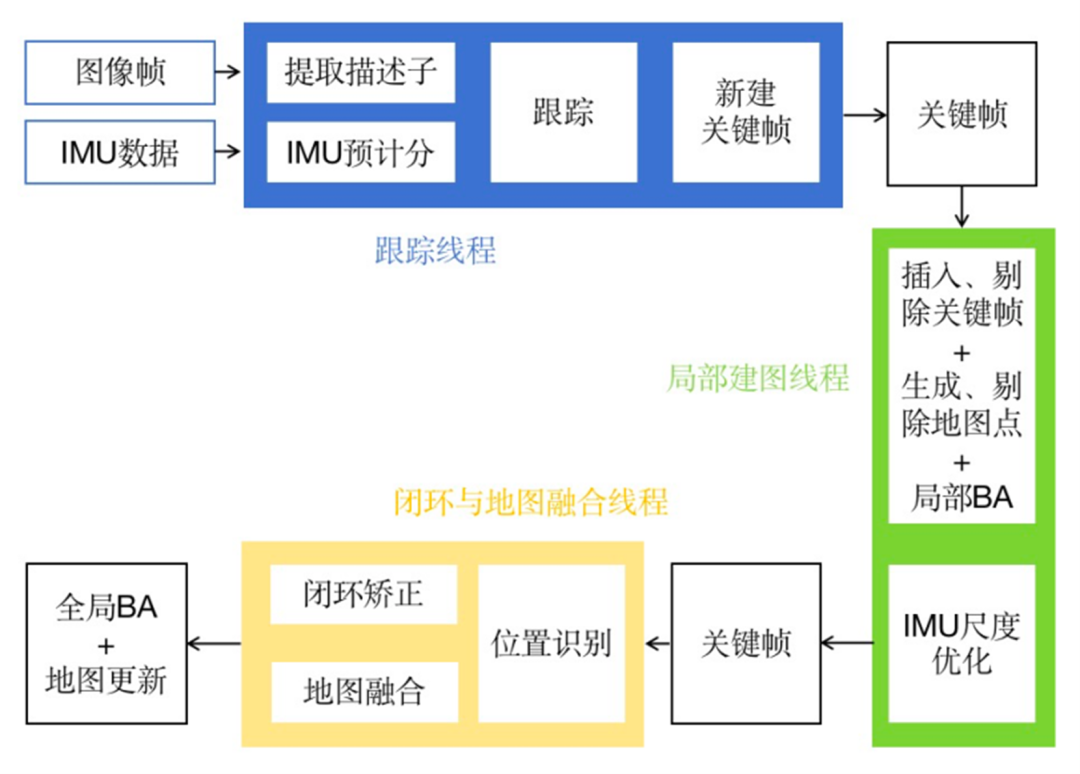
图 . SLAM 算法框架图
03使用英特尔 CPU 作为机载算力核心的优势
大风无人机使用英特尔 CPU 作为机载算力核心,是因为 x86 + Linux 的软件生态非常强大,支持多种市场上已有的软件和硬件组件,易于快速构建软件系统,提升开发效率,同时还有强大的可扩展性和可维护性。
本文将介绍在英特尔 CPU 下运行 SLAM 算法的结果。
04SLAM 算法运行平台
机载电脑硬件:英特尔开发套件爱克斯开发板 AIxBoard
机载电脑系统:Ubuntu20.04.1
传感器:RealSense D435i
05SLAM 算法运行结果
在无人机巡检建模中,SLAM 算法需要提供可靠的位姿估计以知晓机体的位移和在地图中的位置,这需要跟踪线程尽可能快地处理传感器数据,即消息帧的处理频率要尽可能高。在本次测试中,我们在 AIxBoard 上运行了 SLAM 算法,在双目相机以约 30 Hz 的频率拍摄的情况下,追踪线程的平均处理速度能达到 29.69 Hz,说明可以程序可以稳定地处理所有到来的双目图像。
06总结与展望
我们在 AIxBoard 下使用双目视觉与 IMU 融合的 SLAM 算法,使无人机具备输出可靠位姿并准确移动规定距离的能力,为后续建立高分辨率与高精度模型提供可靠数据。
未来,大风无人机将支持更高性能的英特尔 CPU,实现在无 GPS 信号的场景中自主执行任务的目标。
公司简介
上海大风技术有限公司成立于 2019 年。致力于成为领先的无人机智能应用专家,专注于无人机在全新领域的探索与创新。
凭借自主研发的软硬件产品,为交通、物流、电力、建筑、应急、消防等行业提供革命性的整体解决方案。成立至今已取得各种发明专利、软件著作权 20 余项。
审核编辑:汤梓红
-
基于深度学习的增强版ORB-SLAM3详解2025-07-14 2182
-
ORB-SLAM3整体流程详解2023-06-19 6960
-
使用英特尔物联网商业开发套件改变世界2020-05-31 3113
-
用于无人机的英特尔Aero计算板和视觉配件套件简介2018-11-09 5103
-
英特尔®Shooting Star®无人机首登杂志封面2018-06-16 4708
-
英特尔的商用无人机一直引领着无人机领域2018-05-20 5086
-
大牛!英特尔发布面向开发者的全新无人机产品2018-04-24 976
-
英特尔强推RealSense技术在无人机领域应用2018-04-10 3023
-
关于英特尔CES无人机的相关内容2018-01-11 1571
-
英特尔的945GME高速芯片组开发套件2017-10-30 895
-
英特尔推无人机开发套件 内置视觉系统2017-02-10 1776
-
无人机掀风潮 英特尔扩展实力2016-11-16 838
-
英特尔推无人机新玩法:取代烟花2016-11-05 566
-
英特尔BOOT Loader开发套件-高级嵌入式开发基础2011-12-07 1026
全部0条评论

快来发表一下你的评论吧 !
