

未来的车载电气系统:区域架构与软件定义车辆
汽车电子
描述
从域架构到区域架构——软件定义车辆(SWdV)和对未来数据线的要求
目前有两个术语在阅读汽车专业文章时是绕不开的。其一是大家总是不断读到的所谓“区域架构” ,在与之相关的文章中也经常阅读到“软件定义车辆(SWdV)”。
那么这些术语是怎么回事呢?它们将如何影响未来几代汽车?这些正是我们在这篇博客文章中要探讨的问题。
1
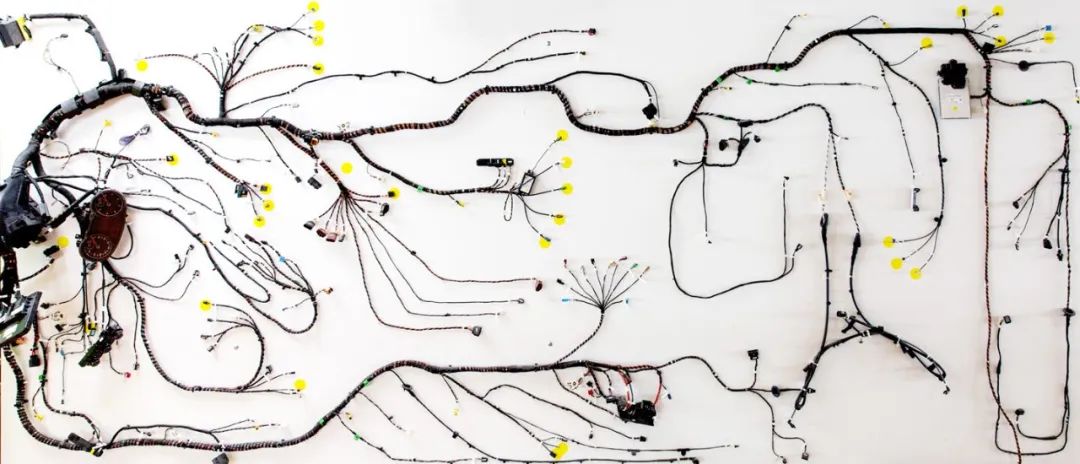
回顾过去:布线复杂、重量大
那么“区域架构”和“软件定义车辆(SWdV)” 这些术语是怎么回事呢?它们将如何影响未来几代汽车?为了能够回答这些问题,我们简短地回顾一下过去。车载电气系统拓扑的第一种形式被称为“分布式”或“模块化架构”。在这种形式中,所有传感器和执行器都被单独直接连接到一个控制单元。每个传感器或执行器都具有功能所需的智能,只将控制信号和已经制备的测量信号通过电缆和总线系统(通常是Lin或Can总线)传输到控制单元。每辆车上都安装了几百个传感器和多达一百个控制单元。个别电缆的长度可达16.5米。这使得车内电缆总长度迅速超过公里极限的情况屡见不鲜。其结果是布线非常复杂,线束重量也很大。
模块化架构
每个控制单元都必须使用专门针对其功能的软件(固件)进行编程。固件更新通常只能用特殊的编程电缆直接在设备上进行。这样就必须去专业的修理厂,而且只有在极少数情况下才进行更新。
出厂后通过附加功能扩展车辆功能是非常困难的,甚至无法实现。每个功能至少需要在车辆上安装一条连接到控制单元的额外电缆。通常需要更新控制单元上的固件来给新功能提供支持。这种情况下的花费很快就超过了所获得的收益。
随着车辆功能数量的增加,特别是在安全和舒适领域,这种布线形式很快就达到了极限。
这就是“域架构”的诞生时刻。
2
当前技术状况:域架构:
与“模块化架构“不同,域架构遵循的方法是根据传感器和执行器的功能和任务来划分它们(领域)。在车辆中定义了各种功能域,例如驱动器、舒适或信息娱乐。它们中的每一个都由一个更高级的控制单元,域控制器(DCU:Domain Control Unit,控制单元)进行监视和控制。与传感器/执行器的连接可以通过低成本总线连接(例如Lin或Can总线)来实现。控制单元本身被连接到一个性能强劲且面向服务的网络,即所谓的网关(例如以太网)。因此随时都可以用新功能例如ADAS(Advanced Driver Assist System,高级驾驶辅助系统)毫无问题地改造附加的域或控制单元。
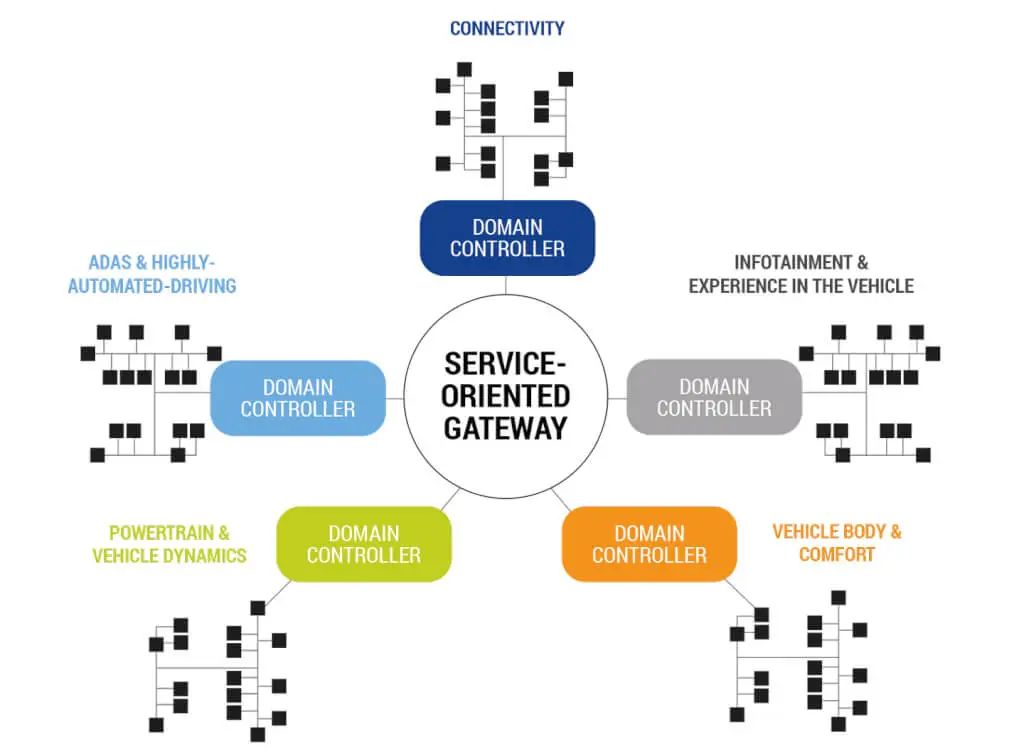
域架构
但是如果一个域的功能不能在物理上安装在车辆的同一位置,那么这种技术的缺点就很快就显现出来。这反过来又导致从控制单元到传感器或执行器的电缆过长。此时可以引用“转向灯”功能这个简单示例:在车辆的不同角落至少应当给6个转向灯布线,但所有转向灯都由一个控制单元触发。这种类型的车辆拓扑结构体现了当前的技术状况!
然而汽车世界目前正处于一个极端的转变之中。除了用替代驱动器取代内燃机外,“自动驾驶”的大趋势正在充斥在整个行业中,这就需要给未来的车载电气系统提供新的设计。
3
未来的车载电气系统:区域架构与软件定义车辆:
域架构当然也有一些优点。但是为了应对现代车辆的复杂性并满足未来的要求,需要一种不同的方法,那就是区域架构。
区域方法(区域架构)与面向域的解决方案不同,其功能根据它们在车辆中的位置而不是根据它们的任务来安排。在一辆简单的车辆中可能只有四个区域,每个角落一个。物理区域中的所有设备都由区域控制器,也称为区域网关或控制单元(电子控制单元)来控制。这些区域控制器又通过主干链路(高速数据链路)连接到中央计算单元。
物理区域中由区域控制单元监控的所有任务都被分配给该区域。这样照明、图像传感器、转向灯、制动器、转向、悬架等就可以组合成一个共同的区域。
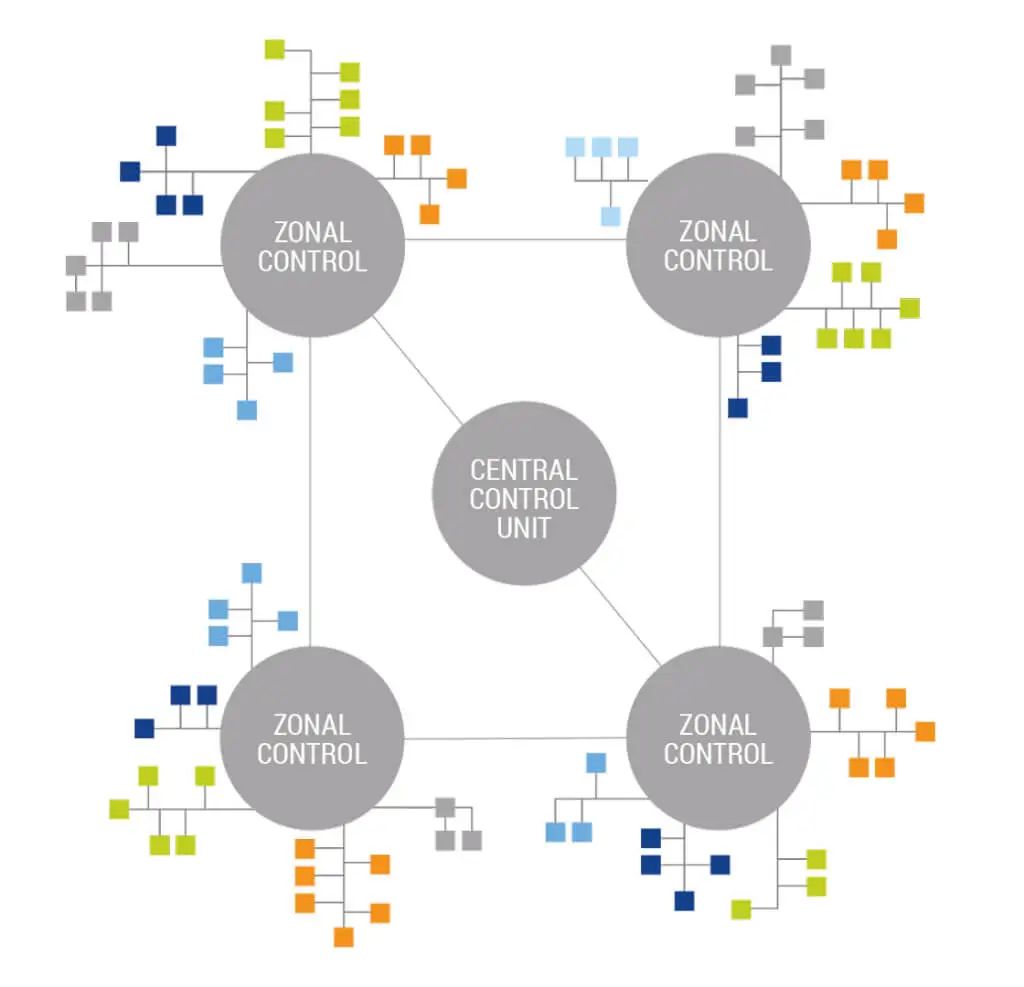
区域架构
除了简化布线以外,模块化和灵活性对于充分发挥该解决方案的优势起着非常重要的作用。
这里的模块化意味着可以用相同的硬件(例如相同的控制单元)实现不同的任务。
灵活性是更新、错误修复、配置和扩展的能力,而不会让驾驶员花费太多。有了所谓的“Over the Air”(OTA,空中下载技术)功能,就可以通过连接到互联网来执行这些操作,而不必去修理厂。车辆检查是否有更新,并完全独立地在其控制单元上加载或更新安装这些软件。选配和扩展可以由车主购买和安装,原则上类似于知名移动设备操作系统提供商的应用商店。
为了在实践中实现这种模块化和灵活性,将来需要在软件中而不是通过硬件中生成这种功能。现代智能手机的模式就是这方面的一个很好示例,在智能手机中能够通过应用程序给用户提供了各种各样的任务和应用。除了打电话,还可以通过智能手机拍照或导航。如果愿意,甚至可以完成银行业务或者在社交媒体上获取信息。
这种方法在汽车中被称为“软件定义车辆”。车辆中的几乎所有功能不再通过基于硬件的控制器来实现,而是由程序(App)在通用控制计算机(区域控制器)上解决这些任务。优点是许多应用程序同时运行(多任务处理),因此一个区域的所有功能都可以在一个区域控制器上实现。当然,这需要非常高的计算能力,但也需要大量安装在区域控制器中,与传感器/执行器连接的接口。这些区域控制器的任务还包括与中央计算单元通信。发送到该中心的那些数据因此由区域控制器预先过滤并确定优先级。系统复杂性因而显著降低,中央计算单元可以专注于重要数据的处理(例如:ADAS功能,评估图像数据等)。
区域控制器和中央计算单元之间的数据连接需要可靠且快速的通信。汽车以太网解决方案(例如MultiGiG)是实现这一目标的手段。
这种连接被称为主干。
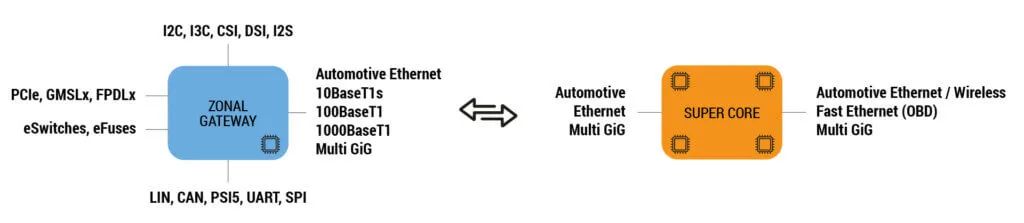
区域网关到中央计算机的通信
“软件定义车辆”的方法不可避免地导致主机厂的重大范式转移。虽然到目前为止,车辆制造商是车辆中所安装技术设备(硬件)的专有技术承载者,但现在这些功能和价值创造几乎完全从硬件转移到软件。重点不再是车辆本身,而更多的是功能,并根据客户的要求对功能进行个性化调整。然而到目前为止,软件开发还不是主机厂的核心能力。因此我们已经可以在这方面看到不同的趋势。一些公司(通常是较年轻的公司)倾向于向软件服务提供商或完整的系统(例如来自谷歌的安卓)迈进,而“传统”主机厂则更倾向于试图将专有技术保留在公司内部,并投资建立自己的软件部门。无论这些路线中的哪一个会长期占上风,都让人兴奋不已。
同样有趣的是,全新的商业模式正在出现。
功能本身不再与车辆相关联。二手车的经销商,甚至是客户可以相对容易地改装新功能,从而为车辆创造附加值。因此汽车的价值在整个产品生命周期中保持不变,甚至可能增加。
现在还可以提供功能的临时使用或订阅解决方案。
另一个优点是车辆可以与其周围环境通信。可以在车辆运行过程中收集数据,并将这些数据存储在例如云中。通过这种数据交换可以不断改进功能和服务,然后可以在车辆中实时更新这些功能和服务。多辆车之间的直接通信在技术方面也是可以想象的。所有这些可能性都是自动驾驶道路上的又一个重要里程碑。
4
前景:对计算能力和数据线的巨大需求
要将车载电气系统架构转换为区域架构,当然还需要一段时间。所需的25 Gbit/s或更高的计算能力和数据线等挑战仍然有待解决。但是估计大体上到2030年就有可能实现。世界各地的技术人员都在努力寻求解决方案。
MD ELEKTRONIK凭借其产品组合,成为聚焦于这些要求的,非常强大且称职的合作伙伴。我们为同轴电缆、UTP和STP (*),以及USB产品,以及光学数据传输提供恰当的解决方案。得益于高度自动化的生产策略,我们的产品符合最高的质量标准。
5
总结:
汽车世界正在发生巨大的变化。给汽车制造商带来巨大的挑战的不仅是向电力驱动的转换。为“四轮智能手机”的想法提供解决方案也同样重要。
这方面的一个重要的方法是用低成本网线(例如MultiGiG以太网)取代大量的单条“点对点”电缆,从而提高车载电气系统的效率。这样一方面带来了显著减轻重量的好处。这对控制单元制造商来说也是一个巨大的挑战,因为许多以前在单个传感器或执行器中实现的功能,现在作为软件解决方案集成到这些控制单元中。这两种方法分别被描述为“区域架构”和“软件定义车辆”。
6
结论:
在计算能力和数据传输方面的要求非常高,目前还有很大的提升空间。未来的数据线必须被设计成可以进行不超过25 Gbit/s或更快速率的可靠数据传输。光学数据线在这方面正日益成为铜基电缆的卓越替代品。
(*)UTP – Unshielded Twisted Pair,非屏蔽双绞线STP – Shielded Twisted Pair,屏蔽双绞线
编辑;hf
-
什么是电气系统微机保护设置?2013-03-22 2354
-
电气系统接入DCS实现发电厂电气监控系统的可行性2020-12-04 3098
-
如何对充电站电气系统进行测试?2021-05-10 2077
-
双元结构的电气系统有什么优势?2021-05-17 1742
-
电子电气架构、车载操作系统、基础软件平台等之间有什么关系?2021-09-26 2996
-
如何通过车辆计算网关平台推动软件定义的汽车2022-11-08 885
-
分区电子电气架构如何支持软件定义汽车2023-02-23 1066
-
基于CHS电气系统设计流程研究2010-06-10 818
-
电气系统重要负荷供电方案架构简介2023-01-31 1411
-
电气系统包括什么2023-04-17 19965
-
直播回顾 | 新一代电子电气系统研发平台的应用探讨2022-05-31 1034
-
新能源汽车电气系统的组成2023-08-18 8733
-
罗森伯格H-MTD连接器助力汽车制造商设计并实现区域架构2024-07-31 2070
-
软件定义车辆加速推进汽车电子技术的未来发展2024-11-17 1498
-
解锁未来汽车电子技术:软件定义车辆与区域架构深度解析2025-04-27 1800
全部0条评论

快来发表一下你的评论吧 !
