

先进的CMOS探测器:开创天文观测的未来
电子说
描述
介绍
基于地面的天文学提供了一种在太空中成像物体的方法。由于太空中的大多数物体都可以在可见光波长范围(380-700 nm)内观测到,光学天文学一直处于天文观测的前沿。太空中的许多物体都非常微弱,需要一台灵敏度高、噪音最小的相机来检测它们的微弱信号。
几十年来,在可见光中具有>95%量子效率(QE)的背照CCD一直是天文观测的首选探测器。空间内物体的微弱信号通常需要很长的曝光时间来确保检测。图1显示了CCD相机拍摄的两幅图像,一幅是昂宿星团,另一幅是银河系。
检测该信号的能力受到各种噪声源的约束,并且该限制通常由信噪比或SNR来定义。通常,SNR越高,图像就越好。有几种噪声源,包括来自源的散粒噪声和来自天空的背景噪声,这是地面观测所固有的[1]。
另外两个噪声源是相机固有的,即读出噪声和热噪声。读取噪声本质上是图像的“噪声基底”,并通过适当的电子设计来降低。热噪声或暗电流是由热源产生的噪声,与温度和暴露直接相关。无论相机技术如何,暗电流都会随着长时间曝光(几分钟或更长时间)而增加。为了显著减少暗电流并提高SNR,背照CCD被深度冷却,以减少对信号有贡献的热噪声量[2]。由于这些原因,当需要很长时间的曝光来捕捉微弱的信号时,CCD相机是最好的选择。
在地面天文学中还有其他应用,CCD并不是最好的解决方案。其中之一是要求以更快的时间尺度操作成像传感器。时域天文学和空间碎片跟踪等应用需要更快的时间尺度来捕捉尽可能多的动态物体或事件信息。
更快的时间尺度由曝光和读出速度的组合决定。对于CCD的光子被转换为光电子,在读出过程中,检测到的光电子需要转移到一个(有时是几个)读出节点,这会导致读出速度减慢的瓶颈。CCD上的快速读出需要通过模数转换器(ADC)对这些读出节点处的信号进行非常快速的测量。这种高速测量通过引入高水平的读取噪声来降低信号质量[3]。具有大传感器面积和高像素数(4k x 4k或更大)的探测器具有很长的读出时间,在这种情况下无法获取信号,即使在较高的ADC速率下,也从几秒到几十秒不等。
通常在天文学中使用的全帧CCD需要机械快门来完全阻挡读出期间的任何入射光[4]。机械快门的使用寿命有限,在相机大量使用时经常需要更换。这对偏远地区的天文台来说可能是个问题,因为那里的维护可能很有挑战性。此外,打开和关闭机械快门相对较慢,导致帧速率较慢,曝光时间较短时会出现定量误差。
EMCCD是一种替代传感器技术,通常用于更具挑战性的动态观测。EMCCD使用片上放大来相对于读取噪声提升信号。有了这种低或可忽略不计的有效读取噪声,EMCCD可以以更高的帧速率操作,更适合捕捉动态事件的演变,同时保持所需的SNR。图2显示了EMCCD传感器架构的示意图,显示了片上放大如何将信号提升到读取噪声之上。
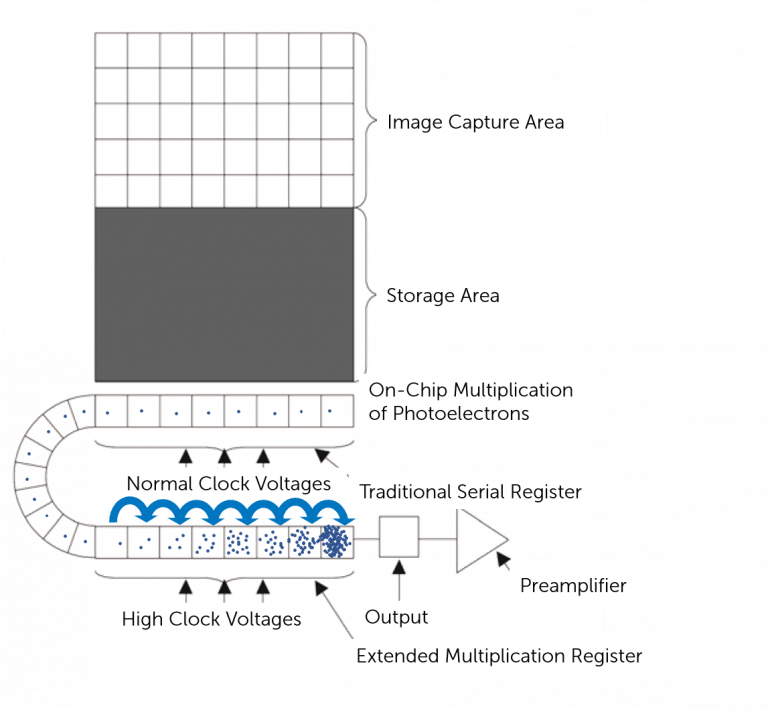
图2:EMCCD传感器示意图。在图像捕获区域内收集光子并将其转换为光电子,然后将其转移到存储区域。然后,这些电子在扩展乘法寄存器中被放大,这增加了所产生的信号而不增加任何读取噪声。
许多EMCCD都有一个快速的电子快门,在读出之前,通过将检测到的光电子转移到帧存储区域来停止曝光。电子快门不仅比机械快门更精确,而且还降低了检测器的死区时间,在该死区时间内,相机不曝光,因为随着信号从存储区域读出,后续曝光已经开始。这被称为“高占空比”。
尽管EMCCD可以在更高的帧速率、占空比下工作,并且是检测超微弱信号的理想选择,但它们受到过量噪声的限制。这种额外的噪声源是由芯片上放大过程的随机性质引起的,并且对于每个像素大于几个光子的信号,这种噪声源会导致整体灵敏度的牺牲。有关这些限制的更多信息,请参阅我们的文章相机传感器类型[5]。
先进CMOS技术的优势
传统的CMOS传感器没有被广泛考虑用于天文观测,因为它们是前照式的,与CCD和EMCCD传感器相比,通常具有低QE,并且在更高的读取噪声和较差的线性度(检测信号和数字信号之间的比例)下工作。然而,CMOS技术的进步现在使得CMOS不仅能够匹配CCD和EMCCD传感器的这些参数,而且能够克服这些技术的共同局限性。
背照式CMOS技术
背照式CMOS传感器的引入显著提高了QE,可见光波长达到>90%。此外,先进的CMOS传感器设计,如Teledyne Imaging的LACera™ 与典型的CCD相比,技术在紫外线下显示出更高的灵敏度(见图3)。这使得先进的CMOS探测器不仅适用于可见光波长范围内的观测,而且适用于那些利用紫外线光谱的探测器。
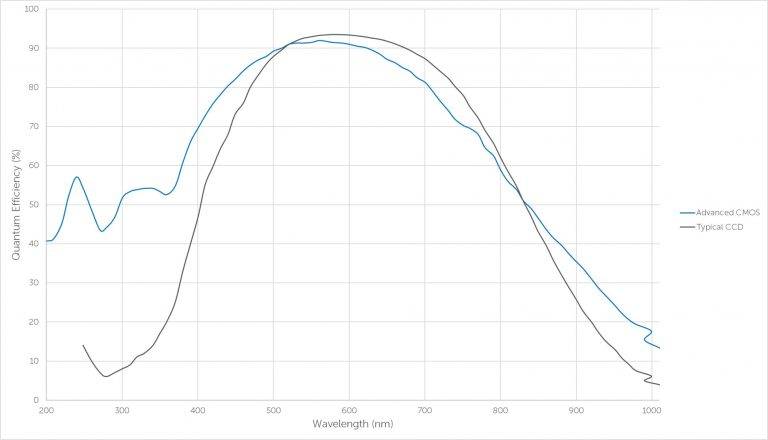
图3:先进CMOS传感器和典型背照式CCD传感器的量子效率曲线。
CMOS传感器体系结构
与CCD传感器不同,CMOS传感器上的电荷-电压转换在每个像素中单独进行(见图4),传感器每列上的读出节点同时工作。这种并行读出架构提供了巨大的速度优势,允许CMOS传感器以更快的速率处理采集的数据,同时实现比CCD更低的读取噪声,并且没有EMCCD的过度噪声。
快速读出不仅对动态天文成像很重要,而且对快速决策和分析也很重要,例如在用于校正大气湍流的自适应光学系统中。CMOS传感器还使用精确的电子快门,允许在不丢失数据的情况下进行连续成像。
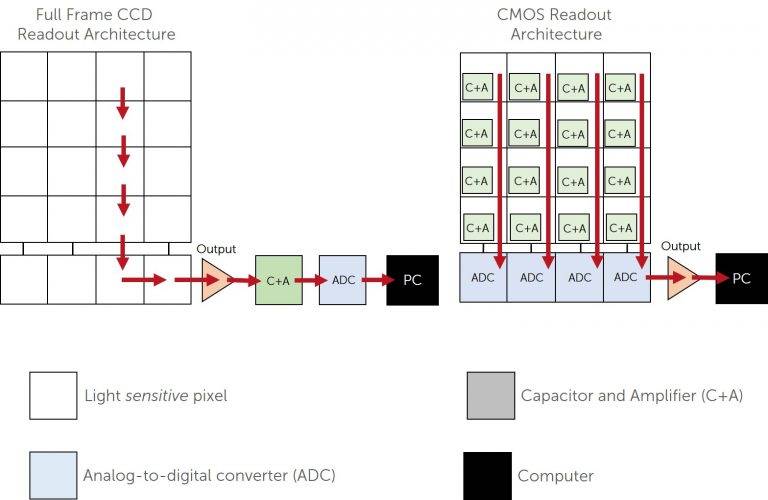
图4:全帧CCD读出结构与CMOS读出结构的比较示意图。全帧CCD上的像素沿传感器垂直向下移动,直到它们读取读出阵列。然后,它们逐像素水平移动,直到被模数转换器(ADC)读出。相比之下,CMOS架构每列有一个单独的ADC,在保持低读取噪声的同时提高了读取速度。
高动态范围
在天文学中,在同一视场内同时有明亮和暗淡的物体并不罕见。高动态范围(HDR)使微弱天文物体的探测成为可能,而不会使探测器被周围较亮物体的光饱和。HDR操作取决于线性度、ADC位深度和增益。CMOS相机可以通过对具有高增益和低增益的信号进行多次采样来扩展动态范围。然而,高增益读数和低增益读数之间的交叉中的伪影会限制测量精度。
先进的CMOS设计,如Teledyne Imaging LACera™ 技术,确保两个ADC之间的精确交叉,以实现低噪声和高线性的操作。结合更高比特深度ADC,LACeraTM技术提供了无与伦比的动态范围。有关LACeraTM技术HDR操作的更多详细信息,请参阅我们的文章《高动态范围CMOS的新时代》[6]。
真全局快门
CMOS传感器通常通过一种称为滚动快门的过程开始曝光、读取并逐行清除传感器。尽管这个过程非常快,但它可能会给快速移动的物体带来失真、帧之间的潜在延迟以及同步困难,这对许多天文学应用都是有害的(见图5)。
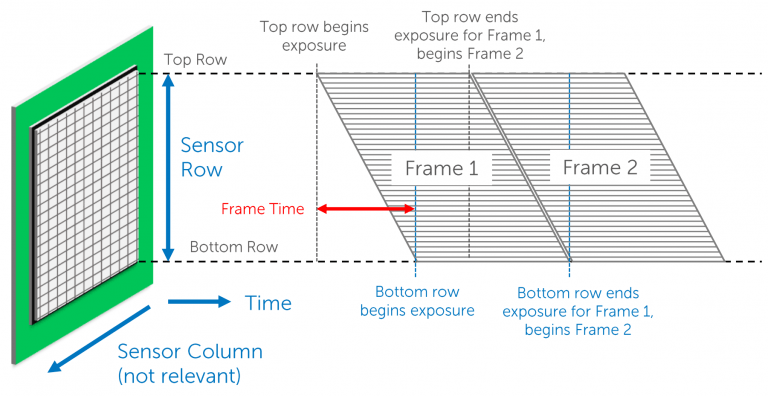
图5:相机传感器如左图所示,采用滚动快门结构,这意味着整个传感器的曝光不会同时开始,而是从传感器的顶部向底部移动。时间维度是从左到右显示的,垂直轴上显示的是读取的行。滚动行为的时间尺度是相机的帧时间,通常在20ms左右。
或者,同时读取和重置所有检测器像素的全局快门对于背照式CMOS传感器来说是一项挑战。对于全局快门设备,要结束曝光,需要立即将光电子移动到存储区域。这个存储区域通常是光敏的,这意味着不需要的光子与之相互作用可能会产生伪影。
存储区域可以隐藏在用于前照式CMOS传感器的传感器部件下方;然而,对于背光技术来说,这更具挑战性。与LACera技术一样,先进的背照式CMOS技术重新设计了存储区域,以实现真正的全局快门操作,而不会产生伪影。在我们的文章中了解更多关于这个过程的信息:用大幅面背照CMOS实现真正的全局快门[7]。
大视场
并行化和高速操作使CMOS设计成为大面积传感器设计的理想选择。CMOS相机现在已经开发出像素数为6k x 6k及以上的相机,以及具有高QE和低读取噪声的大像素尺寸(10μm),用于在一帧内对较暗、高速物体或多个较暗物体进行精确成像。
大传感器尺寸的好处包括更少的望远镜移动来跟踪快速移动的物体(空间碎片),每帧观察更多的物体(巡天),以及通过观察更多的参考恒星来更好地校准图像。
总结
尽管CCD和EMCCD技术在地面天文成像中有其优势,但背照式CMOS相机技术符合其规格,同时克服了其在速度、占空比和噪声性能方面的限制。CMOS设计具有高QE、高动态范围、短读出时间和低噪声的特点,使其成为广泛天文学应用的竞争替代品。
审核编辑 黄宇
-
探测器革命2026-04-16 213
-
CdZnTe探测器γ射线响应及稳定性研究2010-04-22 2480
-
光子探测器2014-03-03 6009
-
honeywell火焰探测器2018-04-27 3148
-
移动天文观测系统有什么特点?2019-08-30 1602
-
激光干涉仪引力波探测器中的主要噪声源2020-12-18 2567
-
CAD中如何布置火灾探测器?消防探测器范围计算2021-04-28 6531
-
CMOS探测器在射线检测中的设计应用2010-03-20 2751
-
红外探测器——热探测器详解2022-11-08 5051
-
高性能超导相变边缘单光子探测器助力天文观测2023-06-25 3020
-
红外探测器:热探测器与光子探测器2023-07-19 3848
-
航天遥感红外探测器需求与发展综述2023-10-27 3137
-
如何提高金属探测器探测率2024-11-29 3471
-
睿创微纳短波红外探测器助力超新星观测2025-03-07 1169
-
光电探测器PMT、APD、CCD、CMos、ICCD、EMCCD2025-09-16 2571
全部0条评论

快来发表一下你的评论吧 !
