

MMWR到底是什么?雷达系统的基本工作原理图
RF/无线
描述
本系列文章为于振南老师的颠覆认知的“工业之眼”--毫米波雷达(MMWR)部分,本文内容为: MMWR原理真巧妙,十步以外检测风吹草动。
毫米波?也许你只在网上或新闻里有所耳闻,知道华为的5G基站使用了毫米波,或者知道特斯拉的自动驾驶有MMWR。其实前者是毫米波的通信应用,它使得通信带宽得到质的飞跃,为所谓的“大上行业务”应用提供了支撑(实时机器视觉就是最典型的“大上行”应用)。不过,本章并不讲毫米波的这种通信应用,而是侧重于后者,即在雷达方面的应用。
2021年前后,我的硬件团队一直在研发一个神奇的东西,就是太赫兹MMWR(THz MMWR)。应该说这项工作还是极具挑战的。我团队里有从英国名校留学回来的硬件工程师,精通高频模拟电路设计和无线系统仿真;另有工程师,包括我在内精通数字信号处理和嵌入式;这期间甚至还有位高权重的大佬(不便透露实名)参与关键部分的研发。即使这样,我们仍然感觉到了巨大的研发阻力。
太赫兹毫米雷达其实是MMWR的一个先进分支,或者说是新兴概念,它象征着最激进的MMWR技术。太赫兹MMWR的诸多优异特性使其成为了相关行业的聚焦点。
什么?MMWR到底是什么?它到底有多神奇?振南不再啰嗦,直接来看本章的内容。
正文
3、MMWR原理真巧妙
前面的历史和应用就花费了很大的篇幅。是时候展现真正硬货的时候了。
3.1 测量距离
3.1.1 测距原理
MMWR最最基本的功能就是测距。很多的应用场景其实都是由测距引申出来的。有一定研发工程经验的人就会知道,测距并不简单,高精度测距就更难。常见的测距方案有超声测距、激光测距,还有现在比较火的射频测距,比如UWB和BT5.0(它们都是基于TOF方法)。UWB是什么?超带宽,不要跑题。会有专门的章节去详细讲解UWB。
振南先给出雷达系统的基本工作原理图,如图18.16。
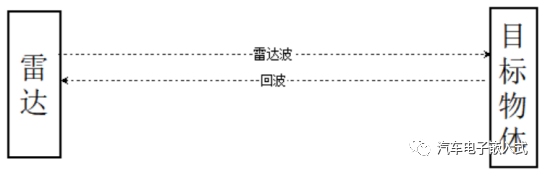
图18.16 雷达系统的基本工作原理图
雷达有发射天线和接收天线,它们分别负责电磁波的发射与接收(典型的废话,毫无信息量)。很多人可能会认为一发一收,那就是计算一下收发延时,乘以光速就行了。你说的这个是新兴的射频测距的原理,但并不是雷达的测距原理。
前方高能,作好准备。
1、FMCW(调频连续波)
FMCW(调频连续波),是指频率随着时间而连续变化的电磁波信号,如图18.17-8所示。
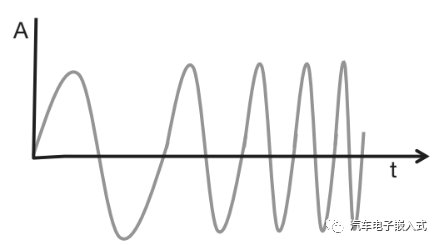
图18.17 FMCW(调频连续波)时域波形示意
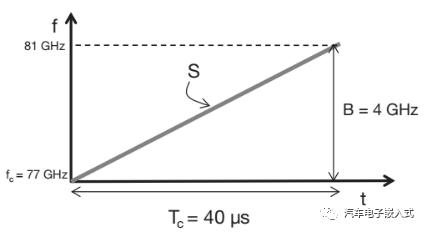
图18.18 线性调频脉冲信号(以77GHz毫米波信号为例,带宽是4GHz)
这里理解没有问题吧?OK,我们继续。
2、IF(中频信号)
我们设想一下,如果雷达以这种波形发射信号,然后信号遇到障碍物也会以这个波形反射回来,不同在于这一去一回的两个信号是有一定的延时差的,如图18.19。
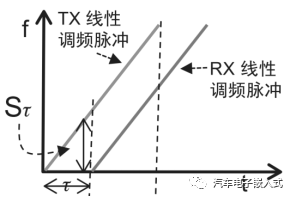
图18.19 线性调频脉冲发射与接收信号
此时,我们会发现因为这个延时差非常非常小(毫米波传播速度是光速),所以这两个信号会有一个重叠区域,即图18.19中虚线画出的部分。如果我们尝试对这两个信号作减法,我们会发现一个神奇的现象,如图18.20。
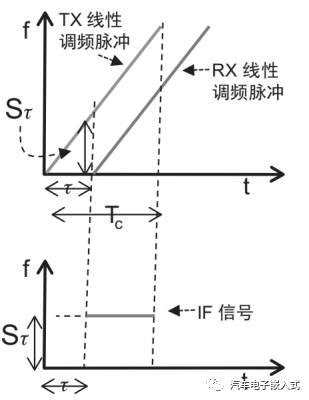
图18.20 中频IF信号的产生
对,我们会得到一个特定单一频率的信号,我们称之为IF,即中频信号。OK,我们进一步来想:这个IF信号的频率是由什么决定的?没错,两个信号的延时差。而延时差是由什么决定的?聪明,毫米波发射天线与目标物体的距离。这样是不是只要知道了IF信号的频率,也就知道了其所对应的距离了?
如果你能够理解这个,那恭喜你,你已经消化了MMWR的最基本原理。
“那IF信号应该是一个标准的正弦信号吧?”不是,实际的中频信号比较复杂,振南翻出了一个实际的中频信号给大家看一下,如图18.21。
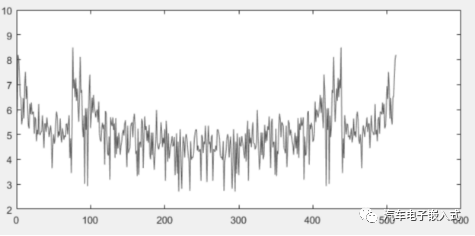
图18.21 实际采集到的IF信号波形
实际情况下,目标不可能只有一个,而且还有各种噪声,芯片内部信号泄露(和工艺相关),综合各种因素最终得到这个IF信号。
“IF信号是两个信号重叠部分的差值,那我在电路上用运算搭一个差分电路就行了?”那~,当然不是。如图18.22所示。
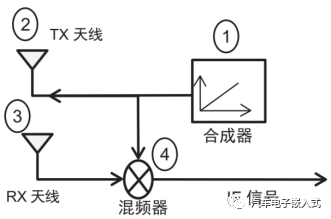
图18.22 MMWR信号处理框图
这两个信号,唉,这么说太不专业了。其实这个FMCW信号有一个专门的名称叫Chirp,很多时候人们把他翻译成啁啾。Chirp信号及其回波通过混频器,得到中频信号。
从IF中提取频率的方法,就不用多说了吧。大家都知道,额!还有人不知道,FFT(快速傅里叶变换)学习一下。
3、实战测距
“振南,你到底有没有真正实现过毫米波测距,别光讲原理,拿出东西来给大家看看!”似乎有点不太友好哈,别着急,有货!
振南专治各种不服,下面是振南基于瑞典的某MMWR品牌的芯片作的一些实验。模块实物如图18.23。
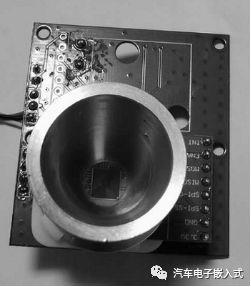

图18.23 瑞典某品牌的MMWR模块实物(带波导)
如图18.24-27。

图18.24 单目标测距实验(距离近)

图18.25 单目标测距实验(下距离远)
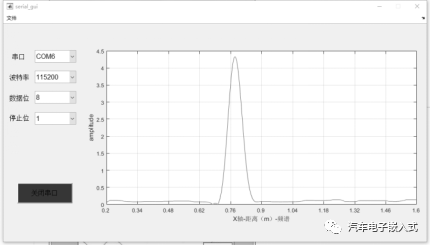
图18.26 单目标测距实验(距离近)对应FFT频谱
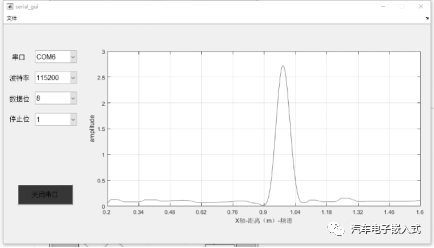
图18.27 单目标测距实验(距离远)对应FFT频谱
很明显,距离的远近造成了频率的变化。
有人会问:“那测距的最大距离有多远?10米、50米、100米?还有精度是多少?10mm?”嗯,这些与MMWR的一些关键参数相关。振南给大家仔细说一下。
3.1.2 测距的主要指标
1)最大测距范围
要详细地计算MMWR的测距范围其实是一件比较复杂的事情。跟很多因素有关,振南不想堆公式,那样会吓退很多人。所以,振南尝试采用宏观认知的方式,让大家理解测距范围与什么有关。
首先,发射功率是一个重要因素。很显然,发射功率越大,毫米波传播的距离越远。
但是我们可以试想一下,传播越远,那么回波的延时也就越大。但是Chirp是一定的宽度的,如果回波延时过大,可能导致其与Chirp信号没有重叠区(实际上不太可能没有重叠区,因为光速实在是太快了,而Chirp信号的宽度基本在微秒级,而MMWR一般的测距距离也就最多几千米,所以一定会有重叠区),或者是重叠区宽度比较短(它导致IF信号比较短,这个问题是可能出现的),从而使得IF信号的采集比较困难。如图18.28。
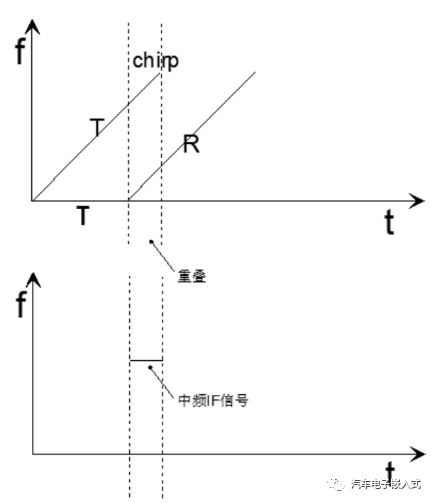
图18.28 回波延时过大导致IF信号过短
IF信号短了,但是我们还需要采集到足够的采样点去作FFT,那就要求ADC的采样率要足够高。另一方面,IF信号不光短了,它的频率还更高了。根据奈奎斯特采样定理ADC采样率要高于待检频率的2倍。你一定要明白,Chirp信号的频率可是高达几十GHz,甚至上百GHz(太赫兹)。IF信号的频率少说也有几MHz,ADC的采集率需要多高,就不言而喻了吧!
振南在实际调试过程中,测量距离30米左右,毫米波频率是122GHz,中频IF信号的频率大约在几百K到几MHz。使用STM32F303的片上差分ADC进行采集,采样率5MHz,最终效果是不错的。如图18.29-31。

图18.29 MMWR测距实验(左为实时FFT)
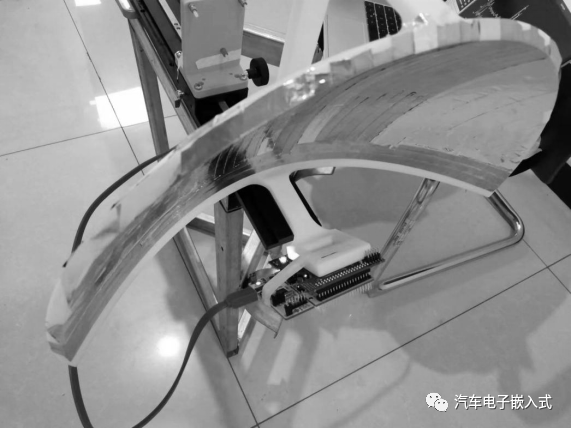
图18.30 MMWR测距实验(雷达加装抛物面天线)
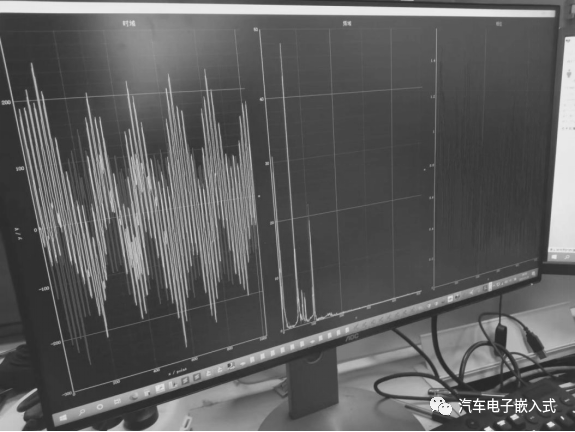
图18.31 MMWR测距实验(实时中频信号与FFT)
“这个抛物面天线挺高端啊,能不能详细讲讲?”别着急,不是不讲,时候未到。
那有没有办法扩大测距范围的同时,又不会对ADC提出太高的要求。毕竟我们还是要考虑成本的。大家可以想想…… OK,恭喜振南再次成为“冷场王”。(可能大家发现了,振南的写书风格是力求通俗、诙谐幽默、有种网文的感觉,同时又喜欢自问自答,创造一种“假互动”的效果,这可能与我多年从事教程创作和讲课有很大关系,只要你觉得易于接受、开心快乐就好)
“是不是可以把Chirp拉长一些,这样IF信号也许能长一些,同时频率也能低一些。”没错,我们可以减小Chirp的斜率,也就是频率随时间变化慢一些。如图18.32。
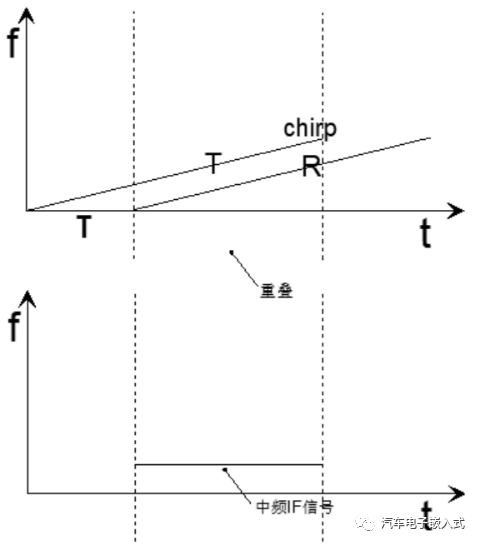
图18.32 将Chirp斜率减小IF信号长度增加同时频率降低
有一得必有一失!万事都是这个道理。这样作的代价是什么?对,降低了采样率,也就是测量一次距离需要更多的时间。
所以,决定MMWR测距范围的因素有1、发射功率 2、ADC的采样率 3、Chirp信号的斜率。但是这是一种感官意识上的理解。“大家是否同意我放出计算公式?”……又是一阵冷场。那我就当是默认了,公式,上!
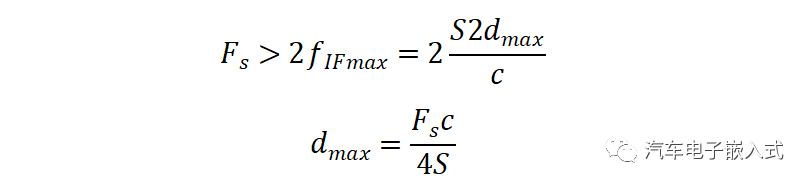
上式中Fs是ADC的采样率 c是光速 S是Chirp斜率。所以,最大测量距离与ADC采样率成正比,而与Chirp斜率成反比。(上式的解释:2dmax是毫米波一去一回的路程,它除以光速即为回波延时,回波延时乘以斜率便是中频IF信号的频率,而ADC采样率要大于2倍的信号频率)所以,公式计算结果与我们的宏观认知是一致的。
“那毫米波测距的精度怎么样?这个又与什么有关?”其实所谓的精度,就是分辨率。
2)距离分辨率
通俗来说,我们将两个物体放在一起,它们之间的距离多远的时候,MMWR可以分辨出它是两个物体。此时的这个距离就是分辨率。
我们仍然从宏观意识上来理解这个东西。MMWR测距本质上是频率到距离的一个对应关系。IF信号频谱上的一个尖峰就代表相应的位置上有一个物体。如图18.33。
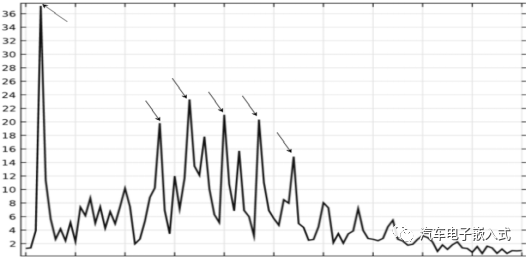
图18.33 IF信号频谱上的尖峰均代表相应位置有物体
顺便说一下,通过图18.33,大家应该也就明白了,MMWR可以同时探测多个物体的原因了(中频IF是可能包含多个频率成分的)。这就是MMWR的“多目标”特性。OK,我们知道FFT计算输出的频谱频点是离散的,比如我们经常作的1024点或2048点的FFT,最终输出的是0~511Hz或0~1023Hz各个整数频点的功率谱。
什么?FFT是什么?额…… 好吧,我被你打败了。先恶补一下FFT吧。
细节的读者可能已经意识到一个问题了:“如果我把物体正好放在两个频点之间的位置上,那频谱上这个物体会落在哪个频点上呢?”答案是都有可能。我们发现,当一个物体在某一个频点所对应的距离位置附近移动的时候,他在频谱上的频点并没有变化。换句话说,如果两个物体的距离小于两个相临频点所对应的距离之差,那么我们在频谱上是无法分辨出它们两个的。(实际情况是,它们在频谱上是同一个频点,只不过这个频点的功率值会高一些,因为它俩被看作同一个物体,表面积大了,回波强了)
请尽力理解上面的这段话。所以,MMWR测距的分辨率就是两个频点所对应的距离之差。这个距离之差,也就是可分辨的最小距离,有一个专门的名称,叫Rangebin。比如最大测量测量距离是10米,采用2048点的FFT,那么它的Rangebin就是10/1024≈9.765mm,这就是所谓的测距精度。
“但是ZGZL的MMWR测量精度能达到0.01mm?这到底是怎么作到的?”要揭秘这个问题,请继续往下看。
那距离分辨率与什么因素有关?“FFT的点数,更多点数的FFT可以把频谱划分得更细”没错。实际上我们会使用4096或8192,甚至更多点的FFT,当然这对ADC采样率与DSP都提出了很高的要求(要对不长的IF信号采集足够多的点,然后以足够快的速度计算FFT)。但是只提升FFT是不够的(FFT只是一个频率分析工具),IF信号里要有足够丰富、足够细粒度的频率成分。说白了,IF里都没有这个频率成分,你还搞啥呢?
所以,我们要让IF信号可以容纳更多的频率(频率容量,更准确的说叫“带宽”)。但是IF信号是由Chirp与回波信号通过减法而生成的,因此扩大IF信号带宽,根本上就是要扩大Chirp信号带宽。如图18.34。
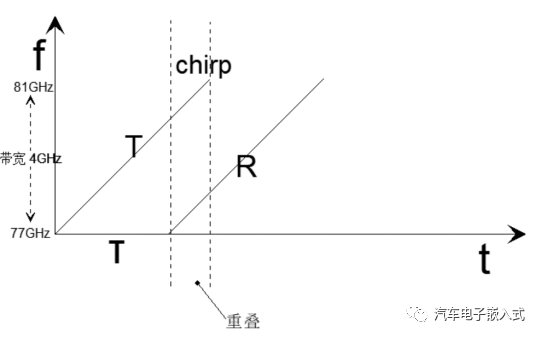
图18.34 Chip的带宽(以TI的77GHz毫米波为例)
我们平时说的24GHz、77GHz、122GHz毫米波,其实这些频率都是它的FMCW的开始频率。它们的带宽一般是开始频率的1-5%,比如24GHz的带宽是250MHz、77GHz是4GHz,而122GHz是7GHz。(122GHz是现在比较先进的,被称为太赫兹 THz,但是它还不是频率最高的,最高的可以达到300GHz,带宽为40GHz)
带宽越大,IF信号中的频率成分越丰富,我们使用更多点的FFT就可以提取出更细的频率,这样使得Rangebin不断缩小,最终距离分辨率提以大幅提高。距离分辨率提高的意义是巨大的,它是精确测量与雷达成像的重要基础。欧洲一些先进的毫米波厂商已经推出了300GHz的RFE芯片(雷达前端,它主要的是作用是产生Chirp,输出中频),来看看300GHz的RFE芯片什么样子,如图18.35。
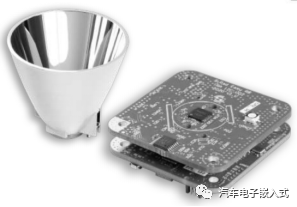
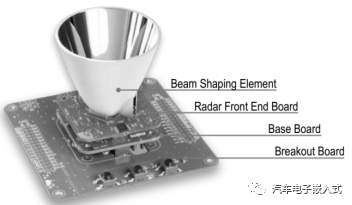
图18.35 欧洲某公司的300GHzMMWRDemo板
“那个小喇叭是干啥的?”振南一开始也叫他“小喇叭”,后来被专业人事笑话,说那叫“波导”。OK,那就是叫“波导”。因为太赫兹,尤其是频率高达300GHz的毫米波,很多特性已经接近光了。但是它却拥有光所不具备的穿透和全天候能力。
关于测距的指标,除了最大距离和分辨率之外,还有开放角、采样率。这些振南就不讲了。毫米波其实是一个博大精深的东西,真要展开讲的话,能专门出本书。这里仅介绍一些最基本的原理和常见的应用。
4、十步以外检测风吹草动
4.1 速度测量
前面振南向大家介绍了MMWR测距的原理。精彩不!OK,现在又有人提问了“物体不可能不动,那MMWR能测速吗?”来看一个东西,如图18.36。
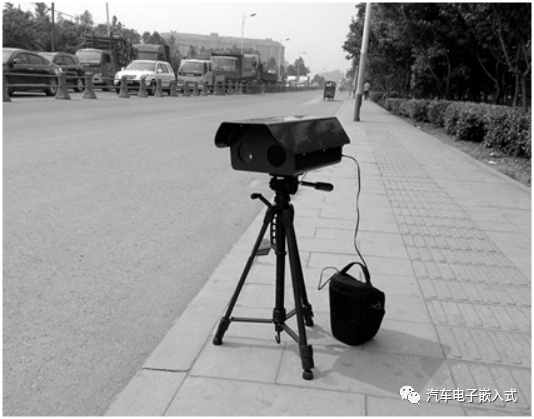
图18.36 毫米波测速仪
嗯,毫米波测速仪。那就是说毫米波是可以用来测速的。其实原理很简单,速度嘛,就是位移除以时间。我们对物体测量两次距离,然后用距离差除以采样时间,就是速度。示意图我就不画了。
在这样一个测速方法的设定下,就会出现一些问题:两次测距之间的间隔时间如何把握?太长可能会错过物体,比如物体以非常快速度移动;太短可能根本测不出来速度,即速度为0,因为同一个Rangebin下的位移将会被无视(上面讲过了,它们在频谱上是同一个频点)。最困难的情况是一个物体以极快的速度移动了很小的距离。这个时候,MMWR基本上就变成了“睁眼瞎”。
那该如何是好?我提示一下:FFT在分析频率成分的时候,在结果中会输出各频点的功率,还有各频点的相位!相位!相位!重要的事情说三遍。MMWR真正的高端应用基本上都是基于相位来实现的。相位可以为我们提供更多的有用信息。
我们以很小的间隔去进行两次测距,也就是说依次发送两个Chirp,如图18.37。
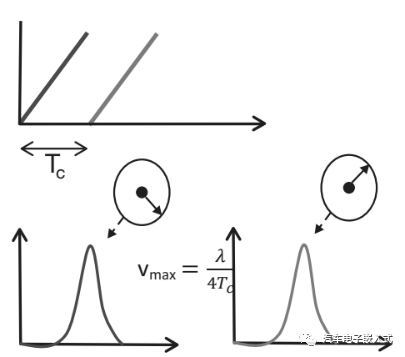
18.37 双线性调频脉冲速度测量
当然,这两次测距都会落在同一个Rangebin上(也就是同一个频点),但是它们的相位不同。我们通过相位的变化来计算这微小的位移。明白了吗?这还不明白?那0.01mm的位移测试精度是怎么实现的!
相位的玄机已道破,一切好像都不需要讲了。OK,本小节完结。
4.2 微位移检测
大距离用Rangebin,小位移用相位。什么是小位移?生活中有哪些小位移?其实非常多,应该说满目皆是。被风吹动的树叶,跺一脚地面的颤悠,还有前面提到过的呼吸时的前胸起伏,这些都是微位移。为什么说满目皆是呢,一切的振动都是微位移,而世界的本原就是振动和弦(参见加来道雄的《弦理论》)。
我直接上实际的实验,请看图18.38。
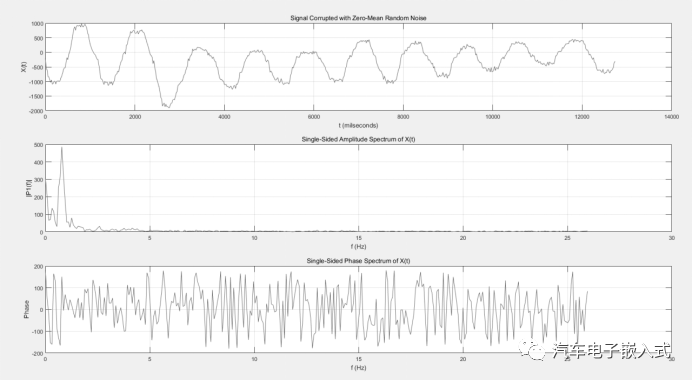
图18.38 振动检测并作基频提取
我们对一个进行简谐运动的物体进行连续的相位采集,然后通过相位计算得到一段段的微小位移,再将这些位移进行拼接处理,最终就可以还原出振动物体的轨迹。我们再对轨迹进行FFT,就可以计算得到它的基频。通过这种方法,我们也可以作到几十米之外,无接触的测量钢索的振动和拉力了。
振南说的很简单,但实际上会比较复杂。很多细节是需要考虑和处理的,比如相位混叠(就是微位移超出了一个相位的范围)、Rangebin跨域(振动正好生产在某一个Rangebin临界点上)等等。
MMWR的根本是 数学 和 算法 。
关于毫米波更高阶的知识和原理,振南就不再讲了。再往深里写,估计就要吓退更多人了。适可而止!关于毫米波更多的应用,大家可以自行百度。比如毫米波液位计、压力测量、温度测量、膜厚测量、材料检测等等。
编辑:黄飞
-
smartconfig到底是什么呢?怎样去使用它2022-02-22 2285
-
增量数据比较工作原理及原理图2021-06-11 991
-
数字式雷达信号处理器系统工作原理是什么?基本工作流程有哪些?2021-04-21 2082
-
光敏电阻工作原理图2009-12-01 25347
-
液压系统工作原理 (动画原理图)2009-10-26 23579
-
OP07工作原理图2009-09-29 10646
-
日光灯工作原理图2009-08-28 2951
-
ISO100工作原理图2009-06-26 1927
-
RS触发工作原理图2009-05-18 1947
-
探鱼器工作原理图2009-05-07 12882
-
BTL电路工作原理图2009-05-06 2715
-
极化天线的工作原理,原理图2009-05-05 10016
-
内燃机的工作原理图2008-04-12 16646
-
网卡工作原理图2008-04-01 12462
全部0条评论

快来发表一下你的评论吧 !
