

如何使用KD2204M/SMB2204M驱动器驱动步进电机?
工业控制
1285人已加入
描述
实验效果
凌顺实验室(lingshunlab.com)演示实现如何使用KD2204M/SMB2204M驱动器驱动步进电机。
元件说明
特点:
高性能,价格低,平稳性佳,低噪音,平稳性极好
设有8档等角度恒力矩细分 ,最高 64/128 细分
采用独特的控制电路,有效降低了噪音,增加了转动平稳性
电流控制平滑,精准,电机发热小
最高反映频率可达 200Kpps
步进脉冲停止超过 400ms时,线圈电流自动减半,减少电机过热
双极恒流斩波方式,使得相同的电机可以输出更大的速度和功率
光电隔离信号输入/输出,抗干扰能力强
驱动电流从 0.0A/相 到 1.5A/相 连续可调
电压输入范国:DC6-30V 具有过压、欠压等出错保护功能
引脚说明
+ :输入信号公共端
PU :步进脉冲信号
DR :方向控制信号
MF :电机释放信号
+V :电源正 6V-30V
-V :电源负
+A :步进电机A相+
-A :步进电机A相-
+B :步进电机B相+
-B :步进电机B相-
BOM表
| 名称 | 数量 |
|---|---|
| Arduino Uno | x1 |
| KD2204M/SMB2204M 电机驱动 | x1 |
| 6V-30V电源 | x1 |
| 跳线(杜邦线) | 若干 |
接线图
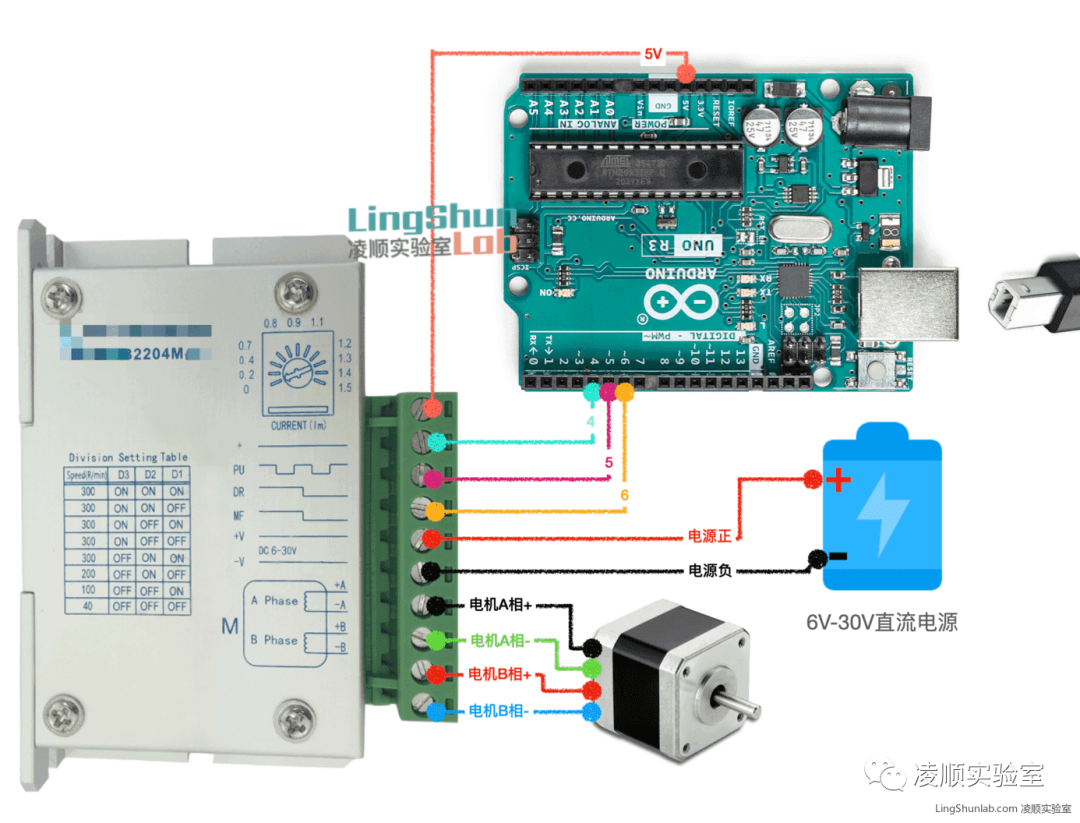
| 2204M 驱动器 | Arduino Uno | 步进电机 | 6V-30V电源 | |||
| + | <---> | 5V | ||||
| PU | <---> | 4 | ||||
| DR | <---> | 5 | ||||
| MF | <---> | 6 | ||||
| V+ | <-----------------> | + | ||||
| V- | <-----------------> | - | ||||
| A+ | <-----> | A+ | ||||
| A- | <-----> | A- | ||||
| B+ | <-----> | B+ | ||||
| B- | <-----> | B- | ||||
程序代码
int step_pin = 4; // Enable
int dir_pin = 5; // Step
int enable_pin = 6; // Dir
int x;
void setup()
{
pinMode(enable_pin,OUTPUT);
pinMode(step_pin,OUTPUT);
pinMode(dir_pin,OUTPUT);
digitalWrite(enable_pin,HIGH); // Set Enable low
}
void loop()
{
digitalWrite(dir_pin,HIGH); // Set Dir high
for(x = 0; x < 200; x++) // Loop 200 times
{
digitalWrite(step_pin,HIGH); // Output high
delayMicroseconds(800); // Wait 1/2 a ms
digitalWrite(step_pin,LOW); // Output low
delayMicroseconds(800); // Wait 1/2 a ms
}
delay(2000); // pause one second
digitalWrite(dir_pin,LOW); // Set Dir low
for(x = 0; x < 200; x++) // Loop 200 times
{
digitalWrite(step_pin,HIGH); // Output high
delayMicroseconds(800); // Wait 1/2 a ms
digitalWrite(step_pin,LOW); // Output low
delayMicroseconds(800); // Wait 1/2 a ms
}
delay(2000); // pause one second
}
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
步进电机驱动器细分怎么调2024-06-12 6042
-
如何正确选择步进电机驱动器2024-06-05 4632
-
步进电机驱动器拨码开关怎么调2024-01-15 7561
-
步进电机驱动器的主要驱动方式有哪些?2023-11-14 4927
-
M415步进电机驱动器怎么使用2022-01-06 1466
-
步进电机驱动器的分类及模块2021-10-02 11334
-
台信接近开关ZZE-M2204KA产品规格书2021-08-14 866
-
步进电机驱动器调速方法_步进电机驱动器的作用2020-04-20 13133
-
步进电机驱动器工作模式_步进电机驱动器电路图2019-10-01 10586
-
七特步进电机驱动器型号2018-11-21 2542
-
YKA2204MA/YKB2204MA细分驱动器应用手册2017-09-22 2364
-
SJ-3C075M 三相反应式步进电机细分驱动器2010-01-09 661
-
步进科技推出两款新型驱动器2M860和2M5302009-08-21 1205
全部0条评论

快来发表一下你的评论吧 !
