

通过RA MCU和微型ROS简化机器人设计流程
电子说
描述
随着工业4.0和工业物联网的发展,机器人技术的需求变得越来越重要。同时,市场需要提供易于使用的架构,简化设计流程,并显著降低客户在各种应用中的设计风险。为了满足市场需求,瑞萨电子提供了基于MCU的micro-ROS解决方案。micro-ROS是一个使用ROS 2的机器人控制系统的开源项目,ROS 2是第二代ROS(机器人操作系统),用于微控制器上的各种机器人系统。
在本篇文章中,您将了解用于微型ROS实现工业机器手的最佳硬件和软件平台,这些平台可以使用RA6系列MCU上的解决方案简化设计过程。RA家族及其RA6系列MCU适用于需要以太网、CAN-FD、经得起未来考验的安全性、大尺寸嵌入式RAM以及运行闪存CoreMark®算法的低至107uA/MHz的低功耗物联网应用。更多详情,您可在后文“相关资料”中查看瑞萨RA系列网页网址。
在瑞萨电子与合作伙伴eProsima的共同努力下,我们开发了一个机械手演示系统,通过在RA6M5 MCU上的通信接口来控制机械臂,以展示基于MCU的机器人控制伺服电机的能力,如通过编程操作来抓取和改变物体位置的能力,以及通过游戏手柄与PC通信来进行手动操作的能力等。这个演示是使用商业OpenManipulator-X平台开发的。
通过RViz(ROS可视化GUI)可操作物体块,Rviz是机器人、传感器和算法的通用3D可视化环境,用于将物体块从A点移动到B点。

图1. 机器人手臂
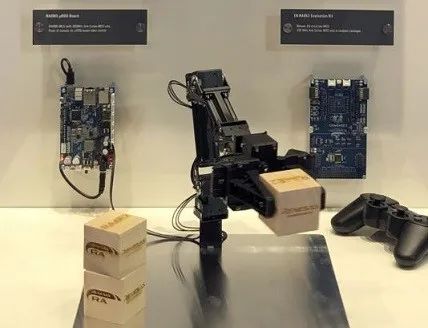
图2. 机器人手臂+基于ROS的机器人身体控制器(JP177)
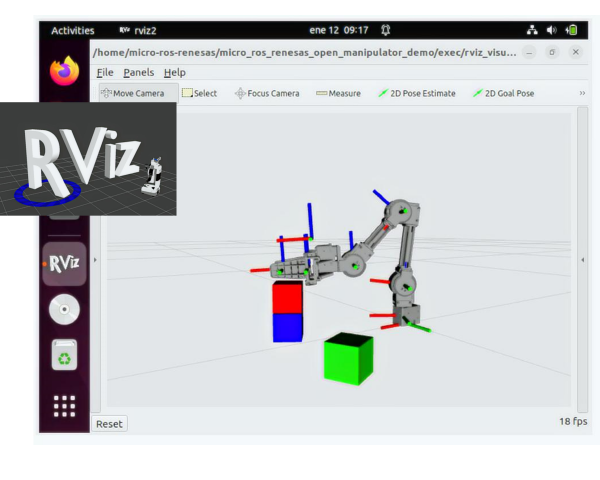
图3. 图形用户界面
RA6M5功能
通过即插即用的USB,使用micro-ROS与ROS 2通信;
机械手伺服的自动和引导控制;
从伺服器中检索机械手位置并在RViz上显示;
看门狗:检测通信问题,通过停止机械手运动措施来保证安全。
PC功能
运行micro-ROS代理与开发板通信;
使用常规ROS 2推送器来发送游戏手柄命令;
显示RViz上的机械手运动。
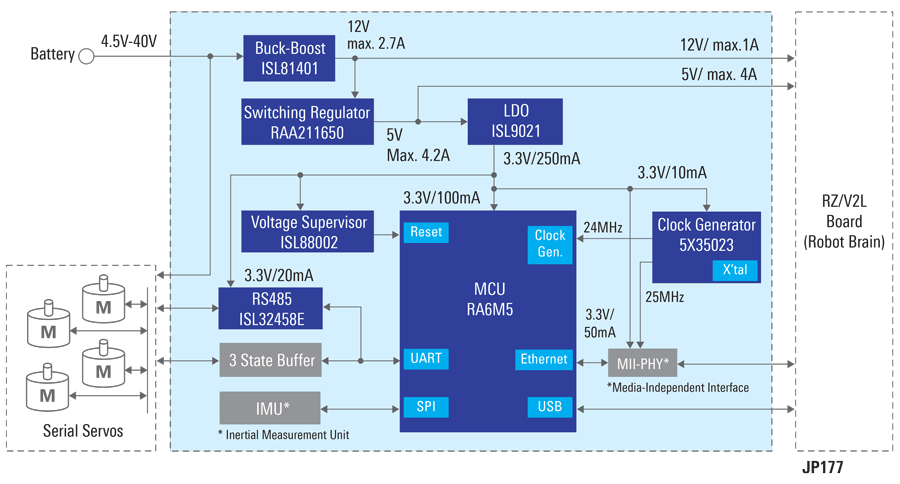
我们使用基于ROS的机器人身体控制器作为MCU平台,在OpenManipulator-X中实现。瑞萨电子在成功产品组合网页上介绍了使用RA6M5的基于ROS的机器人本体控制器的综合系统级框图。基于ROS的机器人本体控制器在微控制器上实现ROS 2节点,并在通用框架中实现传统机器人与物联网传感器和设备之间的互操作性。在基于ROS的机器人本体控制器上,系统设计人员可以通过单线UART和RS-485控制多个伺服系统,这有助于降低各种应用程序初始设计的开发成本和时间,如物流和仓库的服务机器人、安全、农业和医疗保健等。
基于ROS的机器人本体控制器系统框图
EK-RA6M5(评估套件)是用于RA6M5的MCU评估套件,可用于一般评估,并且是micro-ROS组织官方支持的评估套件。该套件包含快速启动MCU评估所需的所有必要的硬件功能和预编程代码。在micro-ROS GitHub页面上,您可以在瑞萨电子e2 studio和其他开发平台下载支持RA6M5和RA6T2的micro-ROS软件包。具体请在文末查看micro-ROS解决方案支持资源的链接。
eProsima评论:此解决方案演示了一个简化的示例,说明如何将类似的方法应用于更大、更复杂的工业场景,如仓库或生产线。eProsima是一家专门提供针对机器人、物联网和汽车行业的中间件解决方案的公司。eProsima和瑞萨电子的合作将促进基于嵌入式设备的新型机器人应用的扩展。micro-ROS弥合了微控制器和ROS 2之间的差距,高性能RA系列的官方支持使客户能够在工业4.0和工业物联网领域进行经济高效的开发。
来源:瑞萨电子
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识2025-04-27 2920
-
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践2025-03-03 6066
-
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!2023-11-30 7209
-
工程师说 | 通过RA MCU和微型ROS简化机器人设计流程2023-05-18 1866
-
基于ROS的机器人本体控制器2022-12-12 747
-
怎样将微型ROS移植到机器人的RA MCU中呢2022-02-11 2464
-
如何对ROS机器人的定位导航进行仿真2021-12-23 1801
-
ROS机器人定位导航仿真2021-12-17 1373
-
瑞萨电子与 eProsima 合作,将微型 ROS 移植到机器人的 RA MCU 中2021-12-08 969
-
瑞萨将micro-ROS移植到RA MCU中2021-09-24 3227
-
瑞萨电子RA MCU集成micro-ROS框架,简化专业机器人开发2021-09-02 2700
-
基于Wild Thumper的ROS机器人设计2020-12-25 2631
-
基于FreeRTOS的micro(微型)ROS2020-09-25 3393
-
[分享]LabVIEW 与机器人设计2009-05-30 9241
全部0条评论

快来发表一下你的评论吧 !
