

RK3568开发板SG90 舵机模块的功能实现
描述
1 模块说明
SG90 舵机模块如下图所示:
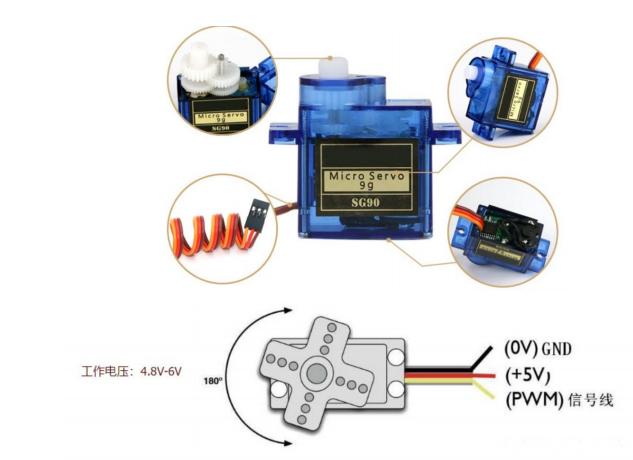
常见的舵机转向角度有 0-90 度,0-180 度,0-360 度,可以用在垃圾桶项目开盖用,智能小车的全比例转向,摄像头云台,机械臂等。
2 接线说明
SG90 舵机模块上三条线,三条线定义如下:
棕线:GND
红线:VCC 4.8V-7.2V
黄线:脉冲输入
3 程序测试
驱动模块在网盘资料“iTOP-3568 开发板\02_【iTOP-RK3568 开发板】开发资料\09_系统外设功能测试\06_V1.7 底版外设快速测试资料\13_SG90 舵机(90 度)模块\03_驱动模块”目录下下载。
首先将 pwm-SG90.ko 驱动模块拷贝到开发板的根目录,然后输入“insmod pwm-SG90.ko” 命令加载驱动模块, 然后使用命令“ls /dev/sg90”进行设备节点的查看,
然后下载网盘资料“iTOP-3568 开发板\02_【iTOP-RK3568 开发板】开发资料\09_系统外设功能测试\06_V1.7 底版外设快速测试资料\13_SG90 舵机(90 度)模块\04_测试程序”下的测试程序。将 sg90_test 可执行文件拷贝到开发板的根目录下如下图所示:
sg90 节点就是 SG90 舵机的设备节点文件,然后使用命令“./sg90_test 角度”运行 SG90 舵机模块的测试程序,
./sg90_test 90
./sg90_test 180
./sg90_test 45
会发现舵机会转相应的角度。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制舵机SG90的教程2021-08-10 3632
-
STM32驱动SG90舵机的方法2022-02-21 1783
-
STM32驱动SG90舵机2021-12-24 4140
-
pwm控制SG90舵机资料分享2022-07-10 1527
-
【ROC-RK3568-PC开发板试用体验】Firefly ROC-RK3568-PC开发板初探2022-10-18 5657
-
RK3568/RK3588开发板人工智能AI摄像头识别功能方案2023-03-27 5160
-
瑞芯微RK3568主板开发板PET_RK3568_P01简述2023-08-08 6687
-
迅为RK3568开发板GPIO之外接模块2023-08-24 3338
-
迅为RK3568开发板可实现多屏异显控方案2022-07-15 3229
-
迅为RK3568开发板外接模块之HX711 称重模块2023-08-30 3102
-
RK3568开发板外接超声波传感器测距模块2023-09-18 1970
-
RK3568开发板规格书2022-03-23 1742
-
RK3568开发板支持AMP双系统2024-06-04 2138
-
【迅为】瑞芯微RK3588开发板RK3568开发板区别及优势2024-11-18 2537
-
【迅为工业RK3568稳定可靠】itop-3568开发板Linux驱动开发实战:RK3568内核模块符号导出详解2025-11-21 2059
全部0条评论

快来发表一下你的评论吧 !
