

CW32定时器操作讲解——输入捕获
电子说
描述
CW32系列MCU的GTIM、ATIM的每个定时器都带有至少4路独立的捕获 / 比较通道,输入捕获功能可以测量输入信号的脉冲宽度或者频率。当捕获比较通道 CHy 上信号发生跳变(上升沿或下降沿)时,硬件自动将当前计数寄存器 GTIMx_CNT 的值存放到对应通道的比较捕获寄存器 GTIMx_CCRy 中,完成一次捕获。通过连续几次捕获即可完成信号脉冲宽度或者频率的测量。
功能框图如下图所示:
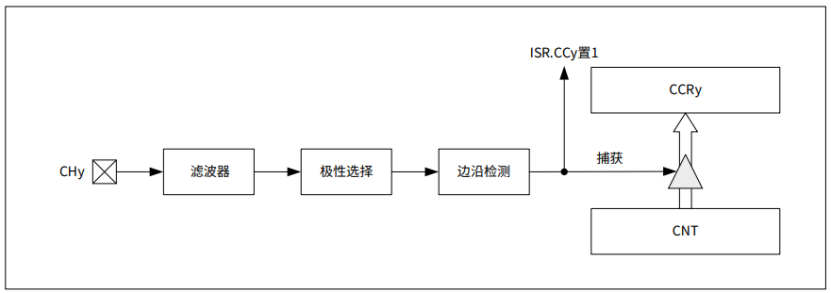
各个通道上触发捕获的条件由比较捕获控制寄存器 GTIMx_CMMR 决定。

当发生一次捕获时,通道 CHy 比较捕获中断标志 GTIMx_ISR.CCy 被硬件置位,如果允许中断 ( 设置中断使能寄 存器 GTIMx_IER.CCy 为 1),CPU 将响应中断服务程序。退出中断服务程序之前,应设置中断标志清除寄存器 GTIMx_ICR.CCy 为 0 以清除该标志。
输入捕获来源
GTIM 的输入捕获来源可以是外部 GTIMx_CHy 引脚,也可以是片内其它外设,通过通用定时器输入捕获来源配置寄存器 SYSCTRL_GTIMxCAP 进行配置。当 SYSCTRL_GTIMxCAP.CHy 为 0x00 时,输入捕获信号的外部输入端口由 GPIO 复用功能寄存器 (GPIOx_AFRH 和 GPIOx_AFRL) 进行配置。当 SYSCTRL_GTIMxCAP.CHy 为 0x01 ~ 0x07 时,输入捕获信号来自片内其它外设,如下表所示:
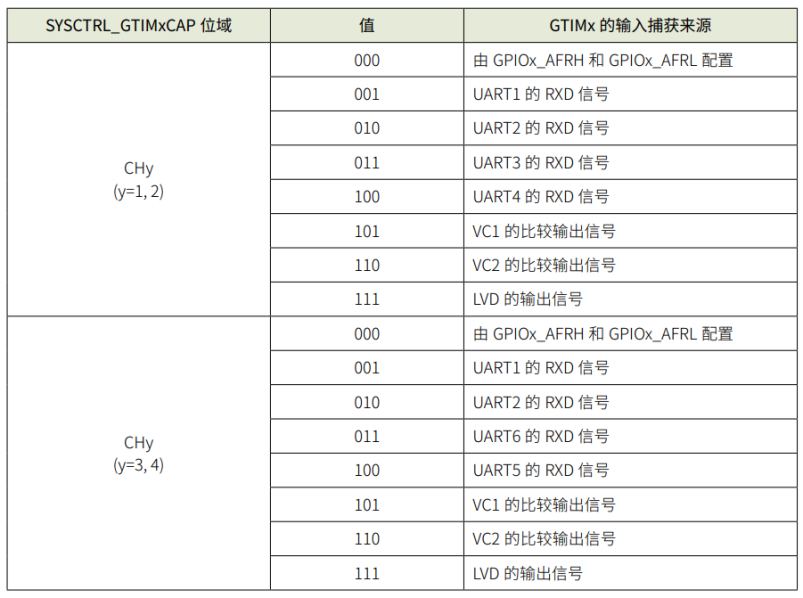
这种配置下,可以在芯片内部实现外部输入的互联,例如将 UART 的 RXD 信号作为输入捕获来源,可以实现对 UART 波特率的自动检测。
实例演示:利用GTIM的输入捕获功能,测量PWM信号的周期和脉宽
1.初始化系统时钟
void RCC_Configuration(void)
{
__RCC_GTIM1_CLK_ENABLE();
__RCC_GPIOA_CLK_ENABLE();
RCC_HSI_Enable(RCC_HSIOSC_DIV6);
// 系统时钟设置为HSI,6分频,8MHz, PCLK、HCLK不分频, PCLK=HCLK=SysClk=8MHz
}
2.初始化GPIO
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.IT = GPIO_IT_NONE;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pins = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_Init(CW_GPIOA, GPIO_InitStruct);
PA06_AFx_GTIM1CH1();//设置PA06复用为GTIM1_CH1, 上升沿触发捕获
PA07_AFx_GTIM1CH2();//设置PA07复用为GTIM1_CH2,下降沿触发捕获。
}
3.配置中断服务程序
void NVIC_Configuration(void)
{
__disable_irq();
NVIC_EnableIRQ(GTIM1_IRQn);
__enable_irq();
}
4.GTIM1中断服务程序:通道1的输入捕获中断获取计数值VALUE1,通道2的输入捕获中断获取计数值VALUE2,通道1的第2次输入捕获中断获取计数值VALUE3。则信号脉宽=VALUE2-VALUE1,信号周期=VALUE3-VALUE1。注意如果待测量信号的脉宽和周期较长,在计算时需要考虑定时器的溢出问题,详见定时器溢出中断处理内容。
void GTIM1_IRQHandler(void)
{
GTIM1_IRQHandlerCallBack();
}
void GTIM1_IRQHandlerCallBack(void)
{
static uint8_t stage = 0;
static uint32_t cnt = 0;
if (GTIM_GetITStatus(CW_GTIM1, GTIM_IT_OV))
{
GTIM_ClearITPendingBit(CW_GTIM1, GTIM_IT_OV);
if (stage == 1)
{
cnt++;
}
}
if (GTIM_GetITStatus(CW_GTIM1, GTIM_IT_CC1))
{
if (stage == 0)
{
PWMPeriod = GTIM_GetCapture1(CW_GTIM1);
stage = 1;
}
else if (stage == 1)
{
PWMPeriod = GTIM_GetCapture1(CW_GTIM1) + cnt * 65536 - PWMPeriod;
stage = 0;
cnt = 0;
}
GTIM_ClearITPendingBit(CW_GTIM1, GTIM_IT_CC1);
}
if (GTIM_GetITStatus(CW_GTIM1, GTIM_IT_CC2))
{
if (stage == 1)
{
PWMWidth = GTIM_GetCapture2(CW_GTIM1) + cnt * 65536 - PWMPeriod;
}
GTIM_ClearITPendingBit(CW_GTIM1, GTIM_IT_CC2);
}
}
5.主程序:使用GTIM1的CH1和CH2两个通道对PWM输入信号进行测量,在捕获中断服务程序中完成信号的周期和脉宽计算。
static uint32_t PWMPeriod = 0;
static uint32_t PWMWidth = 0;
int32_t main(void)
{
RCC_Configuration();//System Clocks Configuration
GPIO_Configuration();//GPIO Configuration
NVIC_Configuration();//NVIC Configuration
GTIM_InitTypeDef GTIM_InitStruct = {0};
GTIM_ICInitTypeDef GTIM_ICInitStruct = {0};
GTIM_InitStruct.Mode = GTIM_MODE_TIME; /*!< GTIM的模式选择。*/
GTIM_InitStruct.OneShotMode = GTIM_COUNT_CONTINUE;
/*!< GTIM的单次/连续计数模式选择。*/
GTIM_InitStruct.Prescaler = GTIM_PRESCALER_DIV1; /*!< GTIM的预分频系数。*/
GTIM_InitStruct.ReloadValue = 0xFFFF; /*!< GTIM的重载值。*/
GTIM_InitStruct.ToggleOutState = DISABLE;
GTIM_TimeBaseInit(CW_GTIM1, GTIM_InitStruct); //GTIM的基础参数初始化
GTIM_ICInitStruct.CHx = GTIM_CHANNEL1;// GTIM 输入捕获的配置参数
GTIM_ICInitStruct.ICFilter = GTIM_CHx_FILTER_NONE;
GTIM_ICInitStruct.ICInvert = GTIM_CHx_INVERT_ON;
GTIM_ICInitStruct.ICPolarity = GTIM_ICPolarity_Rising;
GTIM_ICInit(CW_GTIM1, GTIM_ICInitStruct);//输入捕获功能初始化
GTIM_ICInitStruct.CHx = GTIM_CHANNEL2;
GTIM_ICInitStruct.ICPolarity = GTIM_ICPolarity_Falling;
GTIM_ICInit(CW_GTIM1, GTIM_ICInitStruct);
GTIM_ITConfig(CW_GTIM1, GTIM_IT_CC1 | GTIM_IT_CC2 | GTIM_IT_OV, ENABLE);
GTIM_Cmd(CW_GTIM1, ENABLE);
while (1)
{
}
}
6.演示说明:
将同一个PWM输入信号引入到PA06和PA07上,运行程序,使用GTIM1的CH1和CH2两个通道对PWM输入信号的脉宽和周期进行测量。
来源:武汉芯源半导体
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
CW32定时器及其中断介绍2026-01-14 205
-
请问CW32系列微控制器提供了哪些时钟源和定时器?2025-12-16 237
-
CW32定时器及中断介绍2025-12-01 277
-
单片机定时器的用法2024-01-04 3463
-
【有那么点详细的CW32学习笔记】通用定时器——输出比较2023-12-28 2606
-
STM32定时器(三)输入捕获2023-07-21 7095
-
详解STM32定时器捕获功能2023-01-12 10991
-
通用定时器的输入捕获实验2022-01-12 1132
-
STM32定时器输入捕获实验2021-12-14 1255
-
通用定时器的PWM输入捕获实验2021-11-24 1358
-
华大HC32-(05)-定时器输入捕获2021-11-23 1374
-
stm32 定时器 捕获2018-09-08 2871
-
基于STM32定时器输入捕获解析2018-09-04 6916
-
stm32定时器输入捕获2017-10-13 24911
全部0条评论

快来发表一下你的评论吧 !
