

STM32的PWM波形输出配置的大神总结
电子说
描述
本文分享STM32之PWM波形输出配置总结。
一. TIMER分类:
STM32中一共有11个定时器,其中TIM6、TIM7是基本定时器;TIM2、TIM3、TIM4、TIM5是通用定时器;TIM1和TIM8是高级定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。其中系统嘀嗒定时器是前文中所描述的SysTick。
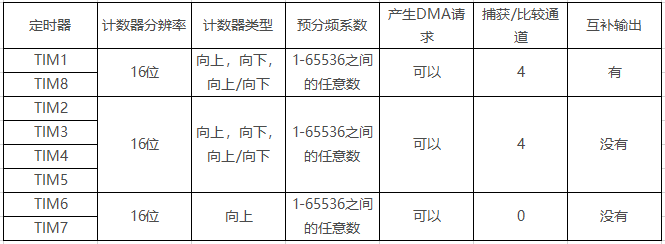
其中TIM1和TIM8是能够产生3对PWM互补输出,常用于三相电机的驱动,时钟由APB2的输出产生。TIM2-TIM5是普通定时器,TIM6和TIM7是基本定时器,其时钟由APB1输出产生。
二、PWM波形产生的原理:
通用定时器可以利用GPIO引脚进行脉冲输出,在配置为比较输出、PWM输出功能时,捕获/比较寄存器TIMx_CCR被用作比较功能,下面把它简称为比较寄存器。
这里直接举例说明定时器的PWM输出工作过程:若配置脉冲计数器TIMx_CNT为向上计数,而重载寄存器TIMx_ARR被配置为N,即TIMx_CNT的当前计数值数值X在TIMxCLK时钟源的驱动下不断累加,当TIMx_CNT的数值X大于N时,会重置TIMx_CNT数值为0重新计数。
而在TIMxCNT计数的同时,TIMxCNT的计数值X会与比较寄存器TIMx_CCR预先存储了的数值A进行比较,当脉冲计数器TIMx_CNT的数值X小于比较寄存器TIMx_CCR的值A时,输出高电平(或低电平),相反地,当脉冲计数器的数值X大于或等于比较寄存器的值A时,输出低电平(或高电平)。
如此循环,得到的输出脉冲周期就为重载寄存器TIMx_ARR存储的数值(N+1)乘以触发脉冲的时钟周期,其脉冲宽度则为比较寄存器TIMx_CCR的值A乘以触发脉冲的时钟周期,即输出PWM的占空比为 A/(N+1) 。
三、STM32产生PWM的配置方法:
1、配置GPIO口:
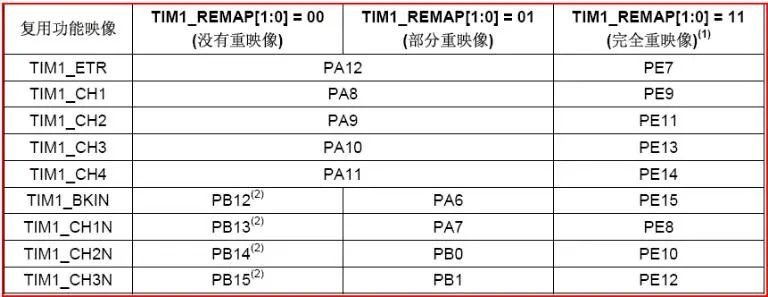
配置IO口的时候无非就是开启时钟,然后选择引脚、模式、速率,最后就是用结构体初始化。不过在32上,不是每一个IO引脚都可以直接使用于PWM输出,因为在硬件上已经规定了用某些引脚来连接PWM的输出口。下面是定时器的引脚重映像,其实就是引脚的复用功能选择:
a.定时器1的引脚复用功能映像:
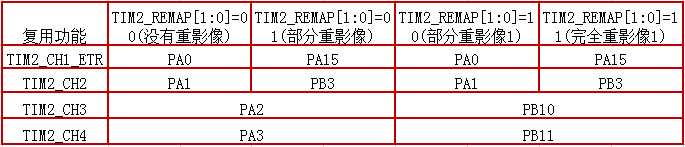
b.定时器2的引脚复用功能映像:
c.定时器3的引脚复用功能映像:

d.定时器4的引脚复用功能映像:
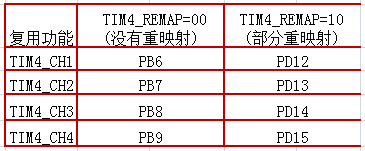
根据以上重映像表,我们使用定时器3的通道2作为PWM的输出引脚,所以需要对PB5引脚进行配置,对IO口操作代码:
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);//使能GPIO外设和AFIO复用功能模块时钟 GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //选择Timer3部分重映像 //选择定时器3的通道2作为PWM的输出引脚TIM3_CH2->PB5 GPIOB.5 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, GPIO_InitStructure);//初始化引脚
2、初始化定时器:
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//定义初始化结构体 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟 //初始化TIM3 TIM_TimeBaseStructure.TIM_Period = arr; //自动重装载寄存器的值 TIM_TimeBaseStructure.TIM_Prescaler =psc; //TIMX预分频的值 TIM_TimeBaseStructure.TIM_ClockDivision = 0; //时钟分割 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数 TIM_TimeBaseInit(TIM3, TIM_TimeBaseStructure); //根据以上功能对定时器进行初始化
3、设置TIM3_CH2的PWM模式,使能TIM3的CH2输出:
TIM_OCInitTypeDef TIM_OCInitStructure;//定义结构体 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;//选择定时器模式,TIM脉冲宽度调制模式2 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比较输出使能 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;//输出比较极性低 TIM_OC2Init(TIM3, TIM_OCInitStructure);//根据结构体信息进行初始化 TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能定时器TIM2在CCR2上的预装载值
4、使能定时器3:
TIM_Cmd(TIM3, ENABLE); //使能定时器TIM3
经过以上的操作,定时器3的第二通道已经可以正常工作并输出PWM波了,只是其占空比和频率都是固定的,我们可以通过改变TIM3_CCR2,则可以控制它的占空比。修改占空比的函数为:TIM_SetCompare2(TIM3,n); n不同,占空比不同。
5、修改pwm波形的占空比:
编写一个函数:void TIM3_PWM_Init(u16 arr,u16 psc);将以上所有的代码都加进来这个函数中,只要在main函数中调用该函数进行初始化,然后使用TIM_SetCompare2()函数修改PWM的占空比就可以在PB5脚得到需要的PWM波形了。关于频率以及占空比的计算方法有以下例子:
int main(void)
{
TIM3_PWM_Init(9999,143);//频率为:72*10^6/(9999+1)/(143+1)=50Hz
TIM_SetCompare2(TIM3,4999);//得到占空比为50%的pwm波形
while(1);
}
来源:硬件攻城狮
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
STM32F407 基本定时器配置输出PWM方波2023-07-06 9598
-
SMT32的PWM波形输出配置总结2023-02-22 2794
-
SMT32的PWM波形输出配置的大神总结2022-02-08 534
-
如何使用STM32输出PWM波形2022-01-25 2259
-
用STM32F103输出一路PWM波形,有完整源码。用示波器观察输出波形2022-01-14 1441
-
用STM32F103输出一路PWM波形和DAC功能完成波形输出2021-12-22 1164
-
STM32 TIM 多通道互补PWM波形输出配置快速入门2021-12-07 1718
-
STM32输出PWM波形2021-11-30 1086
-
STM32单片机-PWM波形输出2021-11-23 1197
-
STM32L475使用PWM输出波形2020-10-09 4550
-
STM32_ TIM输出PWM波形2020-04-08 11017
-
STM32F4_TIM输出PWM波形2020-04-07 6865
-
STM32F4_TIM输出PWM波形 (可调频率、占空比)2020-03-24 16249
-
STM32如何实现可调频率、 占空比的PWM波形,且可指定输出脉冲个数?2020-03-12 29717
全部0条评论

快来发表一下你的评论吧 !
