

ZYNQ设计的基本流程
描述
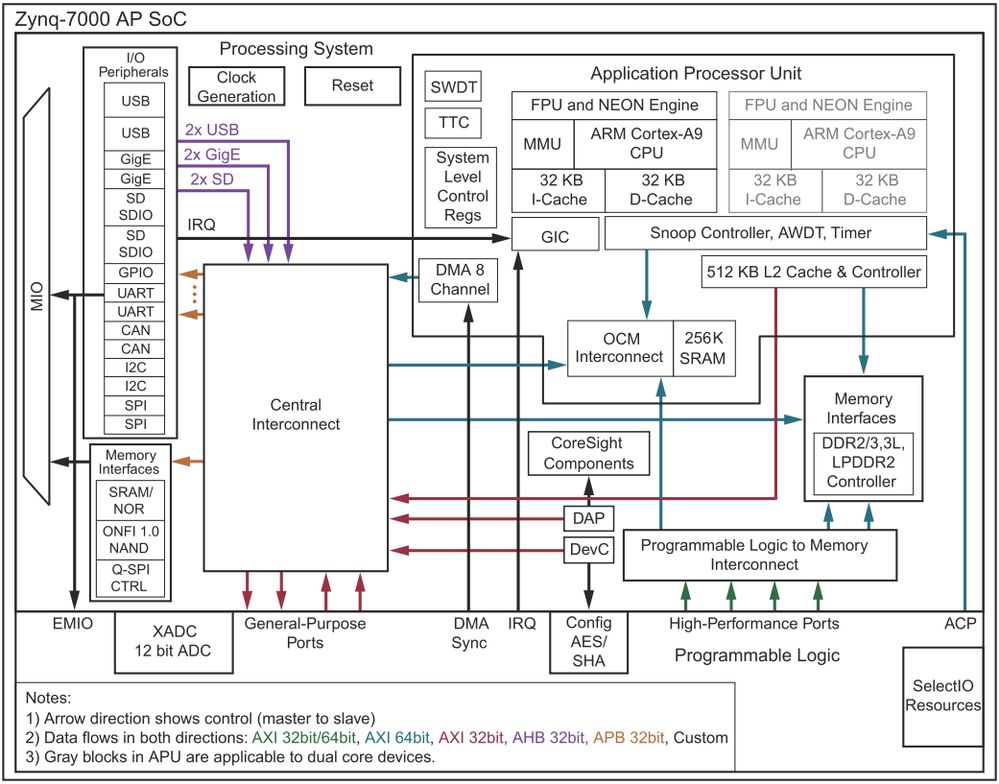
ZYNQ内部包含PS和PL两部分,PS中包含以下4个主要功能模块:
Application processor unit (APU)
Memory interfaces
I/O peripherals (IOP)
Interconnect
ZYNQ内部的总体框架如所示,PS中包含2个ARM Cortex-9的内核,一些基本的外设扩展口以及Memory接口。PS和PL的相互通信通过两个通路完成,分别是GP(General Purpose)Ports和HP(High Performance)Ports。
GP Ports包含2个Master接口和2个Slave接口,符合标准的AXI协议数据位宽是32bit。HP Ports包含4个接口,全部是PL作为Master;有两个专用的连接到DDR Controller的接口和一个连接到OCM的接口。HP与GP相比,最大的特点在于有额外的FIFO作为Buffer,可以提高传输效率和数据吞吐量。
所以从功能角度,GP Ports主要用于寄存器的读写以及小数据量的传输;HP Ports用于大量数据的传输,主要是Memory数据的读写。
ZYNQ中最常用的设计思路是将主程序放在PS中完成,在PL中设计相应的逻辑功能作为PS的外设使用,将逻辑设计封装成IP,且每个IP都包含一个标准的AXI-Lite接口。PS对于逻辑设计的控制是通过控制逻辑设计的功能寄存器,进而控制逻辑设计进行相应的操作,同时将工作情况通过状态寄存器返回给PS端。如果逻辑设计与PS端需要进行大量数据的交互,则会在逻辑设计中增加AXI-Full接口,与PS的HP Port相连。
综上,ZYNQ设计的基本流程包含以下步骤:
Vivado中搭建ZYNQ平台,完成基本外设控制。
创建逻辑设计,并封装成IP。
ZYNQ设计中调用封装的IP。
对设计的IP进行仿真。
ZYBO开发板简介
ZYBO是Digilent开发的以XC7Z010-1CLG400C为核心处理器的开发板,其主要功能包括有:
1片32bit位宽,512MB容量的 DDR3
1个 HDMI port
1个VGA source port
1个(1Gbit/100Mbit/10Mbit) Ethernet PHY 与RJ45接口
1个MicroSD slot
1个OTG USB 2.0 PHY
1个外部 EEPROM
1个耳机输出接口和1个麦克风输入接口
1片128Mb QSPI Flash作为加载Flash
1个JTAG接口和1个USB-Converter下载接口
GPIO: 6 pushbuttons, 4 slide switches, 5 LEDs
6个 Pmod ports
其板上器件分布情况如图 2和图 3所示。
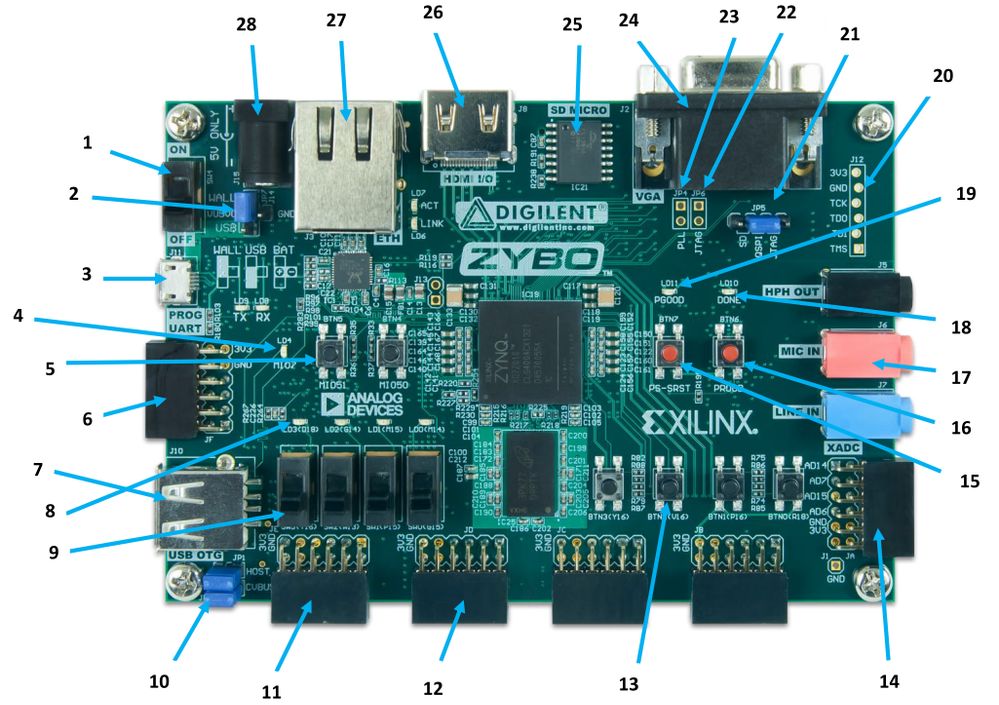
图2
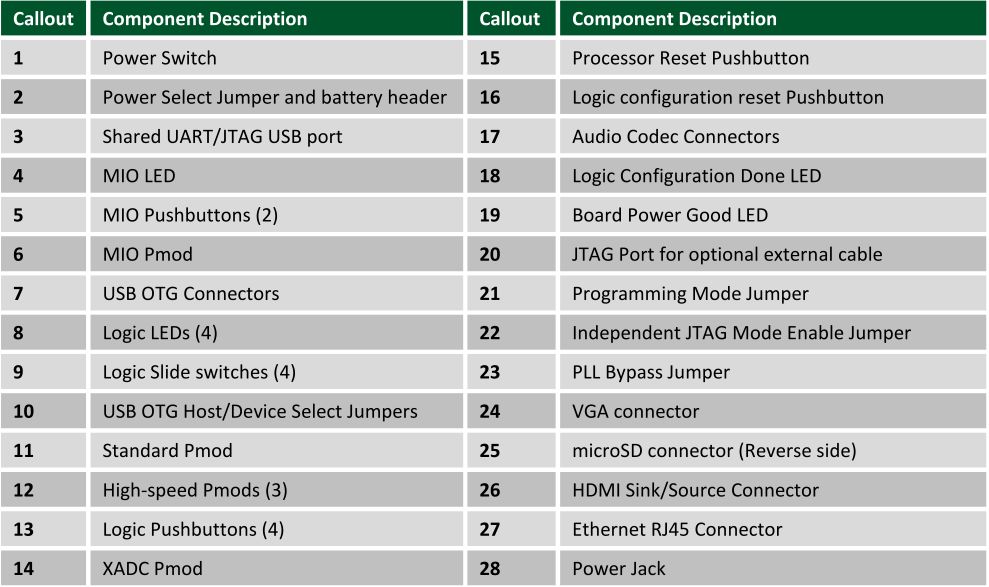
图3
Vivado中进行ZYNQ硬件部分设计
Step1: Viavdo中选择XC7Z010-1CLG400器件,建立工程。
Step2: 建立Block Design。
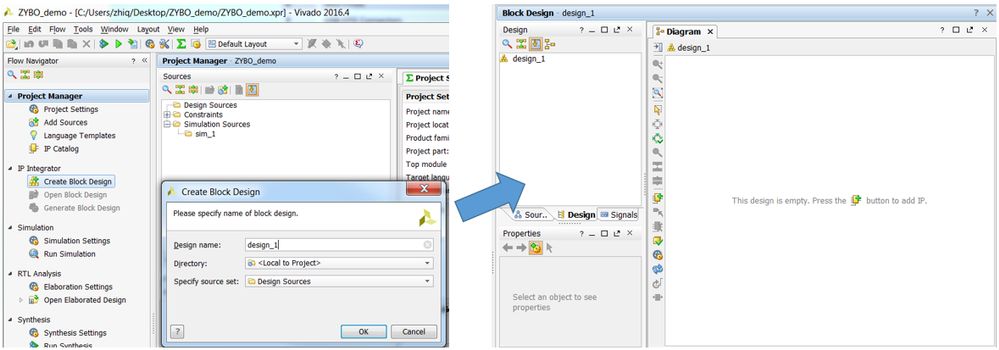
图 4
Step3: 加入ZYNQ7 Processing System和其他所需要的外设IP。
点击“Add IP”,加入ZYNQ7 Processing System和AXI GPIO,双击IP可以对其进行配置。该实验中ZYNQ7配置使能UART,引脚为MIO48和49,其ZYBO相关电路图如图 5所示。(注:如果需要在Step11中选择Hello World工程,则需要使能UART)。AXI GPIO的位宽设置为4,其余为默认配置。
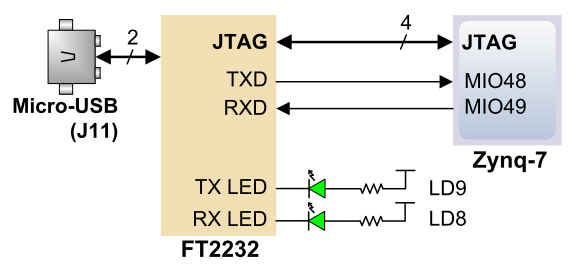
图 5
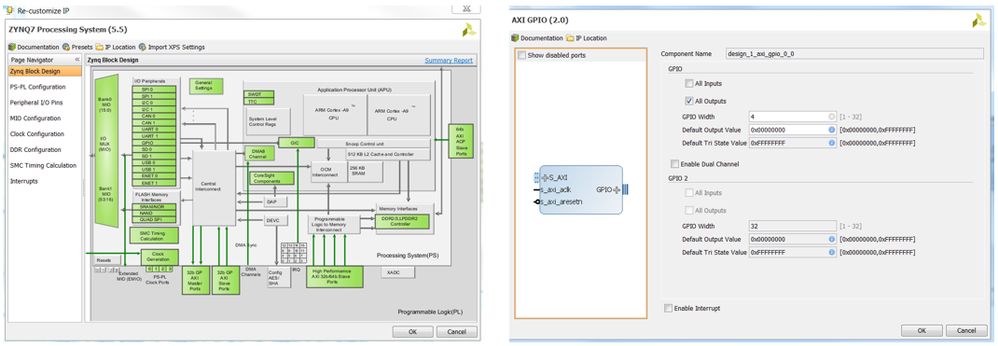
图 6
注意:这里有个地方非常容易出错。在Vivado建立工程选择器件的过程中没有选择ZYBO开发板的配置,而是直接选择的XC7Z010-1CLG400C器件的配置。系统默认的ZYNQ7 Processing System配置中Input Clock Frequency是33.3333MHz,而ZYBO板上为50MHz。此处必须修改过来,否则后面的系统时钟会完全错乱,导致软件工程无法运行。
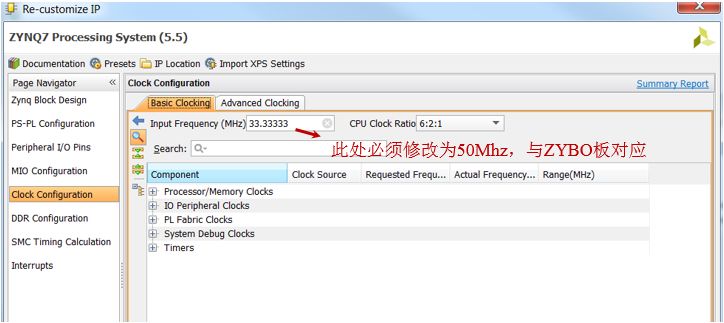
图 7
Step4: 点击“Run Block Automation”,其作用是完成ZYNQ7 Processing System专用引脚的连接,包括FIXED_IO和DDR引脚的连接。
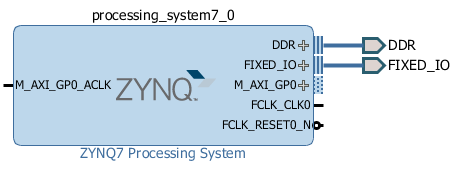
图 8
Step5: 点击“Run Connection Automation”,其作用是自动完成ZYNQ与外设的连接,连接是按照工具对于用户所设计系统的理解,如果需要进行修改,可以手动更改Block中的连线。该操作工具会默认增加:
AXI interconnect
Processor System Reset
自动完成了外设IP的AXI-Lite端口与ZYNQ7 Processing System的连接,默认接法是ZYNQ的FCLK_CLK0作为外设AXI时钟,Processor System Reset产生外设复位信号连接到所有外设的复位端口。
将AXI GPIO的引脚引出。
可以使用“Regenerate Layout”,重新布局Block Design。
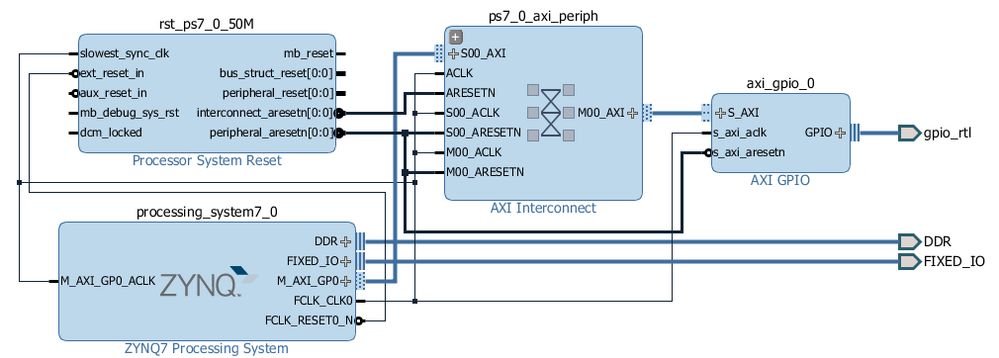
图 9
Step6: 在“Address Editor”中查看、修改外设在总线上的地址。

图 10
Step7: 首先在Block design界面右击弹出的菜单中点击Validate Design,以验证Block Design的设计和连接是否有错误。至此Block Design完成了,但是还需要根据Block Design的配置生成相应的源代码。右击.bd设计,并选择“Create HDL Wrapper”。随后即生成了相应的HDL代码。
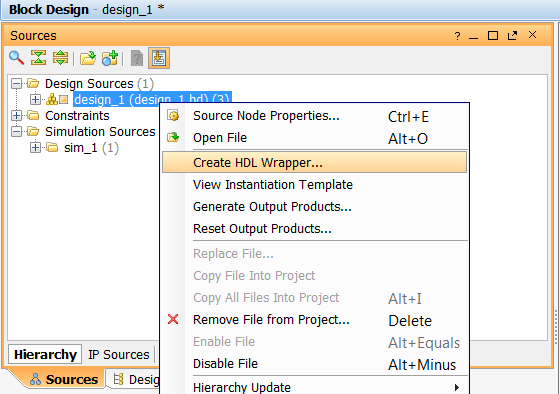
图 11
Step8: 对于PL端的外接引脚,需要设置相应的Constraints。
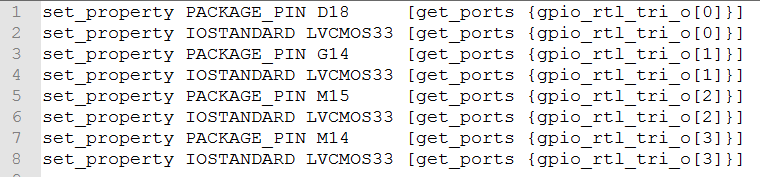 图 12
图 12
Step9: 与普通FPGA设计一样,完成Synthesis、Implementation和Generate Bitstream。
Step10: 将Step9中完成的硬件设计导入到SDK开发平台下。
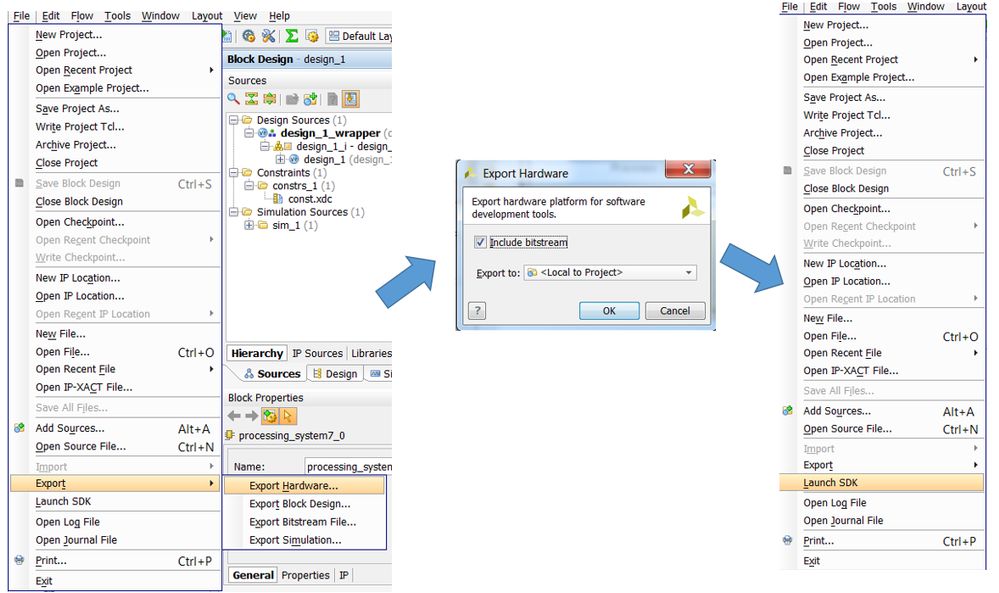
图 13
Step11: 从这一步开始,开发平台转移到SDK平台。此时硬件平台已经确定,接下来是软件的开发。首先在SDK中建立软件工程。
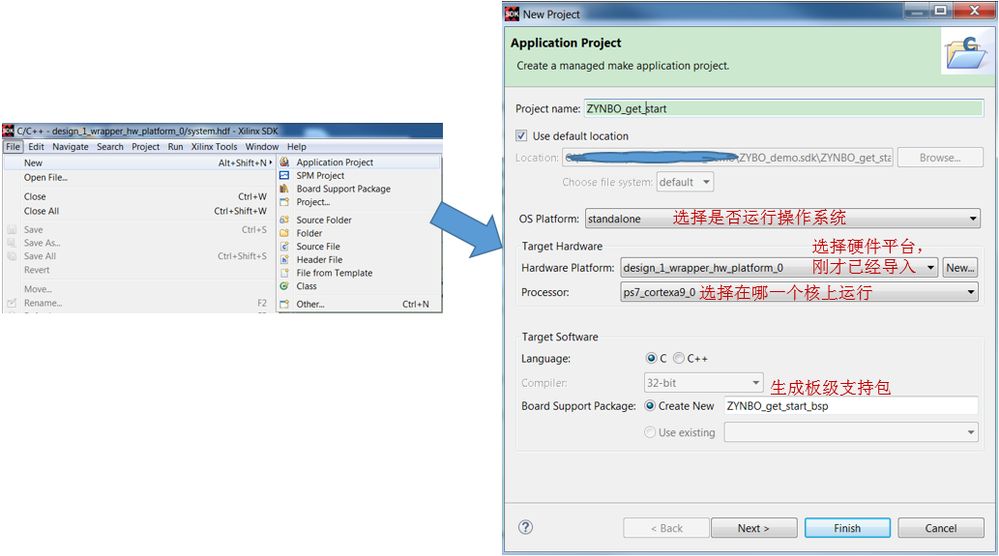
图 14
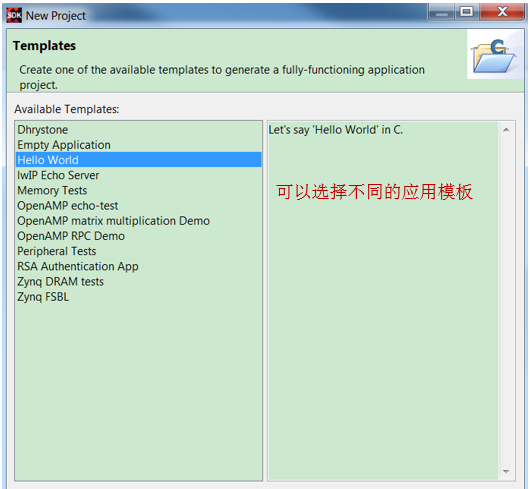
图 15
Step12: 在新建工程中完成C代码的设计。
#include
Step13: 首先点击“Program FPGA”,将硬件平台下载到ZYNQ中。
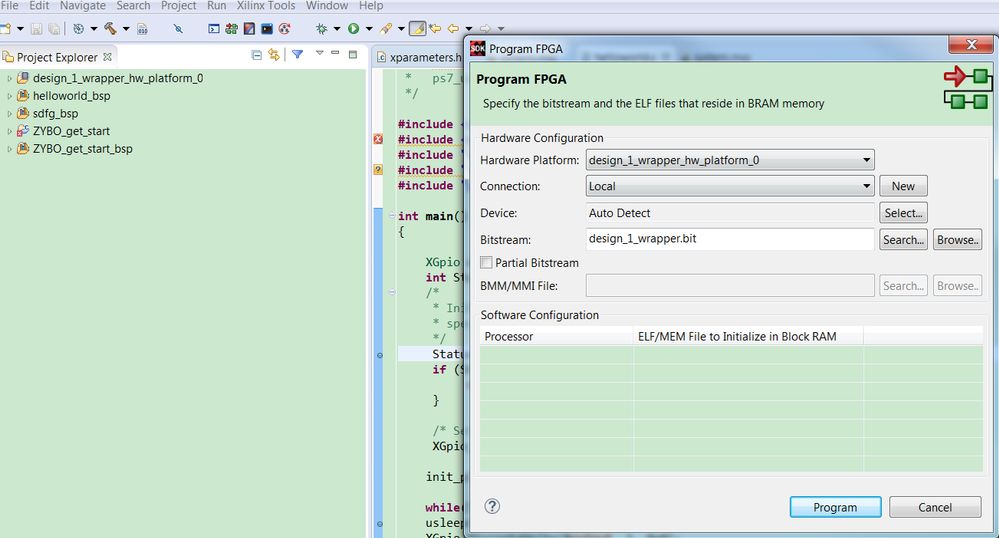
图 16
Step14: 运行软件工程进行调试。
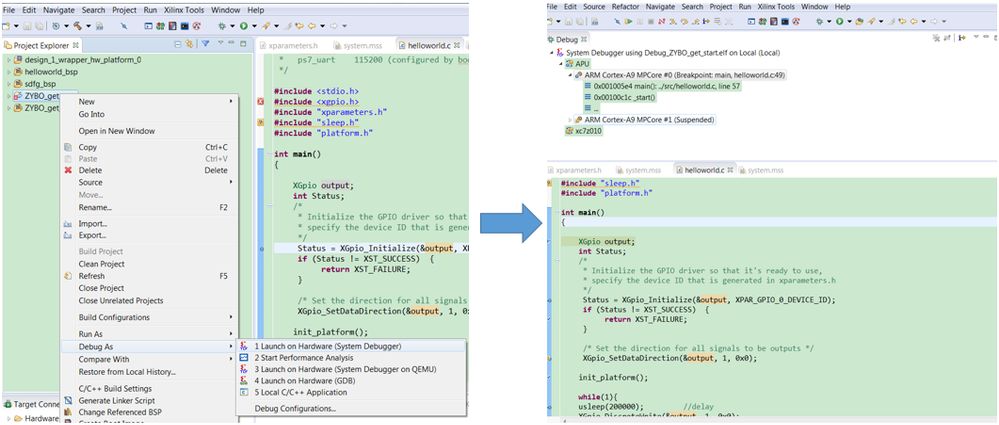
图 17
在ZYBO板上也能看到LED灯闪烁,至此完成了ZYNQ的一个基本设计的所有开发流程。
DK中进行ZYNQ软件部分设计
首先对“Vivado中进行ZYNQ硬件部分设计”中让LED闪烁的C代码做详细的注释。
int main()
{
/*定义外设对于的类型指针,用于绑定外设,便于后面程序调用时选择
* 外设
*/
XGpio output;
int Status;
/* XGpio_Initialize()函数是xgpio.c中的函数,在BSP Documentation可以
* 查到该函数的描述。
* int XGpio_Initialize(XGpio * InstancePtr, u16 DeviceId)
* InstancePtr为GPIO类型的指针
* DeviceId是在板级配置中已经定义好的外设的ID,该定义包含在BSP的xparameters.h中
* 即在xparameters.h已经为该硬件设计中的每一种类型的多个外设设置了唯一的ID
* 例如设计中如果有2个GPIO外设,则ID分别为0和1.
* 该语句完成之后将ID对应的外设对象与该指针进行了绑定,后面可以通过调用该指针指
* 定到该外设
*/
Status = XGpio_Initialize(&output, XPAR_GPIO_0_DEVICE_ID);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/* void XGpio_SetDataDirection (XGpio * InstancePtr,
* unsigned Channel,u32 DirectionMask )
* InstancePtr:外设指针,用于指定到对应的外设设备,已经与外设绑定
* Channel: 每个AXI_GPIO中可以有两个32bit的GPIO端口,该参数用来
* 选择是该外设中的哪一个端口
* DirectionMask:选择GPIO的方向,0为output,1为input
* 该函数的作用是设置GPIO的方向,如前所述,可以通过output指定到
* 该GPIO外设,
*/
XGpio_SetDataDirection(&output, 1, 0x0);
//初始化ARM内核
init_platform();
while(1){
usleep(200000); //delay
XGpio_DiscreteWrite(&output, 1, 0x0);
usleep(200000); //delay
XGpio_DiscreteWrite(&output, 1, 0xF);
};
cleanup_platform();
return 0;
}
以上调用的这些函数,其定义及使用方法全部可以在BSP(Board Support Package)板级支持包中找到。当在Vivado平台中设计完成硬件,将其导入到SDK平台时,工具会根据硬件设计中使用到的外设,自动生成相应的板级支持包。在SDK的“Project Explorer”界面中可以查看,并且可以在其中打开相应的BSP说明文档,如图 18所示。

图 18
但是虽然BSP中提供了所有相关的API函数,但是对于初学者来说,想搭建一个可以实现基本功能的平台还是有些困难。于是另一个方法是利用SDK生成新的Application时提供的Peripheral Test模板。
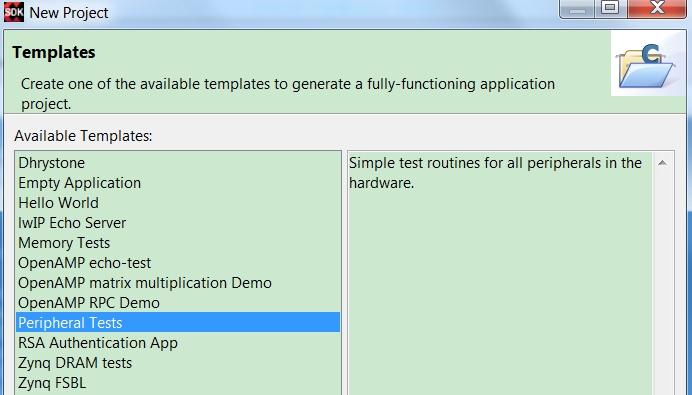
图 19
该模板生成的代码中,在主函数中找到相应外设的测试函数,例如本例中GPIO的测试函数“GpioOutputExample()”,再通过追述该函数的具体实现,可以一定程度上作为最基本的范例代码。
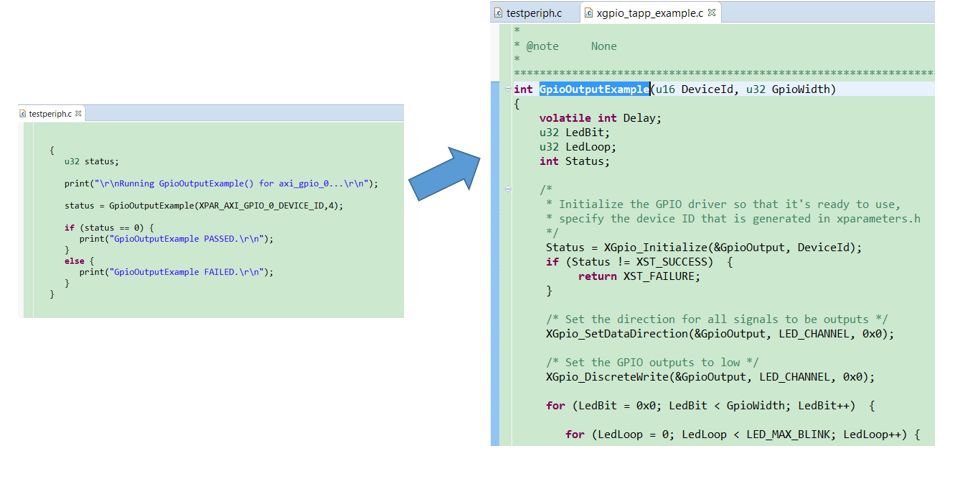
图 20
如果再进一步深入到ARM编程的本质,其实与硬件的所有控制和通信都是依靠读写底层的寄存器来完成的。例如如果查看一下“XGpio_SetDataDirection()”函数的底层实现,可以发现逐级调用的分别是“XGpio_WriteReg()”函数和“XGpio_Out32()”函数,而“XGpio_Out32()”调用的是“Xil_Out32()”。其实“Xil_Out32()”和“Xil_In32()”这两个函数分别是写读底层硬件寄存器的两个函数,所有的上层与底层的寄存器级别的通信,也就是绝大多数的外设控制,都是依靠这两个函数完成的。
审核编辑:汤梓红
-
Xilinx Zynq小试FPGA开发流程2023-03-14 3882
-
ZYNQ7020的PS端的基本开发流程2022-07-24 13483
-
ZYNQ 的启动流程介绍2022-07-22 10759
-
ZYNQ的启动流程2022-05-07 8768
-
典型的ZYNQ开发流程2022-02-08 9151
-
ZYNQ嵌入式系统的开发流程2021-10-27 1571
-
基于Zynq的嵌入式开发流程2021-08-23 2028
-
ZYNQ芯片开发流程的简介2021-01-26 3998
-
Zynq在非JTAG模式下的启动配置流程2021-01-08 2247
-
Zynq UltraScale+ MPSoC的ZCU102开发套件的开发流程2018-11-27 5830
-
Zynq开发流程的捷径SDSoC2018-07-02 2367
-
linux下开发基于zynq的嵌入式操作系统流程2018-03-15 1014
-
ZYNQ学习 —— 启动流程分析及各环节文件生成流程(ZedBo2016-05-11 1202
全部0条评论

快来发表一下你的评论吧 !
