

舵机对比伺服电机,步进电机有哪些优点?
描述
在讲这个问题之前,先简单介绍一下舵机、伺服电机、步进电机是什么以及它们的优缺点。
伺服电机是一个电机系统,它包含电机、传感器和控制器。直流无刷电机可以是伺服电机里面的一部分,交流电机也可以是,但他们并不是伺服电机。仅仅一台电机都不能算是伺服电机,因为他们并不具备伺服电机的功能。因此常常体积较大,主要用于比较精准的位置、速度或力矩输出。
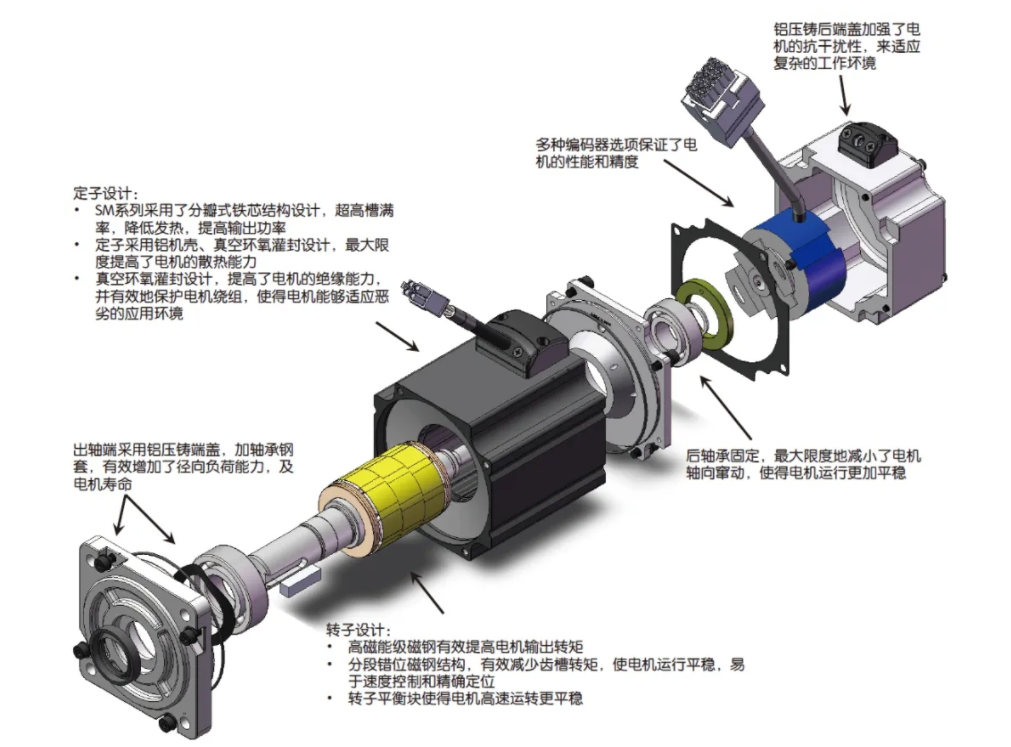
伺服电机结构图
步进电机英文是stepper/step/stepping motor。主要是依靠定子线圈序列通电,顺次在不同的角度形成磁场,推拉定子旋转。步进电机的好处是,你可以省掉用于测量电机转角的传感器。因此在结构上和价格上有一定的优势。而且它的位置和速度控制相对简单。其缺点是,第一,与同等功率的电机相比载荷比较小,没有角度传感器的情况下不能输出大力矩。第二,功耗相对较大,要么全开,要么全关。所以要么接近满功耗,要么就不能出力。
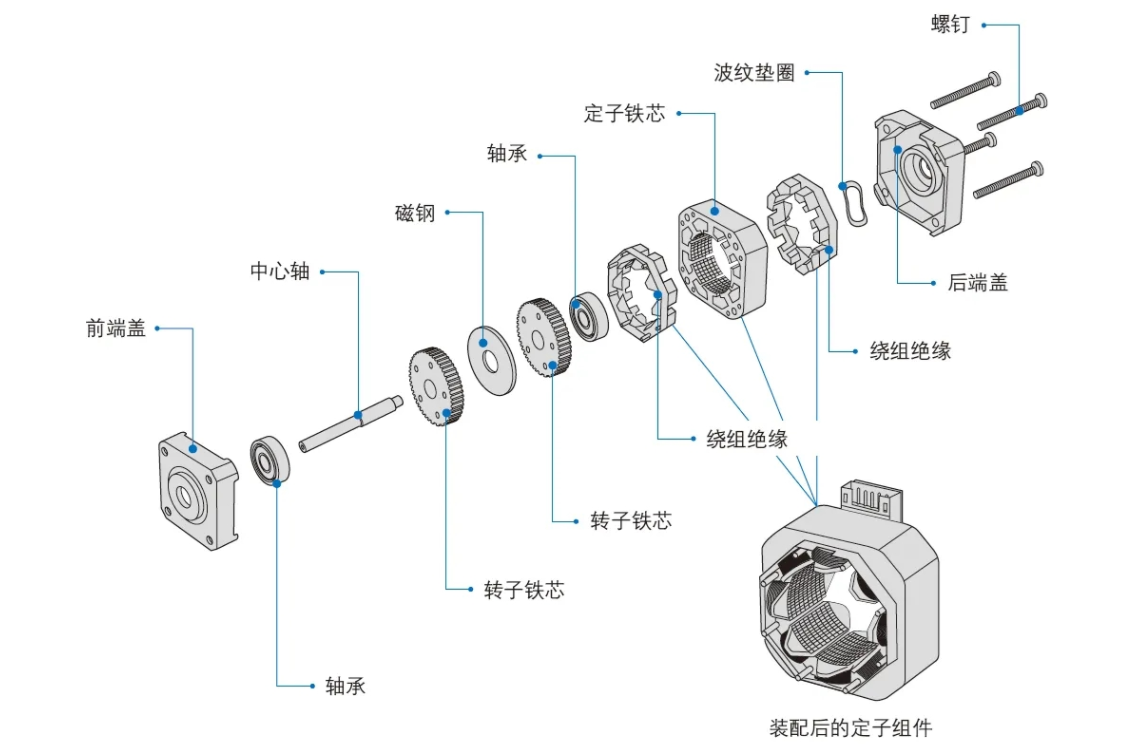
步进电机机构图
舵机是什么呢?舵机是个俗称,是玩航模、船模的人起的,因为它常用于舵面操控,其实就是一个简易的伺服电机系统,同时也是最常见的伺服电机系统,英文叫做Servo,就是Servomotor的简称。
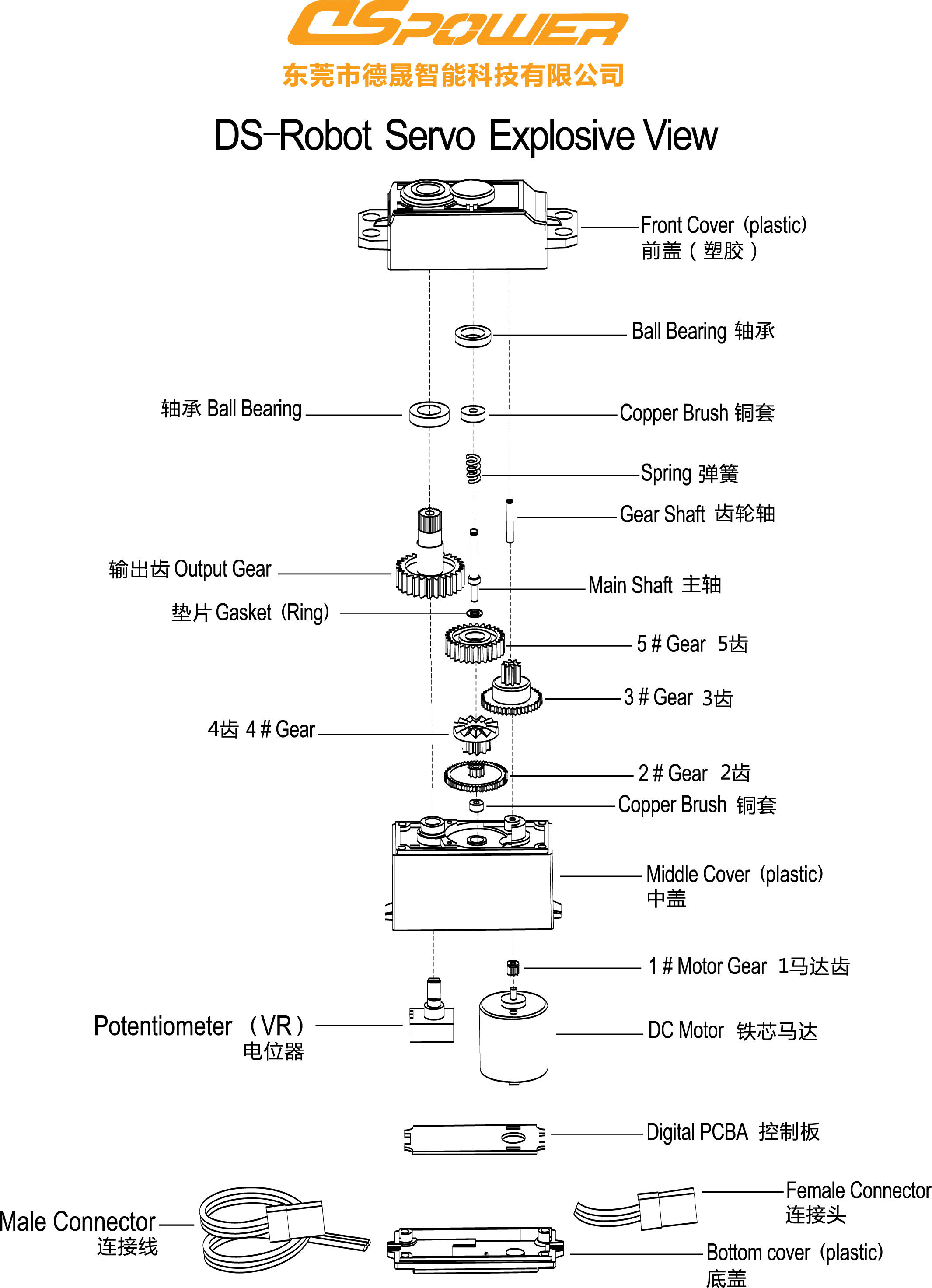
舵机结构图
以前的舵机就只是将PWM信号与滑动变阻器的电压相比对,通过硬件电路实现固定控制增益的位置控制。但经过多年的发展,舵机的技术性正在不断的提高。现在的舵机舵机不再只是通过简单的硬件电路实现固定控制增益的位置控制,而是可以采用更复杂的控制策略和算法来实现更高级别的控制。例如,可以采用先进的控制算法如PID控制器、模糊逻辑控制器等来实现舵机的精确位置控制和速度控制,以满足不断变化的应用需求。
此外,随着舵机技术的不断发展,也出现了多种舵机接口协议和通信方式,如RS485、CAN、UART等,这些接口协议和通信方式可以支持舵机之间的双向通信和数据交换,以实现更高级别的控制策略和更复杂的系统应用。
另外,还可以将舵机与传感器、执行器等其他设备进行组合应用,以实现更复杂的系统功能。例如,在机器人领域中,可以通过舵机控制机器人的关节运动,并使用传感器反馈机器人的位姿信息,以实现机器人的自主运动和智能控制。
也就是说,它本身就是一个完整的伺服电机系统,相对于伺服电机来说,成本更低,同扭矩下体积也更小,虽然精度没那么高,但操作更加简单。
而相对于步进电机呢,有以下三个优点:
1、控制精度:步进电机通过控制脉冲数量进行定位,而舵机则是根据设定的控制信号,按照设定的要求运行,可以实现精确的运动控制。
2、应用领域:步进电机多用于简单的位移控制,而舵机则更多应用在航模等需要进行高精度姿态控制的领域。
3、负载能力:与步进电机相比,舵机的负载能力更强,能够承受更大的外部阻力。
总的来说,与伺服电机相比,舵机是一个完整的伺服电机系统,但体积更小,成本更低,操作起来也更加简单。这使得舵机在许多应用场景中成为伺服电机的优秀替代品,例如在无人机、模型制作等领域。虽然舵机的精度可能不如伺服电机,但它的体积小、重量轻、成本低以及操作简单的特点使得它在许多应用场景中表现出色。而和步进电机相比,舵机的控制精度和负载能力都相对更加优秀,应用的范围也更广。
-
舵机与伺服电机的区别是什么?2025-10-13 2915
-
请问步进电机/舵机/伺服电机的区别?2023-06-19 717
-
步进电机与伺服电机对比2023-03-23 1512
-
伺服电机和步进电机有什么不同2022-01-04 38077
-
步进电机、伺服电机与舵机有哪些区别2021-09-28 3926
-
舵机的原理是什么?控制舵机的方法有哪些?2021-09-27 9676
-
步进电机/伺服电机/舵机有什么区别?2021-09-26 3459
-
步进电机、伺服电机和舵机相关资料分享2021-06-28 1235
-
步进电机和伺服电机有什么不同2020-12-14 7830
-
步进电机和伺服电机怎么选(性能优势对比/选用原则)2018-06-01 19336
-
一文看懂步进电机和舵机及伺服电机的区别2018-05-11 135031
-
精辟!伺服电机、舵机、步进电机的区别2016-01-07 70261
全部0条评论

快来发表一下你的评论吧 !
